一种带自锁插销的液压缸安装机构
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及钢厂连铸区域机器人自动操作技术领域,尤其涉及一种带自锁插销的液压缸安装机构。
背景技术
炼钢厂内冶炼合格的钢水用钢包运输到连铸机钢包回转台受包位,在受包位人工安装液压缸到钢包底部滑动水口机构上,且插上插销,避免液压缸脱离造成安全事故。在此步骤中如人工操作则需要2步完成,而采用机器人安装时,很难安装好液压缸后再插上插销,因此需要开发一种自动机构,同时完成安装液压缸和插入插销的功能。
发明内容
本发明的目的是为了解决背景技术中存在的缺点,而提出的一种带自锁插销的液压缸安装机构。
为达到以上目的,本发明采用的技术方案为:一种带自锁插销的液压缸安装机构,包括液压缸,所述液压缸的侧面焊接有把手,所述把手的内部弹性安装有两组固定座,两组所述固定座的相反面分别安装有两组插销,两组所述插销分别贴合贯穿于把手的内部前后端面处,所述液压缸的外侧设置有卡座,所述卡座的前后端面边缘处均贯穿开设有一号连接孔,所述插销与一号连接孔相对齐,两组所述固定座的端部分别固定安装有两组插件板,所述插件板的侧方设置有夹爪气缸,所述夹爪气缸的侧面安装有连接盘,所述夹爪气缸的夹爪上对称镶嵌有两组卡爪,所述卡爪与插件板相配合。
优选的,两组所述插件板的相反面均对称开设有两组二号连接孔,所述卡爪与二号连接孔相配合,所述插件板与固定座一体成型,两组所述固定座的相反面均贯穿开设有通孔,所述插销镶嵌于通孔的内部。
优选的,所述把手的内部前后端面之间对称贴合贯穿安装有两组导向柱,两组所述导向柱位于同一垂线,两组所述固定座的相对面均贯穿开设有导向孔,所述导向柱贴合贯穿于导向孔内。
优选的,两组所述导向柱的外侧分别缠绕有两组弹簧体,两组所述弹簧体呈错位设置,位于后部的所述固定座的上端面与位于前部的固定座的下端面均开设有缺口槽,位于上部的所述弹簧体位于后部的固定座上的缺口槽内,位于下部的所述弹簧体位于前部的固定座上的缺口槽内。
优选的,位于上部的所述弹簧体位于把手的内部后端面与前部的固定座的后端面之间,位于下部的所述弹簧体位于把手的内部前端面与后部的固定座的前端面之间。
优选的,所述把手的前后端面均开设有凹槽,两组所述导向柱的前后端部均镶嵌有承载座,所述承载座镶嵌于凹槽的内部。
与现有技术相比,本发明具有以下有益效果:
机器人连接的夹爪气缸运动到把手附近,卡爪在夹爪气缸的作用下闭合夹紧两组插件板,此时卡爪插入插件板上的二号连接孔中,随后卡爪继续闭合使固定座上的插销收缩,随后机器人把夹爪气缸、把手和液压缸的组合体插入卡座中,继而卡爪在夹爪气缸的作用下开启松开被夹紧的两组插件板,插销在弹簧体作用下被推出,以插入卡座上的一号连接孔中,使把手和卡座锁定,接着夹爪气缸上的卡爪继续开启,使夹爪气缸的夹爪、卡爪和插件板、二号连接孔分离,随后机器人带动夹爪气缸脱离插件板,液压缸和卡座安装完成,且插销插入一号连接孔中,能够使液压缸不会从卡座中脱离,保证安全,该机构能够同时完成安装液压缸和插入插销的功能,以此有效的降低人工的劳动强度,提高了安全性。
附图说明
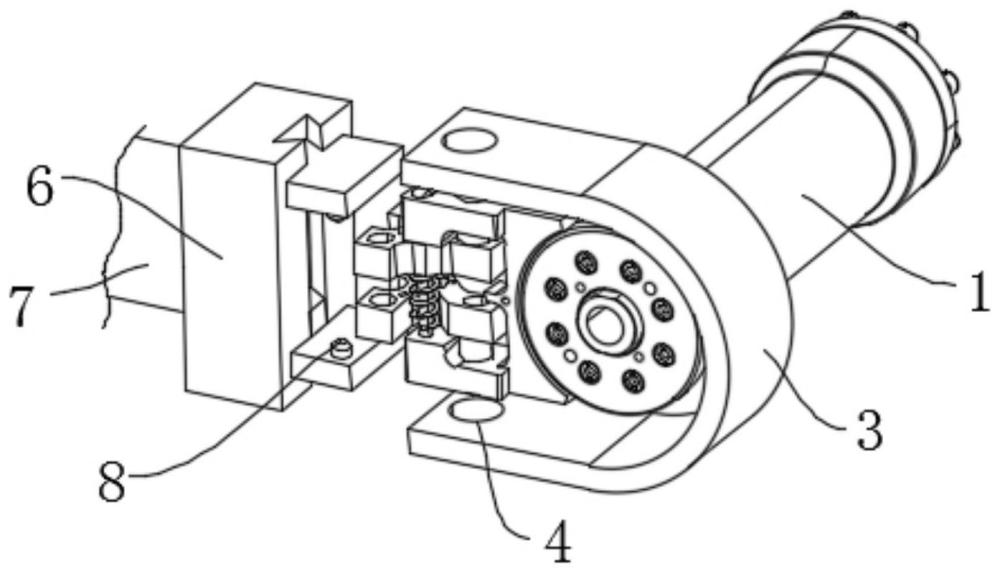
图1为本发明一种带自锁插销的液压缸安装机构的结构示意图;
图2为本发明一种带自锁插销的液压缸安装机构的局部视图;
图3为本发明一种带自锁插销的液压缸安装机构的另一视角示意图;
图4为本发明一种带自锁插销的液压缸安装机构的插件板处示意图;
图5为本发明一种带自锁插销的液压缸安装机构的弹簧体处示意图。
图中:1、液压缸;2、把手;3、卡座;4、一号连接孔;5、插件板;6、夹爪气缸;7、连接盘;8、卡爪;9、二号连接孔;10、固定座;11、弹簧体;12、插销;13、承载座;14、凹槽;15、导向柱;16、缺口槽。
具体实施方式
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
如图1-图5所示的一种带自锁插销的液压缸安装机构,包括液压缸1,液压缸1的侧面焊接有把手2,把手2的内部弹性安装有两组固定座10,把手2起到对两组固定座10进行承载的作用,两组固定座10的相反面分别安装有两组插销12,两组插销12分别贴合贯穿于把手2的内部前后端面处,液压缸1的外侧设置有卡座3,卡座3的前后端面边缘处均贯穿开设有一号连接孔4,插销12与一号连接孔4相对齐,插销12起到锁紧于卡座3上的一号连接孔4中的作用,两组固定座10的端部分别固定安装有两组插件板5,插件板5的侧方设置有夹爪气缸6,夹爪气缸6的侧面安装有连接盘7,连接盘7起到和机器人连接的作用,夹爪气缸6的夹爪上对称镶嵌有两组卡爪8,夹爪气缸6起到带动卡爪8向内或向外运动的作用,卡爪8与插件板5相配合。
两组插件板5的相反面均对称开设有两组二号连接孔9,卡爪8与二号连接孔9相配合,卡爪8和二号连接孔9之间的配合起到提高夹爪气缸6对两组插件板5进行夹紧时的牢固度的作用,插件板5与固定座10一体成型,两组固定座10的相反面均贯穿开设有通孔,插销12镶嵌于通孔的内部,通孔起到将插销12固定在固定座10上的作用。
把手2的内部前后端面之间对称贴合贯穿安装有两组导向柱15,两组导向柱15位于同一垂线,两组固定座10的相对面均贯穿开设有导向孔,导向柱15贴合贯穿于导向孔内,导向孔和导向柱15之间的配合起到对固定座10进行导向,使固定座10呈直线移动的作用。
两组导向柱15的外侧分别缠绕有两组弹簧体11,两组弹簧体11呈错位设置,弹簧体11起到对固定座10进行推动,使两组固定座10朝相反方向运动复位的作用,位于后部的固定座10的上端面与位于前部的固定座10的下端面均开设有缺口槽16,位于上部的弹簧体11位于后部的固定座10上的缺口槽16内,位于下部的弹簧体11位于前部的固定座10上的缺口槽16内,缺口槽16起到对弹簧体11进行容纳的作用。
位于上部的弹簧体11位于把手2的内部后端面与前部的固定座10的后端面之间,位于下部的弹簧体11位于把手2的内部前端面与后部的固定座10的前端面之间。
把手2的前后端面均开设有凹槽14,两组导向柱15的前后端部均镶嵌有承载座13,凹槽14起到对承载座13进行镶嵌的作用,承载座13镶嵌于凹槽14的内部,承载座13起到对导向柱15进行固定的作用。
工作时,机器人连接的夹爪气缸6运动到把手2附近,卡爪8在夹爪气缸6的作用下闭合夹紧两组插件板5,此时卡爪8插入插件板5上的二号连接孔9中,随后卡爪8继续闭合使固定座10上的插销12收缩,随后机器人把夹爪气缸6、把手2和液压缸1的组合体插入卡座3中,继而卡爪8在夹爪气缸6的作用下开启松开被夹紧的两组插件板5,插销12在弹簧体11作用下被推出,以插入卡座3上的一号连接孔4中,使把手2和卡座3锁定,接着夹爪气缸6上的卡爪8继续开启,使夹爪气缸6的夹爪、卡爪8和插件板5、二号连接孔9分离,随后机器人带动夹爪气缸6脱离插件板5,液压缸1和卡座3安装完成,且插销12插入一号连接孔4中,能够使液压缸1不会从卡座3中脱离,保证安全。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
- 一种带一键式按钮开关的中控插销锁
- 一种便于安装的防盗电子锁及其离合机构
- 一种自锁止的无人机减震垫安装机构
- 一种带锁定机构的简易式插销锁
- 一种汽车安全带锁扣用安装机构