一种具有多级分离功能的自动化静电分离设备
文献发布时间:2023-06-19 19:38:38
技术领域
本发明涉及一种分离装置领域,特别是一种具有多级分离功能的自动化静电分离设备。
背景技术
高压静电分离技术具有吸附分离效果好,使用安全可靠等特点,因此被广泛应用于各种物料分离系统中、常见于加工车间的金属和塑料分离环节等。
根据专利文献公开号为CN210935405U所提供的一种静电分离装置,包括壳体、设置于所述壳体内的静电分离机构和设置于所述壳体上方的进料机构,所述进料机构包括进料斗、与进料斗连接的振动给料器和与所述振动给料器连通的进料通道,所述进料通道的出口与所述壳体内连通,所述进料通道带有引导物料下滑而形成料幕的斜面,所述静电分离机构包括均竖直设置的转轴和电极网板,所述转轴和电极网板相对设置,所述壳体位于转轴和电极网板之间的底部设置有用于手机混合料的收集斗,所述壳体的两侧分别设置有用于收集金属的出料口和用于收集塑料的出料口。虽然该机构能够对金属和塑料经行筛分,但是没有考虑到该机构在筛选过程中出现的偶然性,导致筛选金属的结果中出现塑料,使筛选不够严谨,影响筛选质量。
发明内容
本发明的目的在于提供一种具有多级分离功能的自动化静电分离设备以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种具有多级分离功能的自动化静电分离设备,包括外壳和设置在外壳下方的导体罐,外壳上表面一侧安装有电晕机,外壳一侧外壁安装有静电发生器,外壳内壁两侧对称设置有高压发生装置和静电板,外壳内壁两侧位于两块高压发生装置和静电板下方对称设置有滑槽板,两块滑槽板内部设置有位移附着机构,外壳下表面位于高压发生装置下方开设有非导体出口,外壳下表面位于静电板下方开设有导体出口,导体出口下方设置有导体罐,导体罐包括收纳盒,收纳盒上表面设置有静电盖板,收纳盒内部设有搅拌辊,搅拌辊上表面与静电盖板活动连接,静电盖板上表面设置有第三电机。
作为本发明优选的方案,电晕机通过导线电性连接有高压发生装置,静电发生器通过导线电性连接有静电盖板和静电板,第三电机输出轴贯穿静电盖板与搅拌辊上端连接,非导体出口下方设置有非导体罐。
作为本发明优选的方案,每个高压发生装置和静电板均与外壳内壁为固定连接,两个滑槽板均与外壳内壁焊接,收纳盒与静电盖板卡口连接,第三电机与静电盖板固定连接。
作为本发明优选的方案,位移附着机构包括支撑架,支撑架两侧对称设置有活动块,活动块与滑槽板内壁相接触呈滑动连接,支撑架靠近静电发生器的一侧设置有旋转辊,旋转辊两端均连接有第二齿轮,第二齿轮远离旋转辊的一侧与支撑架两侧活动连接,旋转辊远离静电发生器的一侧设置有毛刷,支撑架远离静电发生器的一侧外壁设置有液压杆,支撑架内部设置有第二电机,第二电机输出端设置有传动齿轮,传动齿轮通过履带与第二齿轮相连接。
作为本发明优选的方案,两个活动块均与支撑架固定连接,旋转辊两端与第二齿轮均为固定连接,毛刷两端与支撑架固定连接,传动齿轮与第二电机输出端固定连接,第二电机与支撑架内壁固定连接,液压杆输出端与支撑架固定连接,液压杆贯穿外壳内壁与外壳
固定连接,液压杆能够使支撑架在高压发生装置和静电板两侧来回位移。
作为本发明优选的方案,外壳上表面远离电晕机的一侧设置有进料口,外壳内侧位于进料口下方设置有破碎机,破碎机碎料出口连接有碎料滑道,碎料滑道将碎料导向高压发生装置中心,破碎机和碎料滑道中间设置有挡板,挡板贯穿外壳内壁,外壳外壁位于挡板一侧设有第一电机,第一电机与外壳固定连接,第一电机输出端设有第一齿轮,挡板靠近第一电机的一侧镶嵌设有内道齿,内道齿与第一齿轮啮合连接。
作为本发明优选的方案,进料口贯穿外壳外壁与破碎机输入口密闭连接,破碎机和碎料滑道外壁均与外壳内壁固定连接,挡板与外壳相接触呈滑动连接,第一电机输出端与第一齿轮固定连接,内道齿与挡板固定连接。
与现有技术相比,本发明的有益效果为:为了防止机构在筛选过程中出现的偶然性,导致筛选结果不够精确,工作人员首先将具有多级分离功能的自动化静电分离设备连接外部电源,然后控制面板给电晕机和静电发生器给电,电晕机和静电发生器通过导线使高压发生装置和静电板开始工作,当电晕机通电之后产生电晕电极与旋转辊(接地正极)之间形成电晕电场,工作人员将物料从进料口投入,物料从进料口进入后破碎机打碎,碎料从碎料滑道滑落至高压发生装置的电晕电场范围内,由于电晕电极直径很小(0.3~0.5mm),从而向着旋转辊方向放出大量电子,因此,靠近高压发生装置一边的空间都带负电荷,使物料全部飞向位移附着机构,控制面板控制支撑架内部设置的第二电机带动传动齿轮旋转,履带将这股转动势能传递给旋转辊,使旋转辊逆时针旋转,当旋转辊旋转接近一圈前,破碎机停止工作,控制面板控制设置在外壳上表面的第一电机开始工作,设置在第一电机输出轴上的第一齿轮开始旋转,使与其通过内道齿啮合连接的挡板下移,挡住破碎机的输出端,剩余在碎料滑道上的物料继续下落至旋转辊上,使旋转辊吸附接近一圈的物料后,控制面板发出指令控制支撑架一侧的液压杆开始工作将固定着旋转辊的支撑架推入静电板区域,设置在支撑架两侧的活动块在滑槽板的配合下对支撑架起限制作用,因为静电发生器产生的静电极和旋转辊之间不放电,只产生高压静电场,因为导体物料所带的电荷(剩余电荷)要比非导体物料带的少,所以当导体物料进入静电场后,仍继续放电,因此,导体物料在重力和离心力的作用下离开旋转辊从导体出口滑落至导体罐内,而非导体物料由于放电速度很慢,表面剩余许多负电荷,受到旋转辊的吸引力作用,克服重力分力和离心力,而被吸附在旋转辊表面上,当其离开静电场后,在界面吸引力的作用下,仍被吸附在旋转辊表面上,直到被旋转辊一侧的毛刷刷下而落入非导体出口进入非导体罐后,控制面板控制第一电机使挡板向上位移,考虑到机构在筛选过程中出现的偶然性,在收纳盒内部设置搅拌辊,通过第三电机使搅拌辊不断旋转将物料不断翻涌上来,因为颗粒之间相互摩擦产生静电,所以当塑料颗粒被翻涌到表面之后会被静电盖板吸附在上面,等到一定时间之后只需要工作人员打开静电盖板抹去静电盖板下表面的塑料颗粒即可。该机构针对筛选过程中出现的偶然性进行二次筛选,保证了筛选的质量,同时有着占地面积小,结构简单的特点。
附图说明
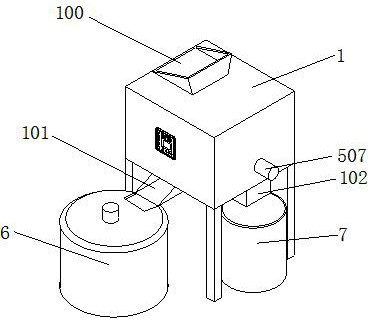
图1为本发明整体外观轴侧图;
图2为本发明整体内部结构图;
图3为本发明原理关系图;
图4为本发明导体收纳箱机构图;
图5为本发明位移结构图;
图6为本发明内道齿位置关系图。
图中:1、外壳;100、进料口;101、导体出口;102、非导体出口;2、破碎机;201、碎料滑道;202、内道齿;203、第一齿轮;204、第一电机;205、挡板;3、高压发生装置;4、静电板;5、位移附着机构;501、旋转辊;502、第二齿轮;503、传动齿轮;504、履带;505、第二电机;506、毛刷;507、液压杆;508、支撑架;509、活动块;510、滑槽板;6、导体罐;601、收纳盒;602、搅拌辊;603、静电盖板;604、第三电机;7、非导体罐;8、电晕机;9、静电发生器。
具体实施方式
下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。给出了本发明的若干实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
实施例
请着重参照附图1-6,一种具有多级分离功能的自动化静电分离设备,包括外壳1和设置在外壳1下方的导体罐6,外壳1上表面一侧安装有电晕机8,外壳1一侧外壁安装有静电发生器9,外壳1内壁两侧对称设置有高压发生装置3和静电板4,每个高压发生装置3和静电板4均与外壳1内壁为固定连接,电晕机8通过导线电性连接有高压发生装置3,静电发生器9通过导线电性连接有静电盖板603和静电板4,外壳1内壁两侧位于两块高压发生装置3和静电板4下方对称设置有滑槽板510,两个滑槽板510均与外壳1内壁焊接,两块滑槽板510内部设置有位移附着机构5,外壳1下表面位于高压发生装置3下方开设有非导体出口102,非导体出口102下方设置有非导体罐7,外壳1下表面位于静电板4下方开设有导体出口101,导体出口101下方设置有导体罐6,导体罐6包括收纳盒601,收纳盒601上表面设置有静电盖板603,收纳盒601与静电盖板603卡口连接,收纳盒601内部设有搅拌辊602,搅拌辊602上表面与静电盖板603活动连接,静电盖板603上表面设置有第三电机604,第三电机604与静电盖板603固定连接,第三电机604输出轴贯穿静电盖板603与搅拌辊602上端连接,位移附着机构5包括支撑架508,支撑架508两侧对称设置有活动块509,两个活动块509均与支撑架508固定连接,活动块509与滑槽板510内壁相接触呈滑动连接,支撑架508靠近静电发生器9的一侧设置有旋转辊501,旋转辊501两端均连接有第二齿轮502,旋转辊501两端与第二齿轮502均为固定连接,第二齿轮502远离旋转辊501的一侧与支撑架508两侧活动连接,旋转辊501远离静电发生器9的一侧设置有毛刷506,毛刷506两端与支撑架508固定连接,支撑架508远离静电发生器9的一侧外壁设置有液压杆507,液压杆507输出端与支撑架508固定连接,液压杆507贯穿外壳1内壁与外壳1固定连接,液压杆507能够使支撑架508在高压发生装置3和静电板4两侧来回位移支撑架508内部设置有第二电机505,第二电机505与支撑架508内壁固定连接,第二电机505输出端设置有传动齿轮503,传动齿轮503与第二电机505输出端固定连接,传动齿轮503通过履带504与第二齿轮502相连接,外壳1上表面远离电晕机8的一侧设置有进料口100,外壳1内侧位于进料口100下方设置有破碎机2,进料口100贯穿外壳1外壁与破碎机2输入口密闭连接,破碎机2碎料出口连接有碎料滑道201,破碎机2和碎料滑道201外壁均与外壳1内壁固定连接,碎料滑道201将碎料导向高压发生装置3中心,破碎机2和碎料滑道201中间设置有挡板205,挡板205贯穿外壳1内壁,挡板205与外壳1相接触呈滑动连接,外壳1外壁位于挡板205一侧设有第一电机204,第一电机204与外壳1固定连接,第一电机204输出端设有第一齿轮203,第一电机204输出端与第一齿轮203固定连接,挡板205靠近第一电机204的一侧镶嵌设有内道齿202,内道齿202与挡板205固定连接,内道齿202与第一齿轮203啮合连接。
为了防止机构在筛选过程中出现的偶然性,导致筛选结果不够精确,工作人员首先将具有多级分离功能的自动化静电分离设备连接外部电源,然后控制面板给电晕机8和静电发生器9给电,电晕机8和静电发生器9通过导线使高压发生装置3和静电板4开始工作,当电晕机8通电之后产生电晕电极与旋转辊501(接地正极)之间形成电晕电场,工作人员将物料从进料口100投入,物料从进料口100进入后破碎机2打碎,碎料从碎料滑道201滑落至高压发生装置3的电晕电场范围内,由于电晕电极直径很小(0.3~0.5mm),从而向着旋转辊501方向放出大量电子,因此,靠近高压发生装置3一边的空间都带负电荷,使物料全部飞向位移附着机构5,控制面板控制支撑架508内部设置的第二电机505带动传动齿轮503旋转,履带504将这股转动势能传递给旋转辊501,使旋转辊501逆时针旋转,当旋转辊501旋转接近一圈前,破碎机2停止工作,控制面板控制设置在外壳1上表面的第一电机204开始工作,设置在第一电机204输出轴上的第一齿轮203开始旋转,使与其通过内道齿202啮合连接的挡板205下移,挡住破碎机2的输出端,剩余在碎料滑道201上的物料继续下落至旋转辊501上,使旋转辊501吸附接近一圈的物料后,控制面板发出指令控制支撑架508一侧的液压杆507开始工作将固定着旋转辊501的支撑架508推入静电板4区域,设置在支撑架508两侧的活动块509在滑槽板510的配合下对支撑架508起限制作用,因为静电发生器9产生的静电极和旋转辊501之间不放电,只产生高压静电场,因为导体物料所带的电荷(剩余电荷)要比非导体物料带的少,所以当导体物料进入静电场后,仍继续放电,因此,导体物料在重力和离心力的作用下离开旋转辊501从导体出口101滑落至导体罐6内,而非导体物料由于放电速度很慢,表面剩余许多负电荷,受到旋转辊501的吸引力作用,克服重力分力和离心力,而被吸附在旋转辊501表面上,当其离开静电场后,在界面吸引力的作用下,仍被吸附在旋转辊501表面上,直到被旋转辊501一侧的毛刷506刷下而落入非导体出口102进入非导体罐7后,控制面板控制第一电机204使挡板205向上位移,考虑到机构在筛选过程中出现的偶然性,在收纳盒601内部设置搅拌辊602,通过第三电机604使搅拌辊602不断旋转将物料不断翻涌上来,因为颗粒之间相互摩擦产生静电,所以当塑料颗粒被翻涌到表面之后会被静电盖板603吸附在上面,等到一定时间之后只需要工作人员打开静电盖板603抹去静电盖板603下表面的塑料颗粒即可,该机构针对筛选过程中出现的偶然性进行二次筛选,保证了物料筛选的质量,同时有着占地面积小,结构简单的特点。
本发明工作流程:为了防止机构在筛选过程中出现的偶然性,导致筛选结果不够精确,工作人员首先将具有多级分离功能的自动化静电分离设备连接外部电源,然后控制面板给电晕机8和静电发生器9给电,电晕机8和静电发生器9通过导线使高压发生装置3和静电板4开始工作,当电晕机8通电之后产生电晕电极与旋转辊501(接地正极)之间形成电晕电场,工作人员将物料从进料口100投入,物料从进料口100进入后破碎机2打碎,碎料从碎料滑道201滑落至高压发生装置3的电晕电场范围内,由于电晕电极直径很小(0.3~0.5mm),从而向着旋转辊501方向放出大量电子,因此,靠近高压发生装置3一边的空间都带负电荷,使物料全部飞向位移附着机构5,控制面板控制支撑架508内部设置的第二电机505带动传动齿轮503旋转,履带504将这股转动势能传递给旋转辊501,使旋转辊501逆时针旋转,当旋转辊501旋转接近一圈前,破碎机2停止工作,控制面板控制设置在外壳1上表面的第一电机204开始工作,设置在第一电机204输出轴上的第一齿轮203开始旋转,使与其通过内道齿202啮合连接的挡板205下移,挡住破碎机2的输出端,剩余在碎料滑道201上的物料继续下落至旋转辊501上,使旋转辊501吸附接近一圈的物料后,控制面板发出指令控制支撑架508一侧的液压杆507开始工作将固定着旋转辊501的支撑架508推入静电板4区域,设置在支撑架508两侧的活动块509在滑槽板510的配合下对支撑架508起限制作用,因为静电发生器9产生的静电极和旋转辊501之间不放电,只产生高压静电场,因为导体物料所带的电荷(剩余电荷)要比非导体物料带的少,所以当导体物料进入静电场后,仍继续放电,因此,导体物料在重力和离心力的作用下离开旋转辊501从导体出口101滑落至导体罐6内,而非导体物料由于放电速度很慢,表面剩余许多负电荷,受到旋转辊501的吸引力作用,克服重力分力和离心力,而被吸附在旋转辊501表面上,当其离开静电场后,在界面吸引力的作用下,仍被吸附在旋转辊501表面上,直到被旋转辊501一侧的毛刷506刷下而落入非导体出口102进入非导体罐7后,控制面板控制第一电机204使挡板205向上位移,考虑到机构在筛选过程中出现的偶然性,在收纳盒601内部设置搅拌辊602,通过第三电机604使搅拌辊602不断旋转将物料不断翻涌上来,因为颗粒之间相互摩擦产生静电,所以当塑料颗粒被翻涌到表面之后会被静电盖板603吸附在上面,等到一定时间之后只需要工作人员打开静电盖板603抹去静电盖板603下表面的塑料颗粒即可。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种具有泥沙分离功能的矿选破碎设备
- 一种连续式油浆静电分离装置及分离系统和分离方法
- 一种具有多级除尘功能的公共环卫用过滤除尘设备
- 一种污水处理用具有多级过滤功能的环保设备
- 具有分离沉积功能的雨水净化设备
- 一种具有多级分离功能的分离器及分离方法
- 一种具有多级分离功能的油气分离器