一种山地果园机械化作业整地方法
文献发布时间:2023-06-19 11:45:49
技术领域
本申请涉及农业开垦技术领域,特别是涉及一种山地果园机械化作业整地方法。
背景技术
近年来,随着我国农业产业结构的调整,林果种植面积的不断扩大,而我国可耕地面积有限,坡地很早就被开垦利用。坡地果园排水良好,光照充足,通风条件良好,果农种植果树非常有利。但是其较大的土地坡度和种植密度不利于一般农机具的使用,因此坡地果园机械化作业水平远远落后于平地。在坡地果园经营中,果农依靠手工劳作,劳动强度大,工作效率低,并且近年来劳动力大量流向城市务工,农村大多是老人和小孩,中年人很少,有必要实现果园的机械化作业。果园作业机械化可以实现果园的规范化管理,取代大量的人工作业,大幅减轻果农的劳动强度,提高生产效率,节约劳动成本,提高经济效益,同时还能减少林果病虫害的发生,提高果品品质。
目前山地果园均是传统建园法,条件好的地方新建了轨道,便于运输肥料和果实。然而,现有对坡面进行改造实现机械化的方法,只能实现主干道对果树和果实进行运输,难以实现对果树进行机械化施肥、用药等栽培管理和难以实现对果实进行机械化采摘。
发明内容
基于此,有必要针对上述技术问题,提供一种能够实现坡地机械化作业的一种山地果园机械化作业整地方法。
一种山地果园机械化作业整地方法,所述方法包括:
对坡度小于预设角度的山坡开梯,形成多个横向梯面,所述梯面朝上;
建设与梯面交叉从山坡脚到山坡顶的主干道;
在所述梯面上修建机械作业道和起垄,所述机械作业道和所述垄并排从所述梯面的一端延伸至另一端,垄面用于栽植果树;
所述梯面与梯面之间的机械作业道连接呈“S”型(便于作业机械转弯),所述机械作业道与所述主干道相连。
在其中一个实施例中,所述山坡为单面坡;所述主干道呈之字形,宽4~5m,所述主干道一端与公路相通;所述机械作业道一端与所述主干道连接,另一端与相邻梯面的机械作业道通过梯面与梯面之间的通道连接,所述机械作业道宽 2~3m,用于人行走和小型农业机械行驶作业。
在其中一个实施例中,所述山坡为山丘;所述主干道从山坡脚斜向到达山坡顶,所述主干道宽4~5m,所述主干道一端与公路相通;所述机械作业道宽2~ 3m(整个梯宽不小于3m),两个相邻梯面之间的机械作业道通过所述主干道连接,用于人行走和小型农业机械行驶作业。
在其中一个实施例中,所述预设角度为35°。
在其中一个实施例中,所述梯面略向内侧倾斜,以减少流水的冲涮力度。
在其中一个实施例中,所述山地果园机械化作业整地方法还包括:根据整个果园的地形,在有利于收集雨水的地方设置蓄水池;所述蓄水池的底部预先埋设排水管道,排水管口设置开关。
在其中一个实施例中,所述山地果园机械化作业整地方法还包括:每个梯面的所述垄和所述机械作业道各为1条,所述梯面宽3~4m,开梯时将表层熟土刨到所述梯面外侧成垄,所述垄宽1m、垄高50~80cm;在果树栽植的位置用挖掘机将土挖松,控制果树株距1.5~3.5m(依据不同类型的果树冠幅而定株距),在垄面上定植1行,定植在距离梯外壁小于或等于0.5m处,果树距梯最内壁大于或等于2.5m,控制果树的密度每750株/hm
在其中一个实施例中,所述山地果园机械化作业整地方法还包括:采用生草化栽培方式对土壤进行管理。
在其中一个实施例中,所述采用生草化栽培方式对土壤进行管理包括:在果树行间种植多年生牧草或自然生草;在树盘内保持清耕,树盘以外保留杂草生长,适时刈割;其中,刈割频率为一年2~4次,以减少与果树的营养竞争,刈割下的草散铺在果园中用于保湿抗旱。
在其中一个实施例中,所述山地果园机械化作业整地方法还包括:每个梯面的所述垄为2条、机械作业道为1条,所述机械作业道在两条所述垄之间,所述梯面宽4~6m,开梯时将表层熟土刨到所述梯面两侧成垄,所述垄宽1m、垄高50~80cm;在果树栽植的位置用挖掘机将土挖松,控制果树株距1.5~3.5m,在垄面上定植1行,控制果树的密度每750株/hm
上述山地果园机械化作业整地方法,通过设置主干道和机械作业道,能够保证农业机械进入到坡地果园进行作业,实现果园机械化作业;并且通过梯面与梯面之间的机械作业道连接呈“S”型(便于作业机械转弯),能够保证农用机械在梯面之间按照“S”型行走,不需要重复路线,提高作业效率。
附图说明
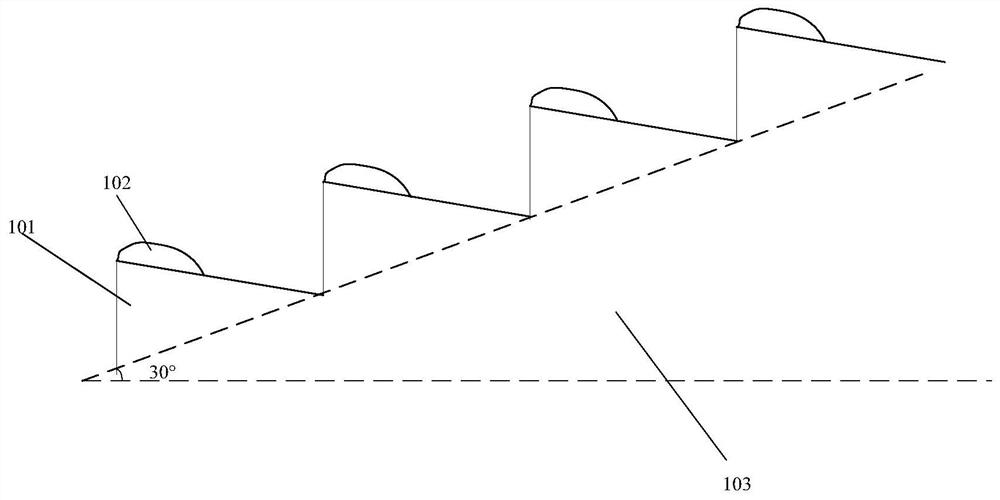
图1为一个实施例中山坡开梯截面示意图;
图2为一个实施例中单面坡开梯示意图;
图3为另一个实施例中单面坡开梯示意图;
图4为一个实施例中山丘开梯示意图。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
在一个实施例中,如图1所示,提供了一种山地果园机械化作业整地方法,所述方法包括:对坡度小于预设角度的山坡开梯,形成多个横向梯面,所述梯面朝上;建设与梯面交叉从山坡脚到山坡顶的主干道;在所述梯面上修建机械作业道和起垄,所述机械作业道和所述垄并排从所述梯面的一端延伸至另一端,垄面用于栽植果树;所述梯面与梯面之间的机械作业道连接呈“S”型(便于作业机械转弯),所述机械作业道与所述主干道相连。
其中,预设角度可以为30°也可以为35°,在图1中,选择的预设角度为 30°。通过对山坡103开梯得到多级梯101,并形成多个横向梯面。如图2、图 3和图4所示,在山坡103设置了一条从山坡脚到山坡顶的主干道104,主干道 104与梯面交叉。其中,主干道104可为“之”字形,或为“S”型,或者为从山坡脚倾斜向上到达山坡顶,以减缓主干道104的倾斜度,以便于车辆行走。
例如,所述梯面内侧修建机械作业道如图2、图3和图4所示的虚线箭头指向方式所示,所述梯面外侧起垄102用于栽植果树,在图2、图3和图4中梯面与梯面之间的机械作业道连接呈大“S”型,能够便于农用机械在梯面与梯面之间行走;其中,所述梯面内侧为靠近山坡的一侧,所述梯面外侧为远离山坡的一侧。
上述山地果园机械化作业整地方法中,通过设置主干道和机械作业道,能够保证农业机械进入到坡地果园进行作业,实现果园机械化作业;并且通过梯面与梯面之间的机械作业道连接呈“S”型(便于作业机械转弯),能够保证农用机械在梯面之间按照“S”型行走,不需要重复路线,提高作业效率。
在其中一个实施例中,如图2和图3所示,所述山坡103为单面坡;所述主干道104呈之字形,宽4~5m,所述主干道104一端与公路相通;所述机械作业道一端与所述主干道104连接,另一端与相邻梯面的机械作业道通过梯面与梯面之间的通道连接,所述机械作业道宽2~3m,用于人行走和小型农业机械行驶作业。
其中,在图2和图3中,梯面与梯面之间的机械作业道靠近山坡边缘105。在图3中,设置了梯面小道,如图3中虚线箭头所示,梯面小道可设置宽2m。便于履带式田园管理机开沟施肥、打药、抗旱等农事作业。
本实施例中,设计果园道路由主干道、机械作业道组成,便于小型机械化作业,使小型耕作机能开到每一株树旁边,施肥、喷施农药、抗旱灌水、果实的输送全部依靠机械完成,最大限度减少劳动力的投入,降低成本,提高经济效益,使种植户丰产增收。
在其中一个实施例中,所述山坡为山丘;所述主干道从山坡脚斜向到达山坡顶,所述主干道宽4~5m,所述主干道一端与公路相通;所述机械作业道宽2~ 3m(整个梯宽不小于3m),两个相邻梯面之间的机械作业道通过所述主干道连接,用于人行走和小型农业机械行驶作业。
其中,如图3所示,山坡为山丘103,在山丘103形成环绕山丘的梯101,所述主干道104从山坡脚斜向到达山坡顶,以减缓运输车辆上山的坡度,所述主干道104的下端与公路相通。农用机械在机械作业道行走如图4中箭头所示。
在其中一个实施例中,所述预设角度为35°。
在其中一个实施例中,所述梯面略向内侧倾斜,以减少流水的冲涮力度。其中,所示梯面向内侧倾斜的角度小于5°。
在其中一个实施例中,所述山地果园机械化作业整地方法还包括:根据整个果园的地形,在有利于收集雨水的地方设置蓄水池;所述蓄水池的底部预先埋设排水管道,排水管口设置开关。
其中,根据整个果园根据地形,在有利于收集雨水的地方尽可能设置较大蓄水池,雨季时能蓄积更多的雨水。蓄水池的底部预先埋设排水管道,排水管口设置开关,方便用水,为干旱季节灌水、果园打药及液态施肥提供用水保障。
在其中一个实施例中,其特征在于,所述山地果园机械化作业整地方法还包括:每个梯面的所述垄和所述机械作业道各为1条,所述梯面宽3~4m,开梯时将表层熟土刨到所述梯面外侧成垄,所述垄宽1m、垄高50~80cm;在果树栽植的位置用挖掘机将土挖松,控制果树株距1.5~3.5m,在垄面上定植1行,定植在距离梯外壁小于或等于0.5m处,果树距梯最内壁2.5m以上,控制果树的密度每750株/hm
其中,开梯时将表层熟土刨到梯面外侧成垄,不挖栽植坑,在要栽植的位置用挖机挖松即可。果树树苗栽植在垄的中央,距离梯外壁约0.5m处,增加了耕作层厚度,有利于根系生长,树高控制在2m以下,内侧为小型机械的机械作业道。其中,果树为乔化栽培的猕猴桃,控制猕猴桃的栽培株距为1.5m;或者果树为柚株,控制柚株的栽培株距为3m。
其中,本实施例中果树的种植方式,保证不减产的前提下尽量加大果树之间的行距,实施果园机械化作业。
在其中一个实施例中,所述山地果园机械化作业整地方法还包括:采用生草化栽培方式对土壤进行管理。
在其中一个实施例中,所述采用生草化栽培方式对土壤进行管理包括:在果树行间种植多年生牧草或自然生草;在树盘内保持清耕,树盘以外保留杂草生长,适时刈割;其中,刈割频率为一年2~4次,以减少与果树的营养竞争,刈割下的草散铺在果园中以用于保湿抗旱。
本申请一种山地果园机械化作业整地方法,根据山坡建设果园,坡度≦ 35°,能使小型农业机械开到每株果树旁边,方便施肥、打药、除草、抗旱等作业,节省劳动力,降低成本,提高工作效率,可实现一个人轻松管理66700m
在其中一个实施例中,所述山地果园机械化作业整地方法还包括:每个梯面的所述垄为2条、机械作业道为1条,所述机械作业道在两条所述垄之间,所述梯面宽4~6m,开梯时将表层熟土刨到所述梯面两侧成垄,所述垄宽1m、垄高50~80cm;在果树栽植的位置用挖掘机将土挖松,控制果树株距1.5~3.5m,在垄面上定植1行,控制果树的密度每750株/hm
其中,开梯时将表层熟土刨到梯面外侧和内侧成垄,不挖栽植坑,在要栽植的位置用挖机挖松即可。果树树苗栽植在垄的中央,距离梯外壁约0.5m处或者距离梯内壁约0.5m,增加了耕作层厚度,有利于根系生长,树高控制在2m 以下,内侧为小型机械的机械作业道。其中,果树为乔化栽培的猕猴桃,控制猕猴桃的栽培株距为1.5m;或者果树为柚株,控制柚株的栽培株距为3m。
本实施例中,在山坡较缓的区域,可以增加梯面的宽度,每个梯面开设两条垄以减少开梯的密度,从而减少开梯时的机械作业时间。
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 一种山地果园机械化作业整地方法
- 一种东北黑土农田机械化高标准秋整地方法