一种带液压支腿工程车辆的智能调平系统及方法
文献发布时间:2023-06-19 12:19:35
技术领域
本发明一种带液压支腿工程车辆的智能调平系统及方法,属于带液压支腿工程车辆智能调平系统技术领域。
背景技术
工程车辆调平一直是工程车辆提高机动性和作业安全性的关键技术,目前市场以手动操作液压阀进行调平,调平度依赖人工观察为主,部分中高端工程车辆和特种车辆采用电业一体化支腿调平系统,通过系统检测各个腿的油缸压力和倾斜传感器进行控制或则通过检测油缸伸出长度和倾斜传感器进行系统调平控制,这几种调平控制系统适用于场地基本平整的作业场所,基本靠操作人员首先进行场地观察后才能进行调平作业。对于复杂作业场地,调平基本靠操作人员手动进行调平控制,适应性有限。
发明内容
本发明为了克服现有技术中存在的不足,所要解决的技术问题为:提供一种带液压支腿工程车辆的智能调平系统硬件结构的改进。
为了解决上述技术问题,本发明采用的技术方案为:一种带液压支腿工程车辆的智能调平系统,包括工程车辆,所述工程车辆的车架上固定安装有支腿横移机构,所述支腿横移机构通过液压控制系统进行支腿伸缩控制,所述液压控制系统包括液压伺服控制器和液压伺服阀,所述液压伺服控制器通过串口总线与总控制器进行通信,所述总控制器通过以太网总线与人机界面进行通信;
所述总控制器通过导线分别与液压压力传感器KP、位置传感器SQ、测长传感器SS、倾斜传感器FX和FY、微波测距传感器FS相连,控制动作指令由人机界面通过以太网上传到主控制器,主控制器根据传感器反馈的数据及预设的动作指令,通过串口发出控制信号到液压伺服控制器,液压伺服控制器根据控制信号控制液压伺服阀动作,从而控制支腿油缸完成伸缩动作到指定位置,实现对车辆的自动调平。
所述支腿横移机构包括安装架、支腿,所述支腿通过安装架固定在工程车辆车架的四个位置,所述安装架包括安装座、横移滑轨和横移油缸,横移油缸伸缩带动支腿沿横移滑轨水平移动;
所述支腿包括底座、支腿油缸,所述底座用于固定支腿油缸,所述支腿油缸通过缸杆伸缩实现支撑点车架水平位置调整。
所述液压压力传感器KP固定安装在支腿油缸的无杆腔端,实时监测支腿油缸的受力情况,并将数据反馈至主控制器;
所述位置传感器SQ固定安装在支腿油缸的无杆腔的端部,检测支腿油缸完全收回状态,并将数据反馈至主控制器;
所述测长传感器SS固定安装在支腿油缸的顶部,检测支腿油缸伸缩位置距离,并将支腿油缸伸缩速度和位置数据反馈至主控制器;
所述倾斜传感器FX和FY固定安装在车架中心处,用于检测工程车辆X方向和Y方向的倾斜数据;
所述微波测距传感器FS固定安装在液压支腿一侧,用于检测支腿到地面的距离,并将数据反馈至主控制器。
所述主控制器还通过导线与主令开关SA、主令开关SB相连,所述主令开关SA为支腿油缸手动控制开关,用于手动控制支腿油缸的伸缩,实现手动车辆调平或支腿收回;
所述主令开关SB为横移油缸控制开关,用于手动横移油缸的伸缩,调整各个支腿的左右水平位置。
一种带液压支腿工程车辆的智能调平方法,包括如下步骤:
步骤一:系统上电初始化;
步骤二:通过人机界面开启控制系统进行车辆调平,安装在车辆不同位置的微波测距传感器FS将检测数据上传到主控制器,系统根据反馈数据,综合支腿油缸允许伸缩长度范围,计算出每个支腿距离地面的距离;
步骤三:当支腿距离地面的距离大于支腿作业范围时,系统通过人机界面给出需要垫枕木的信息,直到操作人员将枕木垫起到满足支腿调平作业的范围,满足支腿调平作业,系统提示可以进行下一步作业,操作人员通过人机界面启动调平作业;
步骤四:系统首先按照计算的支腿到地面的距离控制支腿油缸伸出长度,测长传感器SS对应检测检测支腿油缸伸出长度数值,直到支腿油缸液压压力传感器KP检测到支腿油缸承压达到预设值;
步骤五:系统重新读取各个微波测距传感器FS和测长传感器SS对应检测支腿油缸伸出长度数值,同时读取倾斜传感器FX和FY分别检测车辆在X方向和Y方向的倾斜状态,系统根据各个传感器反馈信息,按预设模型计算出车辆倾斜状态,并按设定给出调平控制方案,控制各个支腿按调平控制方案完成自动调平,直到倾斜传感器FX和FY检测数值满足工程车辆调平作业要求。
所述步骤二在车辆开始调平前,通过操作人员手动控制主令开关SA和SB实现对支腿油缸和横移油缸手动控制,调整各个支腿与地面的距离及各个支腿的水平位置,调整好后通过人机界面开启控制系统进行车辆调平。
本发明相对于现有技术具备的有益效果为:本发明提供的本发明采用预测每个支腿到地面的距离,在人机界面输出相应信息,提示该作业点是否超过支腿的作业范围,是否需要垫枕木等辅助支撑,具备调平作业条件,提示操作人员启动调平,根据预测位置,控制对应支腿伸出对应长度,根据当前每个支腿反馈的压力信息,综合倾斜传感器信息,判断每个支腿的受力情况和车辆倾斜状态,系统经过综合各个传感器信息以及预设控制信息进行车辆调平,实用性好,效率高。
附图说明
下面结合附图对本发明做进一步说明:
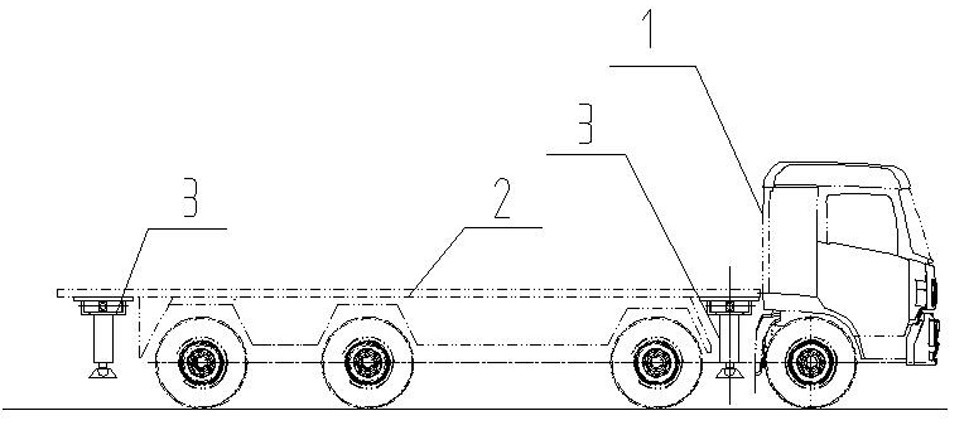
图1为本发明的结构示意图;
图2为图1的俯视图;
图3为从图1看到的支腿横移机构的结构示意图;
图4为从图2看到的支腿横移机构的结构示意图;
图5为本发明支腿的结构示意图;
图6为本发明控制系统的主回路电路结构示意图;
图7、图8、图9、图10、图11、图12为本发明控制系统的控制回路电路结构示意图;
图13为本发明控制方法的流程图;
图中:1为工程车辆、2为车架、3为支腿横移机构、4为安装座、5为横移油缸、6为支腿、7为横移滑轨、8为支腿油缸、9为底座。
具体实施方式
如图1至图13所示,本发明一种带液压支腿工程车辆的智能调平系统,包括工程车辆,所述工程车辆的车架上固定安装有支腿横移机构,所述支腿横移机构通过液压控制系统进行支腿伸缩控制,所述液压控制系统包括液压伺服控制器和液压伺服阀,所述液压伺服控制器通过串口总线与总控制器进行通信,所述总控制器通过以太网总线与人机界面进行通信;
所述总控制器通过导线分别与液压压力传感器KP、位置传感器SQ、测长传感器SS、倾斜传感器FX和FY、微波测距传感器FS相连,控制动作指令由人机界面通过以太网上传到主控制器,主控制器根据传感器反馈的数据及预设的动作指令,通过串口发出控制信号到液压伺服控制器,液压伺服控制器根据控制信号控制液压伺服阀动作,从而控制支腿油缸完成伸缩动作到指定位置,实现对车辆的自动调平。
所述支腿横移机构包括安装架、支腿,所述支腿通过安装架固定在工程车辆车架的四个位置,所述安装架包括安装座、横移滑轨和横移油缸,横移油缸伸缩带动支腿沿横移滑轨水平移动;
所述支腿包括底座、支腿油缸,所述底座用于固定支腿油缸,所述支腿油缸通过缸杆伸缩实现支撑点车架水平位置调整。
所述液压压力传感器KP固定安装在支腿油缸的无杆腔端,实时监测支腿油缸的受力情况,并将数据反馈至主控制器;
所述位置传感器SQ固定安装在支腿油缸的无杆腔的端部,检测支腿油缸完全收回状态,并将数据反馈至主控制器;
所述测长传感器SS固定安装在支腿油缸的顶部,检测支腿油缸伸缩位置距离,并将支腿油缸伸缩速度和位置数据反馈至主控制器;
所述倾斜传感器FX和FY固定安装在车架中心处,用于检测工程车辆X方向和Y方向的倾斜数据;
所述微波测距传感器FS固定安装在液压支腿一侧,用于检测支腿到地面的距离,并将数据反馈至主控制器。
所述主控制器还通过导线与主令开关SA、主令开关SB相连,所述主令开关SA为支腿油缸手动控制开关,用于手动控制支腿油缸的伸缩,实现手动车辆调平或支腿收回;
所述主令开关SB为横移油缸控制开关,用于手动横移油缸的伸缩,调整各个支腿的左右水平位置。
一种带液压支腿工程车辆的智能调平方法,包括如下步骤:
步骤一:系统上电初始化;
步骤二:通过人机界面开启控制系统进行车辆调平,安装在车辆不同位置的微波测距传感器FS将检测数据上传到主控制器,系统根据反馈数据,综合支腿油缸允许伸缩长度范围,计算出每个支腿距离地面的距离;
步骤三:当支腿距离地面的距离大于支腿作业范围时,系统通过人机界面给出需要垫枕木的信息,直到操作人员将枕木垫起到满足支腿调平作业的范围,满足支腿调平作业,系统提示可以进行下一步作业,操作人员通过人机界面启动调平作业;
步骤四:系统首先按照计算的支腿到地面的距离控制支腿油缸伸出长度,测长传感器SS对应检测检测支腿油缸伸出长度数值,直到支腿油缸液压压力传感器KP检测到支腿油缸承压达到预设值;
步骤五:系统重新读取各个微波测距传感器FS和测长传感器SS对应检测支腿油缸伸出长度数值,同时读取倾斜传感器FX和FY分别检测车辆在X方向和Y方向的倾斜状态,系统根据各个传感器反馈信息,按预设模型计算出车辆倾斜状态,并按设定给出调平控制方案,控制各个支腿按调平控制方案完成自动调平,直到倾斜传感器FX和FY检测数值满足工程车辆调平作业要求。
所述步骤二在车辆开始调平前,通过操作人员手动控制主令开关SA和SB实现对支腿油缸和横移油缸手动控制,调整各个支腿与地面的距离及各个支腿的水平位置,调整好后通过人机界面开启控制系统进行车辆调平。
本发明提供的带液压支腿工程车辆智能调平系统包括内置测长传感器SS、液压压力传感器KP和位置传感器SQ的液压支腿、微波测距传感器FS、支腿横移机构3、车架2、液压伺服控制器、液压伺服阀、PLC控制器、主令开关等控制元件。
图1为安装示意图。支腿横移机构3带支腿6分四个支点分布在工程车辆1的车架2的四个位置,通过安装架固定在车架2上,支腿横移机构3将支腿6按需要推送到要求位置,支腿按控制系统指令要求进行伸缩,实现车架调平;倾斜传感器FX和FY安装在车架2中心位置,可以实时检测车架是否满足作业水平度要求,微波测距传感器FS配合倾斜传感器FX、FY和测长传感器SS完成系统调平控制。微波测距传感器FS安装在支腿6附近,用于检测该点到地面距离。
本发明的腿横移机构3通过安装架固定在在工程车辆1的车架2上,安装架由横移滑轨7和横移油缸5以及安装座4等组成,通过安装架固定在车架2上,横移油缸5伸缩带动支腿6沿横移滑轨7左右水平移动,支腿横移机构2将支腿6按需要推送到要求位置,支腿6按控制系统指令要求进行伸缩,实现车架调平;支腿6由底座9、支腿油缸8以及安装在油缸上的液压压力传感器KP、位置传感器SQ、测长传感器SS等组成。支腿底座9用于固定支腿油缸8和横移机构,支腿横移机构3带动油缸进行左右位置调整;支腿油缸8通过缸杆伸缩实现本支撑点车架水平位置调整;液压压力传感器KP安装在支腿油缸8无杆腔端,可以实时监测本支腿油缸的受力情况,为系统检测车架支撑点受力情况,系统根据数据检测本支撑点是否超过安全值,为工程车调平和作业提供安全检测,提高工程车作业安全性和可靠性;位置传感器SQ安装在支腿油缸8无杆腔端端部,用于检测支腿油缸完全收回状态,当油缸完全收回时,支腿油缸活塞回到终止位并触发位置传感器SQ,当所有支腿油缸位置传感器SQ都被触发,系统将对应测长传感器SS置零校正,避免由于机械误差或形变导致系统误差,从而影响系统调平精度,同时所有支腿油缸8的位置传感器SQ都被触发,系统才允许车辆行走,避免由于支腿没有完全收回导致的车辆损毁或则事故发生;测长传感器SS为激光测长传感器,安装在支腿油缸8顶部,直接检测支腿油缸伸缩位置距离,为系统提供油缸伸缩速度和位置反馈,配合安装在车架2中心位置的倾斜传感器FX和FY,同时读取微波测距传感器FS、倾斜传感器FX和FY分别检测车辆在X方向和Y方向的倾斜状态,系统根据各个传感器反馈信息,按预设模型计算出车辆倾斜状态,并按系统设定给出调平控制方案,控制各个支腿按调平控制方案完成自动调平,直到倾斜传感器FX和FY检测数值满足工程车辆调平作业要求。
本发明采用PLC作为主控制器,通过倾斜传感器FX和FY分别检测车辆在X方向和Y方向的倾斜状态;通过液压压力传感器KP检测各个支腿油缸8承压;通过测长传感器SS检测油缸伸出长度;通过微波测距传感器FS检测每个支腿6安装位置距离地面的距离;位置传感器SQ为油缸位置传感器,用于检测油缸活塞收回初始位置;主令开关SA为支腿油缸手动控制开关;主令开关SB为支腿水平伸缩油缸控制开关。
本发明具体采用采用西门子PLC S300作为主控制器,配套的西门子触摸屏HMI作为人机控制界面,液压控制采用常规液压伺服控制器和液压伺服阀作为执行控制元件,HMI通过以太网进行连接,以太网连接可以使人机HMI安装在需要的地方,不受通讯距离约束,液压伺服控制器与主控制器PLC采用RS232通讯。控制动作指令由人机HMI通过以太网上传到主控制器PLC,主控制器PLC根据预设的程序,通过RS232通讯口发出控制信号到液压伺服控制器,液压伺服控制器根据控制信号控制液压伺服阀动作,从而控制支腿油缸完成伸缩动作到指定位置。
图6-图12为本发明的电路控制图,SA为主令开关,用于手动控制支腿油缸伸缩,实现手动车辆调平或支腿收回。位置传感器SQ安装在支腿油缸无杆腔端端部,用于检测支腿油缸完全收回状态,当油缸完全收回时,支腿油缸活塞回到终止位并触发位置传感器SQ,当所有支腿油缸位置传感器SQ都被触发,系统将对应测长传感器SS置零校正,避免由于机械误差或形变导致系统误差,从而影响系统调平精度,同时所有支腿油缸位置传感器SQ都被触发,只有系统才允许车辆行走,避免由于支腿没有完全收回导致的车辆损毁或则事故发生。SB为主令开关,用于手动控制支腿水平伸缩油缸控制开关,车辆开始调平前,由操作人员手动控制主令开关SB,操控支腿横移机构2,调整各个支腿6的左右水平位置,调整好后,通过HMI人机界面开启控制系统进行车辆调平。
本发明的控制流程为:车辆开始调平前,由操作人员手动控制主令开关SB,操控支腿横移机构3,调整各个支腿6的左右水平位置,调整好后,通过HMI人机界面开启控制系统进行车辆调平,安装在车辆不同位置的微波测距传感器FS将检测数据上传到PLC控制器,系统根据反馈数据,综合支腿油缸允许伸缩长度范围,计算出每个支腿距离地面的距离,当该距离大于支腿作业范围时,系统通过HMI人机界面给出需要垫枕木的信息,直到操作人员将枕木垫起到满足支腿调平作业的范围,满足支腿调平作业,系统提示可以进行下一步作业,操作人员通过HMI人机界面启动调平作业,系统首先按照计算的支腿到地面的距离控制支腿油缸伸出长度,测长传感器SS对应检测检测支腿油缸伸出长度数值,直到支腿油缸液压压力传感器KP检测到支腿油缸承压达到预设值,说明支腿油缸已经触地,此时,系统重新读取各个微波测距传感器FS和测长传感器SS对应检测检测支腿油缸伸出长度数值,同时读取倾斜传感器FX和FY分别检测车辆在X方向和Y方向的倾斜状态,系统根据各个传感器反馈信息,按预设模型计算出车辆倾斜状态,并按系统设定给出调平控制方案,控制各个支腿按调平控制方案完成自动调平,直到倾斜传感器FX和FY检测数值满足工程车辆调平作业要求。
本发明通过FS微波传感器进行支撑点距离预判,相对于目前常规系统更具有可操作性;将支腿油缸伸缩长度和受力信号有机结合,使系统更具有实用性;根据倾角传感器、支腿伸缩长度以及受力情况,由系统直接给出调平控制方案,效率高,适用性强,具有很好的市场推广价值。
关于本发明具体结构需要说明的是,本发明采用的各部件模块相互之间的连接关系是确定的、可实现的,除实施例中特殊说明的以外,其特定的连接关系可以带来相应的技术效果,并基于不依赖相应软件程序执行的前提下,解决本发明提出的技术问题,本发明中出现的部件、模块、具体元器件的型号、连接方式除具体说明的以外,均属于本领域技术人员在申请日前可以获取到的已公开专利、已公开的期刊论文、或公知常识等现有技术,无需赘述,使得本案提供的技术方案是清楚、完整、可实现的,并能根据该技术手段重现或获得相应的实体产品。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 一种带液压支腿工程车辆的智能调平系统及方法
- 钻机液压支腿自动调平系统及其使用方法、微控制器