一种高可靠性电磁阀控制系统
文献发布时间:2023-06-19 11:37:30
技术领域
本发明属于电磁阀失电阀门保护领域,尤其涉及一种高可靠性电磁阀控制系统。
背景技术
电磁阀是由电磁线圈和磁芯组成,是包含一个或几个孔的阀体。当线圈通电或断电时, 磁芯的运转将导致流体通过阀体或被切断,以达到改变流体方向的目的。一般用在控制系统 中液体和气体管路的开关控制。
过程控制中使用两位三通电磁阀作为两路阀或调节阀气路控制元件,压缩空气经电磁切 换气路后进出气缸,在压缩空气与气缸弹簧的共同作用下带动阀杆运行,进而达到气动阀门 开启/关闭的效果。本文气动门举例均为下气缸进气。
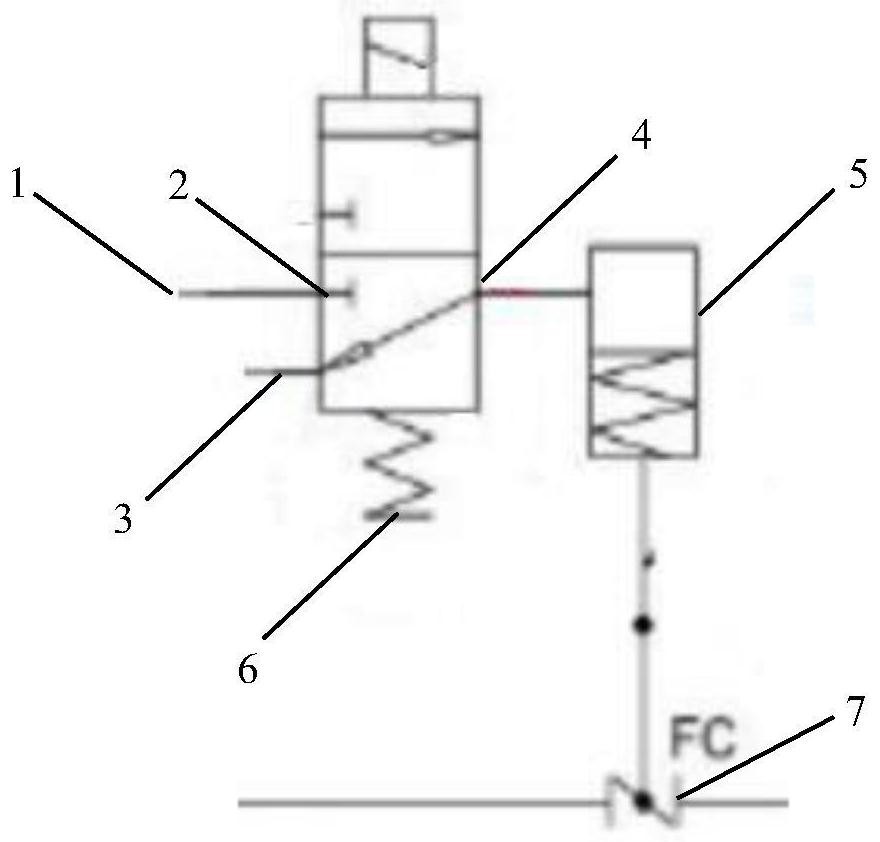
在火力发电领域,一般采用如图1所示单电磁阀进行气动阀门的控制;电磁阀6失电时, 进气口Ⅱ3、出气口4气路导通,气动门气缸5内的压缩空气经出气口4-进气口Ⅱ3排出泄气, 阀门7关闭(下气缸进气型气动阀门)。电磁阀6得电时,进气口Ⅰ2至出气口4的气路导通, 压缩空气由气源1经进气口Ⅰ2-出气口4进入气动门气缸5,阀门7开启(下气缸进气型气 动阀门);但这种单电磁阀控制系统可靠性较低,控制系统的任一环节故障,比如单个电磁阀 的故障、气源管路故障、线缆故障、通道故障等都将导致电磁阀异常,进而引起阀门7误动 或拒动。以燃机为例,燃气事故关断阀、燃气事故排放阀、调压站ESD阀误关将导致机组跳 闸,压气机放气防喘阀等误开时也将导致机组跳闸,均会造成较大的经济损失。
现有的改进型的方案是采用如图2所示双电磁阀:1)正常运行时电磁阀B12带电,压缩 空气经电磁阀B的进气口Ⅰ13-电磁阀B的出气口15进入气缸5,气动门处于进气状态,阀 门A16处于开位置。2)若电磁阀B12异常失电,则电磁阀B的进气口Ⅱ14、电磁阀B的出气口15气路导通,压缩空气由气源1经电磁阀A的进气口A9-电磁阀A的出气口11-电磁阀B 的进气口Ⅱ14-电磁阀B的出气口15进入气缸5,气动门仍处于进气状态,阀门7不动。3) 若电磁阀A8正常,电磁阀B12异常失电,则电磁阀B的进气口Ⅰ13-电磁阀B的出气口15导 通,压缩空气经电磁阀B的进气口Ⅰ13-电磁阀B的出气口15进入气缸5,气动门处于进气 状态,阀门A16仍不动。4)只有电磁阀A8、电磁阀B12均失电时,气缸5气体经电磁阀B 的出气口15-电磁阀B的进气口Ⅱ14排出,阀门A16异常关闭。相比单电磁阀控制,现有双 电磁阀其可靠性有所提升。
目前仅有针对电磁阀失电阀门保护关的双电磁阀方案,未有考虑电磁阀得电阀门保护开 的双电磁阀方案。并且现有双电磁阀只是采用双冗余电磁阀,双电磁阀均动作则阀门动作, 该改进单电磁阀为双电磁阀的方式虽然减少了误动概率,但是提高了拒动风险。
发明内容
本发明的目的是克服现有技术中的不足,提供一种高可靠性电磁阀控制系统。
这种高可靠性电磁阀控制系统,包括双电磁阀双阀门的配置,双电磁阀双阀门的配置中 设有两组电磁阀、阀门A和阀门B,其中一组电磁阀包括电磁阀A和电磁阀B,另一组电磁阀 包括电磁阀C和电磁阀D;
当电磁阀保护关停机时:电磁阀A和电磁阀B并联后一端接入气源,另一端接入气缸, 气缸连接阀门A;电磁阀C和电磁阀D并联后一端接入气源,另一端接入另一个气缸,另一 个气缸连接阀门B;阀门A和阀门B串联后接入系统管路;电磁阀A、电磁阀B、电磁阀C和电磁阀D中任一电磁阀故障导致失电时:气缸管路处于导通状态,对应的阀门A或阀门B保持开状态,系统管路导通;电磁阀A、电磁阀B、电磁阀C和电磁阀D中所有电磁阀均失电时:阀门A和阀门B均关闭,系统管路不导通;
当电磁阀保护开停机时,电磁阀A和电磁阀B串联后一端接入气源,另一端接入气缸, 气缸连接阀门A;电磁阀C和电磁阀D串联后一端接入气源,另一端接入另一个气缸,另一 个气缸连接阀门B;阀门A和阀门B并联后接入系统管路;机组正常运行时:电磁阀A、电磁阀B、电磁阀C和电磁阀D均处于失电状态,阀门A和阀门B均关闭;电磁阀A和电磁阀B 均带电,或电磁阀C和电磁阀D均带电,或电磁阀A、电磁阀B、电磁阀C和电磁阀D均带电 时,系统管路导通。
作为优选,双电磁阀双阀门的配置中选用两位三通式电磁阀。
作为优选,保护关停机的电磁阀包括:燃气事故关断阀、燃气事故排放阀和调压站ESD 阀。
作为优选,保护开停机的电磁阀有压气机放气防喘阀。
这种高可靠性电磁阀控制系统的设计及工作方法,包括如下步骤:
步骤1、当电磁阀失电时,针对阀门保护关停机设计电磁阀控制系统;
步骤1.1、将电磁阀A和电磁阀B并联后一端接入气源,另一端接入气缸,气缸连接阀 门A;将电磁阀C和电磁阀D并联后一端接入气源,另一端接入另一个气缸,另一个气缸连接阀门B;阀门A和阀门B串联后接入系统管路;
步骤1.2、机组正常运行时,电磁阀均带电,电磁阀A的进气口Ⅰ与电磁阀A的出气口导通,电磁阀A的出气口连接电磁阀B的进气口Ⅱ,电磁阀B的进气口Ⅰ和电磁阀B的出气 口导通,压缩空气经过气源经过电磁阀B的进气口Ⅰ、电磁阀B的出气口进入气缸;阀门A 保持开状态;电磁阀C和电磁阀D在机组正常运行时的工作模态参照电磁阀A和电磁阀B;
步骤1.3、电磁阀A、电磁阀B、电磁阀C和电磁阀D中任一电磁阀故障导致失电时,气缸的管路仍导通,阀门A和阀门B保持开状态,系统管路导通;
步骤1.4、每组并联的电磁阀中所有电磁阀均失电时,则该组电磁阀失电;当两组电磁 阀其中一组失电时,对应的阀门关闭;阀门A和阀门B中任一阀门关闭,系统管路切断;
步骤2、电磁阀得电时,针对阀门保护开停机设计电磁阀控制系统;
步骤2.1、电磁阀A和电磁阀B串联后一端接入气源,另一端接入气缸,气缸连接阀门 A;电磁阀C和电磁阀D串联后一端接入气源,另一端接入另一个气缸,另一个气缸连接阀门 B;阀门A和阀门B并联后接入系统管路;
步骤2.2、机组正常运行时,所有电磁阀均失电,电磁阀B的进气口Ⅱ和电磁阀B的出 气口导通,气缸通过电磁阀B的进气口Ⅱ排气,阀门A关闭;另一组串联的电磁阀C和电磁阀D中,气缸通过电磁阀D的进气口Ⅱ排气,阀门B关闭;
步骤2.3、阀门A和阀门B任一阀门开启时,系统管路导通:电磁阀A和电磁阀B均带电 时,压缩空气经气源由电磁阀B的进气口Ⅱ进入气缸,阀门A开启,系统管路导通;或电磁阀C和电磁阀D均带电时,压缩空气经气源由电磁阀D的进气口Ⅱ进入气缸,阀门B开启, 系统管路导通。
本发明的有益效果是:本发明提出一种高可靠性电磁阀控制系统,针对阀门保护关闭的 场景,采用双电磁阀并联,并且双阀门串联;针对阀门保护开启的场景,采用双电磁阀串联, 并且双阀门并联。相比单电磁阀控制回路,减少了系统误动风险,相比双电磁控制回路,减 少了拒动风险,最终提高了系统的可靠性。本发明可应用于火力发电等工业领域,用于提高 采用电磁阀控制的重要阀门的动作可靠性。
附图说明
图1为单电磁阀气动阀控制回路图;
图2为双电磁阀并联气动阀控制回路图;
图3为双电磁阀并联双关断阀串联控制回路图;
图4为双电磁阀串联双关断阀并联控制回路图。
附图标记说明:气源1、进气口Ⅰ2、进气口Ⅱ3、出气口4、气缸5、电磁阀6、阀门7、 电磁阀A8、电磁阀A的进气口Ⅰ9、电磁阀A的进气口Ⅱ10、电磁阀A的出气口11、电磁阀 B12、电磁阀B的进气口Ⅰ13、电磁阀B的进气口Ⅱ14、电磁阀B的出气口15、阀门A16、阀 门B17、电磁阀C18、电磁阀D19、系统管路20。
具体实施方式
下面结合实施例对本发明做进一步描述。下述实施例的说明只是用于帮助理解本发明。 应当指出,对于本技术领域的普通人员来说,在不脱离本发明原理的前提下,还可以对本发 明进行若干修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
实施例1:
一种高可靠性电磁阀控制系统,包括双电磁阀双阀门的配置,双电磁阀双阀门的配置中 设有两组电磁阀、阀门A16和阀门B17,其中一组电磁阀包括电磁阀A8和电磁阀B12,另一 组电磁阀包括电磁阀C18和电磁阀D19;
如图3所示,当电磁阀保护关停机时:电磁阀A8和电磁阀B12并联后一端接入气源1, 另一端接入气缸5,气缸5连接阀门A16;电磁阀C18和电磁阀D19并联后一端接入气源1,另一端接入另一个气缸5,另一个气缸5连接阀门B17;阀门A16和阀门B17串联后接入系统管路20;电磁阀A8、电磁阀B12、电磁阀C18和电磁阀D19中任一电磁阀故障导致失电时: 气缸5管路处于导通状态,对应的阀门A16或阀门B17保持开状态,系统管路20导通;电磁 阀A8、电磁阀B12、电磁阀C18和电磁阀D19中所有电磁阀均失电时:阀门A16和阀门B17 均关闭,系统管路20不导通;
如图4所示,当电磁阀保护开停机时,电磁阀A8和电磁阀B12串联后一端接入气源1, 另一端接入气缸5,气缸5连接阀门A16;电磁阀C18和电磁阀D19串联后一端接入气源1,另一端接入另一个气缸5,另一个气缸5连接阀门B17;阀门A16和阀门B17并联后接入系统管路20;机组正常运行时:电磁阀A8、电磁阀B12、电磁阀C18和电磁阀D19均处于失电状 态,阀门A16和阀门B17均关闭;电磁阀A8和电磁阀B12均带电,或电磁阀C18和电磁阀 D19均带电,或电磁阀A8、电磁阀B12、电磁阀C18和电磁阀D19均带电时,系统管路20导 通。
实施例2:
采用两位三通式电磁阀,如图1所示,电磁阀带电时进气口Ⅰ2和出气口4导通,失电时出气口4和进气口Ⅱ3导通。压缩空气经电磁阀及仪表管进入阀门下气缸5开启阀门,气缸5失气时,阀门关闭;
一、当电磁阀失电系统保护动作时,假设电磁阀误动概率为Q(0 当机组或系统的阀门保护关停机,电磁阀常带电时,本实施例针对这种情况采用如图3 所示的双电磁阀并联,并且双阀门串联的电磁阀控制系统;将电磁阀A8和电磁阀B12并联后 一端接入气源1,另一端接入气缸5,气缸5连接阀门A16;将电磁阀C18和电磁阀D19并联 后一端接入气源1,另一端接入另一个气缸5,另一个气缸5连接阀门B17;阀门A16和阀门 B17串联后接入系统管路20; 机组正常运行时,阀门A16和阀门B17处于开启状态,任一阀门关闭则管路切断,系统 停运;机组正常运行时电磁阀均带电,电磁阀A的进气口Ⅰ9与电磁阀A的出气口11导通,电磁阀A的出气口11连接电磁阀B的进气口Ⅱ14,电磁阀B的进气口Ⅰ13和电磁阀B的出 气口15导通,压缩空气经过气源1经过电磁阀B的进气口Ⅰ13、电磁阀B的出气口15进入 气缸5;阀门A16保持开状态;电磁阀C18和电磁阀D19在机组正常运行时的工作模态参照 电磁阀A8和电磁阀B12; 电磁阀A8、电磁阀B12、电磁阀C18和电磁阀D19中任一电磁阀故障导致失电时,气缸 5的管路仍导通,阀门A16和阀门B17保持开状态,系统管路20导通:若电磁阀A8带电, 电磁阀B12失电,则电磁阀A的进气口Ⅰ9与电磁阀A的出气口11导通,电磁阀B的进气口 Ⅱ14与电磁阀B的出气口15导通,电磁阀A的出气口11和电磁阀B的进气口Ⅱ14相连通, 气缸5依然处于进气状态,阀门A16(气动阀)开启;若电磁阀A8失电,电磁阀B12带电, 则电磁阀A的进气口B10与电磁阀A的出气口11导通,电磁阀B的进气口Ⅰ13与电磁阀B 的出气口15导通,气缸5依然处于进气状态,阀门A16(气动阀)开启; 每组并联的电磁阀中所有电磁阀均失电时,则该组电磁阀失电:只有当电磁阀A8失电, 电磁阀B12也失电的时候,电磁阀A的进气口B10、电磁阀A的出气口11导通,电磁阀B的 进气口Ⅱ14、电磁阀B的出气口15导通,气缸5排气,阀门A16关闭,管路切断;当两组电磁阀其中一组失电时,对应的阀门关闭;阀门A16和阀门B17中任一阀门关闭,系统管路20切断,减少了系统的拒动风险。 上述双电磁阀并联,并且双阀门串联的电磁阀控制系统误动概率为2Q 二、当电磁阀得电系统进行保护动作时,假设电磁阀误动概率为R(0 当机组或系统的阀门保护开停机,电磁阀常失电时,本实施例采用如图4所示的双电磁 阀串联,并且双阀门并联的电磁阀控制系统;电磁阀A8和电磁阀B12串联后一端接入气源1, 电磁阀A的进气口Ⅰ9接入气源1,电磁阀A的出气口11接入电磁阀B的进气口Ⅰ13,电磁 阀B的出气口15连接电磁阀B的进气口Ⅰ13,电磁阀B的出气口15连接气缸5,气缸5连 接阀门A16;电磁阀C18和电磁阀D19串联后一端接入气源1,另一端接入另一个气缸5,另 一个气缸5连接阀门B17;阀门A16和阀门B17并联后接入系统管路20; 机组正常运行时,电磁阀A8带电和电磁阀B12均失电时,阀门A16和阀门B17均处于关 闭状态;电磁阀A的进气口Ⅱ10和电磁阀A的出气口11导通,电磁阀B的进气口Ⅱ14和电磁阀B的出气口15导通,气缸5通过电磁阀B的进气口Ⅱ14排气,阀门A16关闭;另一组 串联的电磁阀C18和电磁阀D19中,气缸5通过电磁阀D19的进气口Ⅱ排气,阀门B17关闭, 电磁阀C18和电磁阀D19的情况与之相同。 机组正常运行时,阀门A16和阀门B17任一阀门开启时,系统管路20导通,减少了系统 的拒动风险,电磁阀控制系统停运;电磁阀A8带电,电磁阀B12不带电时,电磁阀A的进气口Ⅰ9和电磁阀A的出气口11导通,磁阀B的进气口Ⅱ14和电磁阀B的出气口15导通,气 缸5不进气,阀门A16依然关闭。电磁阀A8不带电,电磁阀B12带电时,电磁阀A的进气口 Ⅱ10和电磁阀A的出气口11导通,电磁阀B的进气口Ⅰ13和电磁阀B的出气口15导通;气 缸5不进气,阀门A16依然关闭,电磁阀C18和电磁阀D19的情况与之相同。 机组正常运行时,电磁阀A8和电磁阀B12同时带电情况下,电磁阀A的进气口Ⅰ9和电 磁阀A的出气口11导通,电磁阀A的出气口11和电磁阀B的进气口Ⅰ13导通,电磁阀B的 进气口Ⅰ13导通和电磁阀B的出气口15导通,气缸5进气,阀门A16开启,系统管路20导 通。压缩空气经气源1由电磁阀B的进气口Ⅱ14进入气缸5,阀门A16开启,系统管路20导 通;或电磁阀C18和电磁阀D19均带电时,压缩空气经气源1由电磁阀D19的进气口Ⅱ进入 气缸5,阀门B17开启,系统管路20导通; 上述双电磁阀串联,并且双阀门并联的电磁阀控制系统的误动概率为2R
- 一种高可靠性电磁阀控制系统
- 一种高可靠性零泄漏的刀闸式电磁阀