用于港口矿石堆场的起垄围堰车
文献发布时间:2024-01-17 01:20:32
技术领域
本发明涉及港口机械技术领域,特别是属于一种用于港口矿石堆场的起垄围堰车。
背景技术
传统的港口矿石堆场,货垛围堰需要劳务人员纯手工利用铁锹堆整出来,工作强度大,工作效率低。
发明内容
本发明的目的即在于提供一种用于港口矿石堆场的起垄围堰车,达到解决现有的港口矿石堆场货垛围堰需要劳务人员纯手工作业,工作强度大、工作效率低的问题。
本发明提供的用于港口矿石堆场的起垄围堰车,包括车架、移动底盘、动力装置、取料装置、起垄装置、压实装置、电控系统和液压站;所述移动底盘设置在车架底部;所述取料装置设置在车架头部;所述起垄装置包括定型板和挡座;定型板位于取料装置的送料口下方;挡座固定设置在定型板的上方,且位于送料口偏向车架尾部的一侧;挡座与车架连接固定;挡座在靠近送料口的一侧设置有旋转开合门;所述压实装置包括压实辊、抬升器和支撑杆;压实辊设置在挡座偏向车架尾部的一侧,压实辊的工作横截面与定型板的定型面位置对应;压实辊的转轴两端分别铰接有支撑杆,支撑杆的两端与车架铰接;抬升器设置在支撑杆上方,且抬升器底端铰接在支撑杆其一端与车架的铰接处; 所述电控系统包括控制器、接触开关和遥控器;接触开关设置在挡座内,接触开关与控制器电连接;遥控器与控制器无线连接;所述液压站和动力装置机械连接;液压站分别与移动底盘、取料装置和压实辊的转轴传动配合;控制器与液压站电连接。
进一步的,所述移动底盘在车架两侧分别设置有行走轮,并且两侧行走轮分别设置有第一液压马达和第二液压马达;所述取料装置包括搅笼、取料板、中空螺旋叶片和第三液压马达;搅笼头端伸出车架一侧;搅笼尾部偏向车架尾部的一侧开设有送料口;取料板设置在搅笼头端,取料板头部偏向车架头部的一侧开设有进料口;中空螺旋叶片设置在搅笼内腔中,第三液压马达设置在搅笼尾端,第三液压马达输出端与中空螺旋叶片机械连接;所述压实辊的转轴与移动底盘其中一侧的行走轮之间设置有传动机构;所述液压站分别与第一液压马达、第二液压马达和第三液压马达油路连接;所述控制器分别与第一液压马达、第二液压马达和第三液压马达通过电磁阀连接。
进一步的,所述抬升器包括底座、伸缩丝杠、缓冲弹簧和转把;底座位于支撑杆上方,且底座一端铰接在支撑杆其一端与车架的铰接处;伸缩丝杠设置在底座远离支撑杆的一端,伸缩丝杠一端与底座螺纹配合固定;伸缩丝杠远离底座的一端穿过车架上端的架杆伸出至车架上方;缓冲弹簧套在伸缩丝杠外,并设置在底座和车架上端的架杆之间;转把设置在伸缩丝杠伸出车架的一端。
本发明所提供的一种用于港口矿石堆场的起垄围堰车,设计有车架、移动底盘、动力装置、取料装置、起垄装置、压实装置、电控系统和液压站。
移动底盘采用履带式车轮,能够适应恶劣地面,并且车架两侧的履带式车轮分别设置有第一液压马达和第二液压马达采用液压控制,不仅可以控制车辆的前进和后退,还可以通过两侧履带式车轮之间的差速控制车辆转向。
取料装置包括搅笼、取料板、中空螺旋叶片、升降器和第三液压马达;作业时,通过操作车辆,将取料板伸入货垛,利用中空螺旋叶片将货垛内的矿石通过搅笼输送到起垄装置内作为填料;其中,中空螺旋叶片设置有第三液压马达采用液压控制,能够根据实际情况控制中空螺旋叶片的工作转速;其中,取料板和搅笼采用螺纹配合固定,并且取料板设计有呈间隔分布的连接孔,另外搅笼还设计有升降器,用户能够根据货垛的实际情况,例如货垛一侧部分缺料,通过人工调整取料板在搅笼一端的伸出长度和人工操作升降器用于调整搅笼的伸出角度,达到取料板插入货垛取料的目的。
起垄装置包括定型板和挡座;定型板根据实际所要围堰的尺寸所设计,从取料装置输送的填料落入定型板内定型,堆成实际所要需要的围堰状。
压实装置包括压实辊、抬升器和刮料板;压实辊用于将定型板内的填料压实,压实辊与车架其一侧的履带式车轮传动连接,通过与其传动连接的履带式车轮转速控制压实辊的转速;抬升器采用伸缩丝杠,当车辆不需要作业时,用户手动操作伸缩丝杠,将压实辊抬升离开地面,此时移动车辆,可避免压实辊受地面碎石障碍,能够保障车辆非作业移动时的稳定性;刮料板则用于车辆作业时,将黏粘在压实辊表面的杂料刮除,避免杂料破坏围堰成型。
电控系统包括控制器、接触开关和遥控器,接触开关设置在起垄装置的挡座内,当取料装置输送的填料高于定型板后,填料向挡座倾斜,当填料将挡座的开合门推动到触发接触开关时,接触开关向控制器反馈信号,控制器控制车辆前进,并驱动压实辊对填料进行压实作业,本发明还设计有遥控器,采用人工远程遥控,便于人员操作车辆,同时也避免人员的作业风险。
综上所述,本发明设计了一种能够人工远程遥控的起垄围堰车,相对于传统的手工作业,解放了人力资源,提高了工作效率,有效解决了传统方案工作强度大、工作效率低的问题。
附图说明
附图部分公开了本发明具体实施例,其中,
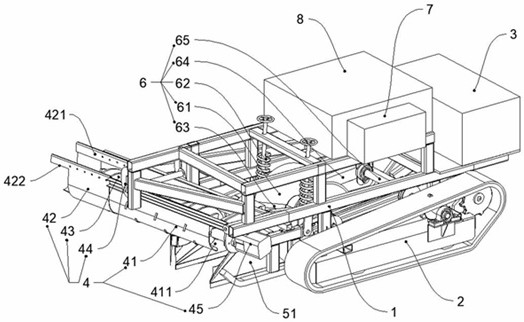
图1为本发明的结构示意图;
图2为本发明的正视图;
图3为本发明的后视图;
图4为本发明的左侧视图;
图5为本发明的右侧视图;
图6为本发明的俯视图;
图7为本发明的仰视图。
图中,部件名称与附图编号的对应关系为:
1、车架;2、移动底盘;3、动力装置;4、取料装置;41、搅笼;411、送料口;42、取料板;421、连接孔;422、进料口;43、中空螺旋叶片;44、升降器;441、升降板;442、螺栓;45、第三液压马达;5、起垄装置;51、定型板;52、挡座;6、压实装置;61、压实辊;62、抬升器;621、底座;622、伸缩丝杠;623、缓冲弹簧;624、转把;63、刮料板;64、支撑杆;65、传动杆;7、电控系统;71、控制器;72、接触开关;73、遥控器;8、液压站。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
本发明提供的用于港口矿石堆场的起垄围堰车,包括车架1、移动底盘2、动力装置3、取料装置4、起垄装置5、压实装置6、电控系统7和液压站8。
移动底盘2设置在车架1底部;移动底盘2包括两组履带式车轮、第一液压马达和第二液压马达;两组履带式车轮分别设置在车架1两侧,并且两组履带式车轮分别与第一液压马达和第二液压马达机械连接;履带式车轮,具备适应恶劣地面的优势;而车架1两侧的履带式车轮分别通过第一液压马达和第二液压马达采用液压控制,用户不仅可以控制车辆的前进和后退,还可以通过两侧履带式车轮之间的差速控制车辆转向。
取料装置4设置在车架1头部;取料装置4包括搅笼41、取料板42、中空螺旋叶片43、升降器44和第三液压马达45;搅笼41为上方开口式U形长笼;搅笼41尾端铰接在车架1上,搅笼41头端伸出车架1一侧;搅笼41尾部偏向车架1尾部的一侧开设有送料口411;取料板42为贴合搅笼41内腔的上方开口式U形长笼,取料板42设置在搅笼41头部内腔中;取料板42中尾部的上边沿开设有呈间隔分布的连接孔421,取料板42在连接孔421处与搅笼41螺纹配合固定;取料板42头部偏向车架1头部的一侧开设有进料口422;中空螺旋叶片43设置在搅笼41内腔中;第三液压马达45螺纹配合固定在搅笼41尾端,第三液压马达45的输出端与中空螺旋叶片43机械连接;升降器44设置在车架1靠近搅笼41头端的一侧,升降器44包括一对升降板441和一端带有螺母的螺栓442;升降板441焊接在车架1上,升降板441分别位于搅笼41的两侧;升降板441中部开设有行程槽;螺栓442穿过升降板441的行程槽,并在升降板441一侧与螺母配合固定在升降板441上;螺栓442位于搅笼41上方中部,并与搅笼41上方两边沿焊接。
取料板42的作用是伸入货垛中,将货垛中的矿石取出作为围堰的填料;进料口422的作用是在车辆前进时,便于矿石从进料口422进入取料板42;中空螺旋叶片43则通过第三液压马达45的驱动,将取料板42内的矿石经过搅笼41,从送料口411输送到起垄装置5内;取料板42利用不同位置的连接孔421与搅笼41螺纹配合,能够调整取料板42在搅笼41一端的伸出长度;搅笼41通过螺栓442在升降板441的行程槽内位置调节,并配合其一端铰接,能够调整搅笼41的伸出角度;调整取料板42在搅笼41一端的伸出长度以及调整搅笼41的伸出角度,作用是为了用户能够根据货垛的实际情况,例如货垛一侧部分缺料的情况下,将取料板42调整到可以插入货垛的位置,从而达到取料的目的;并且,取料板42与搅笼41之间的连接以及螺栓442与升降板441之间的连接均采用螺纹配合,结构简单稳定,直接手动操作即可。
起垄装置5设置在搅笼41尾部下方;起垄装置5包括定型板51和挡座52;定型板51为两块挡板组成,其根据围堰的两侧外形和尺寸所设计;定型板51对取料装置4输送至其内部的填料进行初步定型;定型板51的两块挡板对称分布在送料口411下方两侧;挡座52焊接在定型板51的上方,挡座52位于送料口411偏向车架1尾部的一侧,挡座52与车架1之间螺纹配合固定;挡座52在靠近送料口411的一侧设置有单扇旋转开合门。
压实装置6设置在起垄装置5偏向车架1尾部的一侧;压实装置6包括压实辊61、抬升器62、刮料板63、支撑杆64和传动杆65;压实辊61设置在挡座52偏向车架1尾部的一侧,压实辊61的工作横截面根据围堰的实际尺寸所设计,压实辊61的工作横截面与定型板51的定型面位置对应;压实辊61的作用是将起垄装置5初步定型后的填料进行压实加固。
压实辊61的转轴两端分别铰接有支撑杆64,转轴位于支撑杆64偏向车架1头部的位置;支撑杆64偏向车架1头部的一端与车架1铰接;支撑杆64偏向车架1尾部的一端铰接有传动杆65;传动杆65两端通过轴承座固定在车架1上;抬升器62包括底座621、伸缩丝杠622、缓冲弹簧623和转把624;底座621位于支撑杆64上方,且底座621一端铰接在支撑杆64与车架1的铰接处;伸缩丝杠622设置在底座621远离支撑杆64的一端,伸缩丝杠622一端与底座621螺纹配合固定;伸缩丝杠622远离底座621的一端穿过车架1上端的架杆伸出至车架1上方;缓冲弹簧623套在伸缩丝杠622外,并设置在底座621和车架1上端的架杆之间;转把624设置在伸缩丝杠622伸出车架1的一端。
压实辊61通过其两侧的支撑杆64铰接在车架1上,并通过抬升器62对压实辊61的高度进行自由调节;车辆作业时,压实辊61位于工作位置,此时与地面接触;车辆非工作状态下,通过操作抬升器62,将压实辊61抬高,压实辊61脱离地面,此时能够避免压实辊61受地面碎石障碍,保障车辆非工作状态下移动时的稳定性;并且,抬升器62采用伸缩丝杠622配合转把624,只需要人工手动转动转把624,控制伸缩丝杠622伸长或收缩,进而带动压实辊61进行高度调节即可,操作简单。
压实辊61两侧在转轴和传动杆65之间分别设置有皮带传动,皮带传动位于支撑杆64的外侧;传动杆65其中一端伸入移动底盘2的履带内,并在其一端设置有传动轮与履带配合;压实辊61与移动底盘2其中一组的履带式车轮传动连接,借用车轮的动力驱动压实辊61转动。刮料板63设置在挡座52与压实辊61之间,刮料板63与车架1螺纹配合固定;刮料板63靠近压实辊61的一端与压实辊61的表面贴合;刮料板63作用是在车辆工作状态时,将黏粘在压实辊61表面的杂料刮除,避免杂料破坏围堰成型。
电控系统7包括控制器71、接触开关72和遥控器73;接触开关72螺纹配合固定在挡座52内,接触开关72与控制器71电连接;遥控器73与控制器71无线连接;所述液压站8设置在车架1上方,控制器71设置在液压站8一侧;液压站8包括液压泵和油箱;液压泵和油箱油路连接;液压泵分别与第一液压马达、第二液压马达和第三液压马达45油路连接;动力装置3包括柴油发动机组;柴油发动机组与液压泵机械连接;控制器71分别与第一液压马达、第二液压马达、第三液压马达45通过电磁阀连接;控制器71与柴油发动机组电连接。
接触开关72的作用在于,当取料装置4输送的填料高于定型板51后,填料向挡座52倾斜,当填料将挡座52的开合门推动到触发接触开关72时,接触开关72向控制器71反馈信号,控制器71控制车辆前进,并驱动压实辊61对填料进行压实作业。
本发明采用液压系统来控制移动底盘2和取料装置4,通过控制第一液压马达、第二液压马达能够操作车辆的前进和后退,还可以利用两侧履带式车轮之间的差速用来操作车辆转向;通过控制第三液压马达45能够操作中空螺旋叶片43的工作转速,进而控制取料装置4的取料速度;由于压实装置6中的压实辊61和移动底盘2其中一侧的履带式车轮之间设置有皮带传动,因此在相应履带式车轮运行的过程中,即可带动压实辊61旋转。
本发明还设计有遥控器73,能够采用人工远程遥控技术操作车辆作业,便于人员操作车辆,同时也避免人员的作业风险。
本实施例的具体使用方式与作用:
首先车辆要处于工作位置,此时取料板42应插入货垛中,压实辊61应接触地面;之后启动第三液压马达45,控制中空螺旋叶片43作业,中空螺旋叶片43将落入取料板42内的矿石经搅笼41运输,从送料口411输送到定型板51内作为填料,填料在定型板51内初步定型;当填料堆积到超过定型板51的高度时,填料向挡座52倾斜,填料推动挡座52的开合门,直至开合门触发接触开关72,接触开关72向控制器71反馈信号,控制器71向第一液压马达和第二液压马达发出信号,启动车辆前进,车辆前进的过程中,压实辊61通过移动底盘2传动,也会同时进行转动,压实辊61边转动边移动,对填料进行压实固定;车辆前行的过程中,高于定型板51的填料被推到地面上,此时挡座52的开合门失去挤压力复位,复位后车辆停止前进,之后待开合门再次受压触发接触开关72时,车辆继续前行对填料进行压实,如此重复动作,走完全程即可完成货垛围堰作业。
其中,若因货垛缺料,导致取料板42插不进货垛,无法取料时,操作人员通过手动拆卸重装取料板42在搅笼41上的安装位置,调整取料板42在搅笼41一端的伸出长度,并手动操作螺栓442,改变螺栓442在升降板441行程槽上的位置,进而调整搅笼41的伸出角度,通过上述两种调整方案及其组合,将取料板42调整到伸入货垛的位置,即可继续取料进行作业。
当车辆在前进的过程中,操作人员可以遥控调整第一液压马达和第二液压马达的流量,利用移动底盘2两侧履带式车轮的差值,使车辆改变前进角度,达到车辆路线矫正以及车辆转向的目的。
综上所述,本发明设计了一种能够人工远程遥控的起垄围堰车,相对于传统的手工作业,解放了人力资源,提高了工作效率,有效解决了传统方案工作强度大、工作效率低的问题。
- 一种基于遥感场景分类的港口矿石堆场识别方法
- 一种基于遥感场景分类的港口矿石堆场识别方法