一种绝缘斗臂车机器人工作斗控制系统
文献发布时间:2023-06-19 19:35:22
技术领域
本发明涉及带电作业技术领域,特别是涉及一种绝缘斗臂车机器人工作斗控制系统。
背景技术
随着国家基建、城市建设的快速发展,使用带有机器人工作斗的绝缘斗臂车越来越多的投入到电网检修工作中,带机器人工作斗的绝缘斗臂车,因工作斗无人化作业,车辆中途意外断电后,无法通过人工方式进行上电,从而会影响车辆的正常使用,常规做法是使用自锁的开关作为工作斗电源开关,从而保证工作斗长期保持有电状态,但是会增加工作斗电池耗电速度。
发明内容
为了解决以上技术问题,本发明提供一种绝缘斗臂车机器人工作斗控制系统,包括
工作斗液压回路,用于向工作斗提供液压动力;
工作斗液压回路切换阀,用于控制液压油路切换至与工作斗液压回路相连通;
压力继电器,安装于工作斗液压回路上,用于测量工作斗液压回路的液压压力;且预设有一工作压力,当工作斗液压回路的液压压力等于工作压力时,压力继电器的开关闭合;
工作斗阀组,工作斗阀组设置为O型中位机能;
下车控制器,电连接于工作斗液压回路切换阀,用于持续输出控制信号,控制信号用于控制工作斗液压回路切换阀的导通方向;
电源继电器,电源继电器的常开触点与压力继电器的开关触点并联在同一电源电路中;
工作斗控制器,用于在自身电源导通时,控制电源继电器的常开触点闭合。
本发明进一步限定的技术方案是:
进一步的,工作斗液压回路上还设有供压力继电器连接的测压口,测压口用于向压力继电器测量工作斗液压回路的液压压力时提供检测点。
前所述的一种绝缘斗臂车机器人工作斗控制系统,工作斗阀组上设置有供液压油进入的进油口。
前所述的一种绝缘斗臂车机器人工作斗控制系统,下车控制器输出控制信号的持续时间可调节设置。
前所述的一种绝缘斗臂车机器人工作斗控制系统,电源继电器所在的电源电路中设置有12V的启动电瓶。
本发明的有益效果是:
本发明中,斗臂车上装上电时,下车控制器对工作斗液压回路切换阀按设计时间进行输出,液压油路进入工作斗阀组,工作斗阀组使用O型中位机能,所以在上电瞬间会有短暂憋压,在测压口接入压力继电器,压力继电器开关在憋压时导通,工作斗控制器电源接入压力继电器开关,使工作斗控制器上电,同时对电源继电器输出供电,电源继电器开关并联至电源回路,此时平台液压回路停止供油,液压压力继电器断开后,电源继电器扔能持续供电,从而在工作斗没有人员操作的情况下,实现了工作斗的自动上电功能。
附图说明
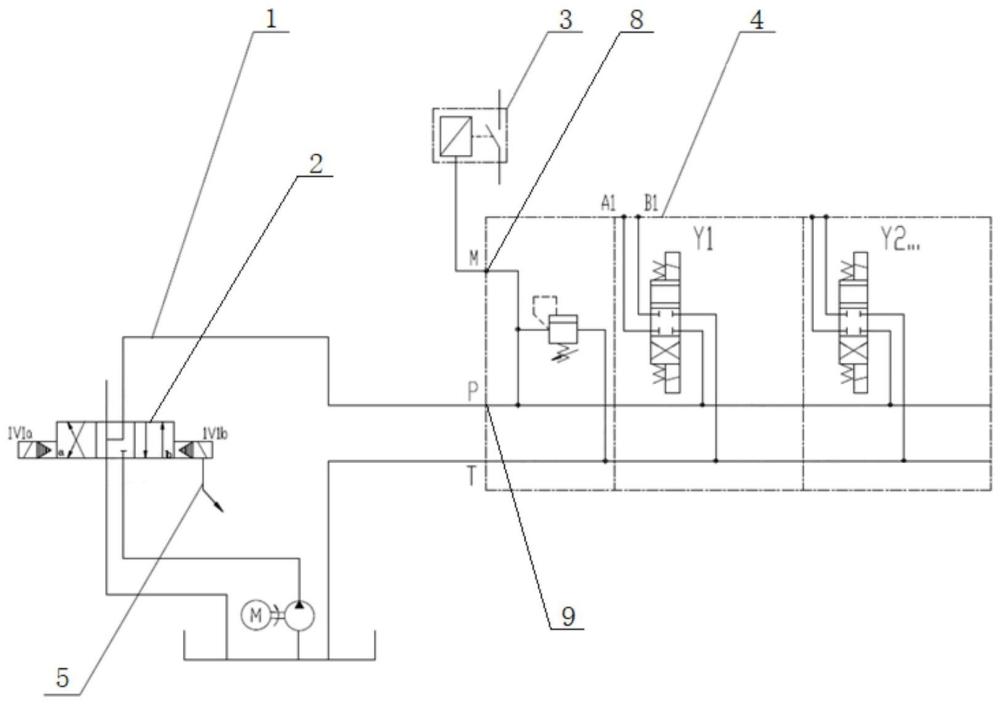
图1为本发明实施例的整体结构示意图;
图2为本发明实施例中压力继电器的连接示意图。
其中:1、工作斗液压回路;2、工作斗液压回路切换阀;3、压力继电器;4、工作斗阀组;5、下车控制器;6、电源继电器;7、工作斗控制器;8、测压口;9、进油口;10、启动电瓶。
具体实施方式
本实施例提供的一种绝缘斗臂车机器人工作斗控制系统,如图1至图2所示,包括
工作斗液压回路1,用于向工作斗提供液压动力;
工作斗液压回路切换阀2,用于控制液压油路切换至与工作斗液压回路1相连通;
压力继电器3,安装于工作斗液压回路1上,用于测量工作斗液压回路1的液压压力;且预设有一工作压力,当工作斗液压回路1的液压压力等于工作压力时,压力继电器3的开关闭合;
工作斗阀组4,工作斗阀组4设置为O型中位机能;
下车控制器5,电连接于工作斗液压回路切换阀2,用于持续输出控制信号,控制信号用于控制工作斗液压回路切换阀2的导通方向;
电源继电器6,电源继电器6的常开触点与压力继电器3的开关触点并联在同一电源电路中;
工作斗控制器7,用于在自身电源导通时,控制电源继电器6的常开触点闭合。
如图1所示,当需要机器人工作斗上电启动时,下车控制器5首先输出控制信号,控制工作斗液压回路切换阀2的电磁铁,液压油路通过工作斗液压回路切换阀2切换至工作斗液压回路1,油路进入工作斗阀组4的进油口9,因工作斗阀组4使用的是O型中位机能,机器人工作斗在没有动作的时候,油路进到工作斗阀组4的进油口9后产生憋压,测压口8处的压力上升,压力继电器3检测到液压压力到达设定压力后,压力继电器3的开关闭合;该过程的工作时间可以通过下车控制器5输出信号的输出时间来设定,不宜过长,短暂的信号输出可以有效避免液压油路长时间憋压。
如图2所示,机器人工作斗装有12V的启动电瓶10,压力继电器3的开关触点和电源继电器6的常开触点并联在电源电路中;工作斗液压回路1憋压触发压力继电器3开关的常开触点闭合,工作斗控制器7的电源导通,控制自身上电运行启动程序,上电后工作斗控制器7对电源继电器6进行信号持续输出,电源继电器6工作,电源继电器6的常开触点闭合。
下车控制器5输出信号持续设定时间停止输出后,工作斗液压回路切换阀2停止向机器人工作斗供油,工作斗阀组4测压口8处压力消失,压力继电器3停止工作,常开触点断开,但电源继电器6常开触点持续闭合中,工作斗控制器7正常供电,此时工作斗上电成功,工作斗控制器7可持续供电,上述过程在工作斗没有人员操作的情况,实现自动上电操作。
斗臂车上装上电时,下车控制器5对工作斗液压回路切换阀2按设计时间进行输出,液压油路进入工作斗阀组4,工作斗阀组4使用O型中位机能,所以在上电瞬间会有短暂憋压,在测压口8接入压力继电器3,压力继电器3开关在憋压时导通,工作斗控制器7电源接入压力继电器3开关,使工作斗控制器7上电,同时对电源继电器6输出供电,电源继电器6开关并联至电源回路,此时平台液压回路停止供油,液压压力继电器3断开后,电源继电器6扔能持续供电,从而实现了工作斗的自动上电功能。
除上述实施例外,本发明还可以有其他实施方式。凡采用等同替换或等效变换形成的技术方案,均落在本发明要求的保护范围。
- 一种绝缘斗臂车用的吊具
- 一种工作斗连接装置、绝缘斗臂车协同工作斗及绝缘斗臂车
- 一种用于工作斗带缓冲装置的固定装置和绝缘斗臂车