液压控制系统及高空作业机械
文献发布时间:2023-06-19 19:21:53
技术领域
本发明涉及工程机械液压设备,具体地,涉及一种液压控制系统。另外,还涉及一种高空作业机械。
背景技术
高空作业机械通常都需要将人和物举升到一定的高度,并进行维修,设备安装等任务,由于是在高空进行作业,因此高空作业机械的平稳运行就显得尤为重要。
现有的高空作业机械都是通过液压系统来控制臂架的多种动作,一般有塔臂臂架、主臂臂架、主臂伸缩臂架、飞臂臂架和调平等等。液压主阀将塔臂、主臂、主臂伸缩、飞臂和调平等动作阀芯并联在一起,以能够对不同的动作阀芯输送液压油,控制执行器动作,但是由于液压系统受清洁度影响,经常出现卡阀现象,例如塔臂阀芯换向,塔臂臂架进行动作,此时主臂阀芯卡滞,主臂阀芯不在中位,液压油同时流向塔臂阀芯和主臂阀芯,塔臂臂架和主臂臂架同时动作,这样会给高空作业机械上面的人造成生命危险。
因此,如何在阀芯卡滞的情况下,避免安全事故的发生,是本领域技术人员亟待需要解决的问题。
发明内容
本发明所要解决的技术问题是提供一种液压控制系统,该液压控制系统能够在阀芯卡滞不在中位的情况下,避免卡滞的阀芯向执行器输送液压油,防止执行器产生不可控的动作,提高了液压系统的安全性。
本发明还要解决的技术问题是提供一种高空作业机械,该高空作业机械在阀芯卡滞不在中位的情况下,各执行器不会产生不可控的动作,确保高空作业的安全性。
为了解决上述技术问题,本发明提供了一种液压控制系统,包括进油油路、回油油路、进油联和多个工作联,所述进油油路连接所述进油联与各所述工作联以能够供油,所述回油油路连接所述进油联与各所述工作联以能够回油,部分或全部所述工作联的主阀芯的两个工作油口分别通过一条工作油路连接执行器,以能够使该执行器供油和回油,所述执行器的供油压力低于设定值时,该执行器不动作,其中,两条所述工作油路之间设置有卸荷阀,当所述工作联的主阀芯处于中位状态下,所述卸荷阀能够控制所述工作联的两条工作油路通过该卸荷阀相互连通。
优选地,部分或全部所述工作联设置有双向平衡阀,两条所述工作油路与所述双向平衡阀的两个进油口分别一一对应连接,所述双向平衡阀的两个出油口分别连接所述执行器。
具体地,包括先导油路,所述先导油路连接各所述工作联的主阀芯的控制端,所述进油联通过主油路连接供油单元,所述进油油路连接所述主油路,所述先导油路通过三通减压阀连接所述主油路。
优选地,包括负载反馈油路,各所述工作联的主阀芯的输出压力能够导入所述负载反馈油路,所述进油联设置有定差减压阀,所述主油路通过所述定差减压阀连接所述回油油路,所述负载反馈油路连接所述定差减压阀的弹簧端。
优选地,所述进油联设置有负载反馈卸荷阀,所述负载反馈油路通过所述负载反馈卸荷阀连接卸油油路。
具体地,所述负载反馈卸荷阀为电磁阀。
具体地,各所述工作联包括伸缩联、主臂联和塔臂联,所述伸缩联、所述主臂联和所述塔臂联均设置有所述双向平衡阀和所述卸荷阀。
具体地,所述伸缩联包括的伸缩主阀芯,所述伸缩主阀芯包括伸缩进油口、伸缩回油口、伸缩第一工作油口和伸缩第二工作油口,所述进油油路通过伸缩压力补偿阀连接所述伸缩进油口,所述伸缩主阀芯至少包括第一工作位、第二工作位和中位,其中,在所述伸缩主阀芯处于第一工作位状态下,所述伸缩进油口连通所述伸缩第一工作油口,所述伸缩回油口连通所述伸缩第二工作油口;在所述伸缩主阀芯处于第二工作位状态下,所述伸缩进油口连通所述伸缩第二工作油口,所述伸缩回油口连通所述伸缩第一工作油口;所述伸缩主阀芯为Y形中位机能。
具体地,所述伸缩主阀芯的控制端连接所述先导油路和卸油油路,所述伸缩主阀芯设置有伸缩第一电磁铁和伸缩第二电磁铁,所述伸缩第一电磁铁得电,所述先导油路内油压推动所述伸缩主阀芯移动至所述第一工作位;所述伸缩第二电磁铁得电,所述先导油路内油压推动所述伸缩主阀芯移动至所述第二工作位。
进一步地,本发明提供了一种高空作业机械,包括上述技术方案中任一项所述的液压控制系统。
通过上述方案,本发明的有益效果如下:
本发明液压控制系统通过在工作联的主阀芯连接执行器的两条工作油路之间设置卸荷阀,当工作联的主阀芯收到控制指令时,主阀芯会移动至中位,此时卸荷阀能够打开,使得控制工作联的两条工作油路通过该卸荷阀直接连通,因此,即使主阀芯卡滞没有移动至中位,液压油从卡滞的主阀芯通过,也能够从该卸荷阀直接返回到回油油路进行泄压,使得液压油不会建立足够的压力输送至执行器,避免该工作联的执行器产生不可控的动作。而当该工作联需要控制执行器进行动作时,主阀芯处于工作位,此时卸荷阀关闭,使得工作联的两条工作油路无法直接连通,从而使得进油的工作油路能够产生足够的压力输送至执行器,使得执行器能够进行进出油,执行器能够完成动作。
本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
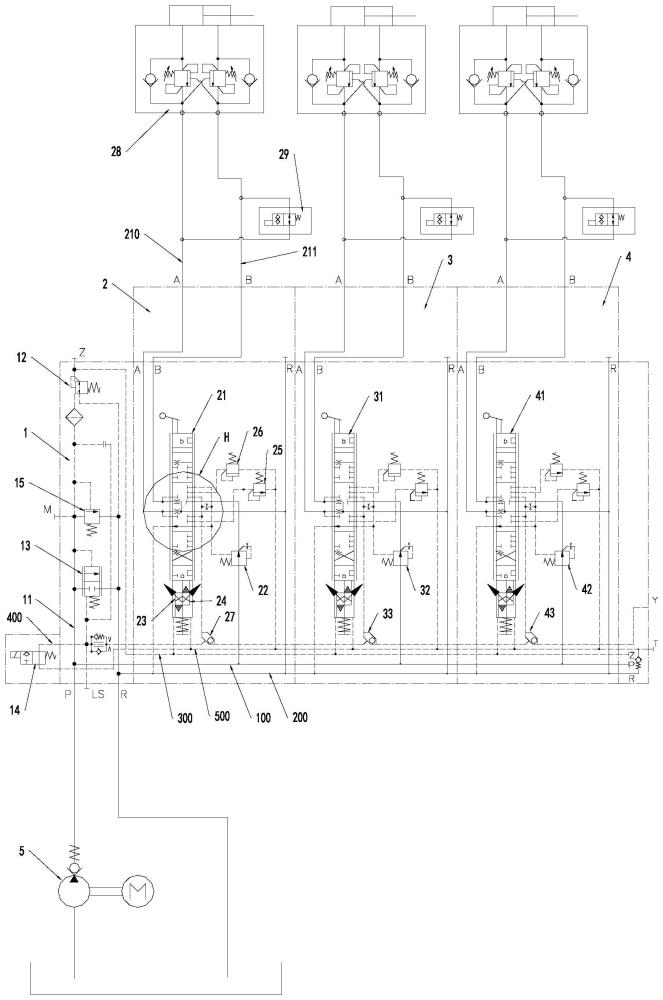
图1是本发明液压控制系统的一种具体实施例的液压原理图;
图2是图1中H处放大图。
附图标记说明
1进油联 11主油路
12三通减压阀 13定差减压阀
14负载反馈卸荷阀 15主溢流阀
2伸缩联 21伸缩主阀芯
22伸缩压力补偿阀 23伸缩第一电磁铁
24伸缩第二电磁铁 25伸缩第一溢流阀
26伸缩第二溢流阀 27第一梭阀
28伸缩双向平衡阀 29伸缩卸荷阀
210伸缩第一工作油路 211伸缩第二工作油路
3主臂联 31主臂主阀芯
32主臂压力补偿阀 33第二梭阀
4塔臂联 41塔臂主阀芯
42塔臂压力补偿阀 43第三梭阀
5供油单元
100进油油路 200回油油路
300先导油路 400负载反馈油路
500卸油油路
p伸缩进油口 t伸缩回油口
a伸缩第一工作油口 b伸缩第二工作油口
c伸缩第一油口 d伸缩第一溢流油口
e伸缩第二油口 f伸缩第三油口
g伸缩第二溢流油口 h伸缩第四油口
i伸缩第五油口 j伸缩第六油口
k伸缩第七油口
具体实施方式
以下结合附图对本发明的具体实施方式进行详细说明,应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,本发明的保护范围并不局限于下述的具体实施方式。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“形成”、“设有”、“设置”、“连接”等应做广义理解,例如,连接可以是直接连接,也可以是通过中间媒介进行间接的连接,可以是固定连接,也可以是可拆卸连接,或者是一体连接;可以是直接连接,也可以是通过中间连接件间接连接,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,在未作相应说明的情况下,采用的方位词“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,所接触的仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制;对于本发明的方位术语,应当结合实际安装状态进行理解。
本发明提供了一种液压控制系统,参见图1,作为本发明液压控制系统的一种具体实施例,包括进油油路100、回油油路200、进油联1和多个工作联,进油油路100连接进油联1与各工作联以能够供油,回油油路200连接进油联1与各工作联以能够回油,部分或全部工作联的主阀芯的两个工作油口分别通过一条工作油路连接执行器,以能够使该执行器供油和回油,且执行器的供油压力低于设定值时,该执行器不动作,其中,两条工作油路之间设置有卸荷阀,当工作联的主阀芯收到中位控制指令时,卸荷阀能够控制工作联的两条工作油路通过该卸荷阀相互连通,因此,即使存在工作联的主阀芯卡滞没有移动至中位,而其他工作联正在运行,主阀芯卡滞的工作联的主阀芯通过的液压油也会直接返回到回油油路200进行泄压,使得液压油不会建立足够的压力(油压小于设定值)输送至执行器,避免该工作联的执行器产生不可控的动作,从而确保该液压控制系统的平稳运行,提高了液压系统的安全性。另外,当工作联的主阀芯处于工作位状态时,此时卸荷阀关闭,使得工作联的两条工作油路无法直接连通,从而使得向执行器供油的工作油路能够产生足够的压力(油压大于设定值)输送至执行器,使得执行器能够进行供油和回油,执行器能够完成动作,且关闭状态下的卸荷阀也具有一定的安全作用,在向执行器供油的油压过大且超过安全值时,供油的工作油路能够直接通过卸荷阀向回油的工作油路进行溢流,避免过大油压对执行器造成损坏。
参见图1,作为本发明液压控制系统的一种优选实施方式,部分或全部工作联设置有双向平衡阀,两条工作油路与双向平衡阀的两个进油口分别一一对应连接,双向平衡阀的两个出油口分别连接执行器。双向平衡阀包括相同的两个部分,均是由一个单向阀和反向管路先导控制的压力阀组成,单向阀允许油液能够以较低的压力损失流入执行器,并且反向保持关闭。当工作联的其中第一条工作油路有油液流过,且其压力达到设定值时,相对应的第二条工作油路的压力阀在第一条工作油路油液的先导控制下打开,从而使得执行器能够通过第二条工作油路的压力阀进行回油,同时第一条工作油路的通过单向阀供油给执行器,使得执行器进行动作;因此,上述的设定值即为双向平衡阀中压力阀的先导控制的油压,而当第一条工作油路的油压小于设定值,第二条工作油路的压力阀不会开启,第二条工作油路的单向阀保持关闭,在工作联的主阀芯处于中位状态下,保持相对应执行器负载保持,无动作。当工作联的主阀芯出现卡滞时,由于收到中位控制指令,该工作联对应的卸荷阀打开,因此该工作联的第一条工作油路即使有油液流入,该油液也会通过卸荷阀直接卸荷,无法建立足够的油压,在双向平衡阀的作用下,执行器不会产生不可控的动作,确保液压系统的安全运行。
参见图1,本发明液压控制系统还包括先导油路300,先导油路300连接各工作联的主阀芯的控制端,以能够控制各工作联的主阀芯移动至不同位置,从而控制对应的执行器进行动作,为了进行供油,进油联1通过主油路11连接供油单元5,供油单元5将液压油输送至主油路11中,进油油路100连接主油路11,以能够对各工作联的主阀芯进行供油,先导油路300通过三通减压阀12连接主油路11,将主油路11的油压减小至所需的先导油压,同时三通减压阀12还与回油油路200连接,在减压能力不足的情况下,能够进行溢流,避免先导油压过大造成安全隐患。优选情况下,供油单元5由齿轮泵和单向阀组成,齿轮泵从液压油箱中吸油,液压油经过单向阀进入进油联1中的主油路11。
作为本发明液压控制系统的优选实施方式,参见图1,还包括负载反馈油路400,各工作联的主阀芯的输出压力能够导入负载反馈油路400,进油联1设置有定差减压阀13,主油路11通过定差减压阀13连接回油油路200,负载反馈油路400连接定差减压阀13的弹簧端,使得各工作联的最大负载压力能够作用在定差减压阀13的弹簧端,当负载压力变大时,定差减压阀13从主油路11分流的油液流量变小,从而使得主油路11流入进油油路100的油液流量变大,确保进油油路100的油液流量满足工作联的需求,各执行器的动作正常运行;而当负载压力变小时,工作联所需的油液流量变小,为了避免多余的油液流量流入进油油路100造成损耗,定差减压阀13从主油路11分流的油液流量变大,使得进油油路100的流量减小,而进油油路100减小的流量直接通过定差减压阀13返回到回油油路200,降低了损耗,从而达到节能的目的。需要说明的是,主油路11上还设置有连接回油油路200的主溢流阀15,以能够确保进油油路100的油压始终处于安全值范围。
进一步地,参见图1,进油联1设置有负载反馈卸荷阀14,负载反馈油路400通过负载反馈卸荷阀14连接卸油油路500,在各工作联不工作的情况下,将负载反馈卸荷阀14打开,负载反馈卸荷阀14直接与卸油油路500连接卸荷,定差减压阀13的弹簧端没有受到负载压力的作用,使得主油路11的油液能够直接通过定差减压阀13回油到回油油路200,降低进油油路100的油液损耗。而在工作联工作的情况下,负载反馈卸荷阀14关闭,各工作联的负载压力能够通过负载反馈油路400反馈在定差减压阀13的弹簧端,以进行进油油路100的流量调节,且当负载反馈油路400内的油液压力过大,超过安全值时,通过负载反馈卸荷阀14能够直接溢流至卸油油路500进行卸荷,确保本发明液压系统的运行安全。需要说明的是,负载反馈卸荷阀14优选为电磁阀,电磁铁得电,该负载反馈卸荷阀14关闭,电磁铁失电,该负载反馈卸荷阀14打开。
以高空作业平台为例,参见图1,各工作联包括伸缩联2、主臂联3和塔臂联4,其中,伸缩联2、主臂联3和塔臂联4均设置有双向平衡阀和卸荷阀,以能够在工作联的主阀芯发生卡滞无法回到中位的情况下,避免相对应的执行器产生不可控的动作,防止造成臂架与其他物体的碰撞,确保高空作业的人员的生命安全。
具体地,参见图1和图2,伸缩联2包括伸缩主阀芯21、伸缩主阀芯21包括伸缩进油口p、伸缩回油口t、伸缩第一工作油口a和伸缩第二工作油口b,进油油路100通过伸缩压力补偿阀22连接伸缩进油口p,以能够对伸缩主阀芯21输出的液压油进行压差补偿,伸缩回油口t连接回油油路200,伸缩第一工作油口a和伸缩第二工作油口b分别连接伸缩第一工作油路210和伸缩第二工作油路211,伸缩第一工作油路210和伸缩第二工作油路211通过伸缩双向平衡阀28分别连接伸缩油缸(伸缩联2的执行器)的无杆腔和有杆腔,且伸缩第一工作油路210和第二工作油路211之间设置有伸缩卸荷阀29,其中,伸缩主阀芯21至少包括第一工作位、第二工作位和中位,在伸缩主阀芯21处于第一工作位(图1中下位)状态下,伸缩进油口p连通伸缩第一工作油口a,伸缩回油口t连通伸缩第二工作油口b,伸缩卸荷阀29处于关闭状态,伸缩第一工作油路210的油压能够达到设定值,伸缩第一工作油路210能够通过伸缩双向平衡阀28向无杆腔供油,有杆腔能够通过伸缩双向平衡阀28向伸缩第二工作油路211回油;在伸缩主阀芯21处于第二工作位状态(图1中上位)下,伸缩进油口p连通伸缩第二工作油口b,伸缩回油口t连通伸缩第一工作油口a,伸缩卸荷阀29处于关闭状态,伸缩第二工作油路211的油压能够达到设定值,伸缩第二工作油路211能够通过伸缩双向平衡阀28向有杆腔供油,无杆腔能够通过伸缩双向平衡阀28向伸缩第一工作油路210回油;伸缩主阀芯21为Y形中位机能,即在伸缩主阀芯21处于中位状态下,伸缩第一工作油口a和伸缩第二工作油口b均连通伸缩回油口t,使得第一工作油路210和第二工作油路211中的油液进行卸荷,配合伸缩双向平衡阀28实现伸缩油缸的负载保持,且当接收到伸缩主阀芯21移动至中位的控制指令,同步控制伸缩卸荷阀29打开,使得伸缩第一工作油路210和伸缩第二工作油路211相互连通,因此,即使伸缩主阀芯21出现卡滞情况,没有回到中位,伸缩主阀芯21向伸缩第一工作油路210和伸缩第二工作油路211其中一条油路输送液压油时,都能够通过伸缩卸荷阀29向另一条油路卸荷,油压不会积累超过设定值,伸缩油缸无法通过伸缩双向平衡阀28进行回油,从而不会产生不可控的动作,确保高空作业的安全。
需要说明的是,参见图1,主臂联3包括主臂主阀芯31、对主臂主阀芯31输出油液压力补偿的主臂压力补偿阀32和第二梭阀33,塔臂联4包括塔臂主阀芯41、对塔臂主阀芯41输出油液压力补偿的塔臂压力补偿阀42和第三梭阀43,伸缩联2设置有第一梭阀27,通过第一梭阀27、第二梭阀33和第三梭阀43将伸缩联2、主臂联3和塔臂联4中的负载压力进行比较,从而能够将三个工作联中的最大负载压力导入负载反馈油路400进行负载反馈。
另外,参见图2,伸缩主阀芯21还包括伸缩第一油口c、伸缩第一溢流油口d、伸缩第二油口e、伸缩第三油口f、伸缩第二溢流油口g、伸缩第四油口h、伸缩第五油口i、伸缩第六油口j和伸缩第七油口k,其中,伸缩第五油口i和伸缩第六油口j分别连接伸缩第二工作油口b和伸缩第一工作油口a,伸缩第二油口e和伸缩第三油口f共同连接第一梭阀27的同一比较油口,且伸缩第二油口e和伸缩第三油口f还通过同一条油路连接伸缩压力补偿阀22的控制端,伸缩第六油口j与伸缩第三油口f在伸缩主阀芯21处于第一工作位时连通,伸缩第五油口i与伸缩第二油口e在伸缩主阀芯21处于第二工作位时连通,从而能够将伸缩联2的负载压力作用在第一梭阀27上与其他工作联的负载压力比较,并能够使得伸缩压力补偿阀22能够对伸缩主阀芯21输入输出油液进行比较,从而进行补偿确保压差恒定。伸缩第二油口e和伸缩第三油口f还通过同一条油路连接伸缩第一油口c和伸缩第四油口h,伸缩第一溢流油口d连接伸缩第一溢流阀25,伸缩第二溢流油口g连接伸缩第二溢流阀26,伸缩第四油口h和伸缩第一溢流油口d在伸缩主阀芯21处于第一工作位时连通,在伸缩第一工作油路210进油压力超过安全值时,可通过伸缩第一溢流阀25向卸油油路500溢流卸荷;伸缩第一油口c和伸缩第二溢流油口g在伸缩主阀芯21处于第二工作位时连通,在伸缩第二工作油路211进油压力超过安全值时,可通过伸缩第二溢流阀26向卸油油路500溢流卸荷;而当伸缩主阀芯21处于中位时,伸缩第四油口h连通伸缩第七油口k,该伸缩第七油口k直接连通回油油路200,使得伸缩压力补偿阀22的控制端在中位状态下连通回油油路200直接卸荷。需要说明的是,优选情况下,伸缩第二油口e和伸缩第三油口f共同连接伸缩压力补偿阀22的控制端以及伸缩第一油口c和伸缩第四油口h的同一条油路上设置有节流孔,以对油路中油压波动进行滤波。
作为本发明液压控制系统的一种优选实施方式,参见图1,伸缩主阀芯21的控制端连接先导油路300和卸油油路500,伸缩主阀芯21为电磁控制,优选情况下,伸缩卸荷阀29同样为电磁控制。其中,伸缩主阀芯21设置有伸缩第一电磁铁23和伸缩第二电磁铁24,当伸缩主阀芯21需要移动至第一工作位时,伸缩第一电磁铁23得电,先导油路300内油压推动伸缩主阀芯21移动至第一工作位;当伸缩主阀芯21需要移动至第二工作位时,伸缩第二电磁铁24得电,先导油路300内油压推动伸缩主阀芯21移动至第二工作位。同时在伸缩主阀芯21移动至第一工作位或第二工作位的状态下,伸缩卸荷阀29的电磁铁得电,伸缩卸荷阀29关闭,使得伸缩第一工作油路210和伸缩第二工作油路211之间不相互连通,伸缩第一工作油路210或伸缩第二工作油路211的供油压力大于设定值,伸缩油缸能够伸出或缩回,且在伸缩第一工作油路210或伸缩第二工作油路211的供油压力超过安全值时,能够通过油压打开伸缩卸荷阀29,使得两条工作油路直接连接,以能够进行溢流卸荷。而当伸缩主阀芯21接收到中位指令时,伸缩第一电磁铁23和伸缩第二电磁铁24均不得电,伸缩主阀芯21在控制端的复位弹簧的作用下移动至中位,同时伸缩卸荷阀29的电磁铁不得电,伸缩卸荷阀29打开,伸缩第一工作油路210和伸缩第二工作油路211直接通过伸缩卸荷阀29连通,因此,即使伸缩主阀芯21卡滞没有移动至中位,主臂联3和塔臂联4进行动作,卡滞的伸缩主阀芯21通过的油液能够直接从伸缩主阀芯21回油至回油油路200,使得伸缩第一工作油路210或伸缩第二工作油路211内油压不超过设定值,在伸缩双向平衡阀28的作用下,伸缩油缸不会产生不可控的动作。
本发明液压控制系统通过在工作联的主阀芯连接执行器的两条工作油路之间设置卸荷阀,当工作联的主阀芯收到控制指令时,主阀芯会移动至中位,此时卸荷阀能够打开,使得控制工作联的两条工作油路通过该卸荷阀直接连通,因此,即使主阀芯卡滞没有移动至中位,液压油从卡滞的主阀芯通过,也能够从该卸荷阀直接返回到回油油路进行泄压,使得液压油不会建立足够的压力输送至执行器,避免该工作联的执行器产生不可控的动作。而当该工作联需要控制执行器进行动作时,主阀芯处于工作位,此时卸荷阀关闭,使得工作联的两条工作油路无法直接连通,从而使得进油的工作油路能够产生足够的压力输送至执行器,使得执行器能够进行进出油,执行器能够完成动作。
进一步地,本发明还提供了一种高空作业机械,包括有本发明液压控制系统,因此,其具备有本发明液压控制系统的一切有益效果,在此不再赘述。
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。
- 液压控制系统及高空作业平台车
- 液压控制系统和高空作业机械
- 用于高空作业机械的液压系统以及高空作业机械