物料容器搬运机器人系统
文献发布时间:2023-06-19 09:54:18
技术领域
本发明属于智能制造物流转运行业设备技术领域,涉及一种物料容器搬运机器人系统。
背景技术
核化工行业、食品、化妆品及药品行业,物料容器的高效物流搬运是上市行业常见的作业形式。因此,通过自动化或者机器人化的物流搬运系统的开发,可大幅度提升上述行业的物料容器的物流效率。此外,在上述行业的生产过程中,还涉及到空物料容器和满物料容器与物料输送接口之间的快速更换,而采用移动单移动机械臂系统不仅负载很难满足要求,而且很难快速实现容器更换(需要倒手才能够实现)。如果采用双臂移动机器人系统,在满足操作要求的前提下,需要选择大负载机械臂,物流机器人系统体积、质量较大,成本也较高。
发明内容
本发明针对上述问题,提供一种物料容器搬运机器人系统,该机器人系统可以在无人或者没有其他辅助设备的支持下,快速、高效地实现物料容器的快速衔接更换,可保证智能制造领域物料容器转运的高效和快捷性,显著提升生产效率。
按照本发明的技术方案:一种物料容器搬运机器人系统,其特征在于:包括自主导航全向移动小车,所述自主导航全向移动小车上安装两套相互独立的水平直线运动模块,每组所述水平直线运动模块上分别安装一组竖直直线提升模块,竖直直线提升模块由水平直线运动模块驱动实现水平运动,竖直直线提升模块上安装物料容器夹持机构,物料容器夹持机构由竖直直线提升模块驱动实现升降运动,物料容器夹持机构实现对物料容器的夹持。
作为本发明的进一步改进,所述水平直线运动模块包括水平直线运动模块基座,水平直线运动模块基座安装于自主导航全向移动小车的上表面,水平直线运动模块基座的底面两端分别安装水平直线运动模块轴承座,水平直线运动丝杠两端转动支承于水平直线运动模块轴承座上,水平直线运动丝杠由水平直线运动模块基座端部安装的水平运动伺服电机驱动,水平直线运动丝杠上螺纹连接水平直线运动螺母,水平直线运动螺母的第一安装基座从水平直线运动模块基座的条形槽中伸出,并与竖直直线提升模块的提升模块基座固定连接;
所述水平直线运动模块基座的上表面平行布置两条水平直线运动模块导轨,提升模块基座底面固定的水平直线运动模块滑块与水平直线运动模块导轨滑动配合连接。
作为本发明的进一步改进,所述竖直直线提升模块包括竖直直线提升模块基座,竖直直线提升模块基座的一侧表面上、下两端分别安装竖直直线提升模块轴承座,竖直直线提升模块丝杆两端分别转动支承于竖直直线提升模块轴承座上,竖直直线提升模块伺服电机通过支座安装于竖直直线提升模块基座的上部,竖直直线提升模块伺服电机驱动竖直直线提升模块丝杆,竖直直线提升模块丝杆上螺纹连接竖直直线提升模块丝母,竖直直线提升模块丝母与第二安装基座固定连接,第二安装基座从竖直直线提升模块基座表面开设的槽中伸出,并与物料容器夹持机构固定连接;
所述竖直直线提升模块基座上还平行设置两条竖直直线提升模块导轨,物料容器夹持机构通过竖直直线提升模块滑块与竖直直线提升模块导轨滑动配合。
作为本发明的进一步改进,所述物料容器夹持机构包括安装底板,安装底板上安装夹持臂安装基座,安装底板上还安装驱动电机部件,驱动电机部件的输出端穿过夹持臂安装基座的中心孔,夹持臂安装基座转动设置左右旋一体丝杠,驱动电机部件的输出端与左右旋一体丝杠之间通过传动锥齿轮副实现啮合传动,左右旋一体丝杠上还设置有相互配合作用的左夹持臂、右夹持臂,所述左夹持臂上固定左旋螺母,右夹持臂上固定右旋螺母,所述左旋螺母、右旋螺母分别与左右旋一体丝杠螺纹配合,所述夹持臂安装基座还设置有导向部件以对左夹持臂、右夹持臂的移动进行导向;左右旋一体丝杠端部设置左右旋一体丝杠端盖。
作为本发明的进一步改进,所述导向部件包括支撑于夹持臂安装基座上的自润滑直线轴承导柱,左夹持臂、右夹持臂分别通过自润滑直线轴承与自润滑直线轴承导柱相配合,自润滑直线轴承配合设置自润滑直线轴承端盖。
本发明的技术效果在于:本发明产品结构合理巧妙,通过在自主导航全向移动小车(AGV)上安装两套相对独立的水平直线运动模块、竖直直线提升模块以及物料容器夹持机构,构成两套独立的而具有物料容器夹持、水平转运以及竖直提升功能的子系统。这种具有两套独立物料容器取转运的机器人化物流搬运系统,可在无人或者没有其他辅助设备的支持下,快速、高效地实现物料容器的快速衔接更换,可保证智能制造领域物料容器转运的高效和快捷性,显著提升生产效率。
附图说明
图1为本发明的结构示意图。
图2为本发明的主视图。
图3为本发明的立体图。
图4为本发明的竖直直线提升模块与物料容器夹持机构的结构示意图。
图5为本发明的竖直直线提升模块与物料容器夹持机构的工作状态示意图。
图6a~6c为本发明的工作流程图。
具体实施方式
下面结合附图对本发明的具体实施方式作进一步的说明。
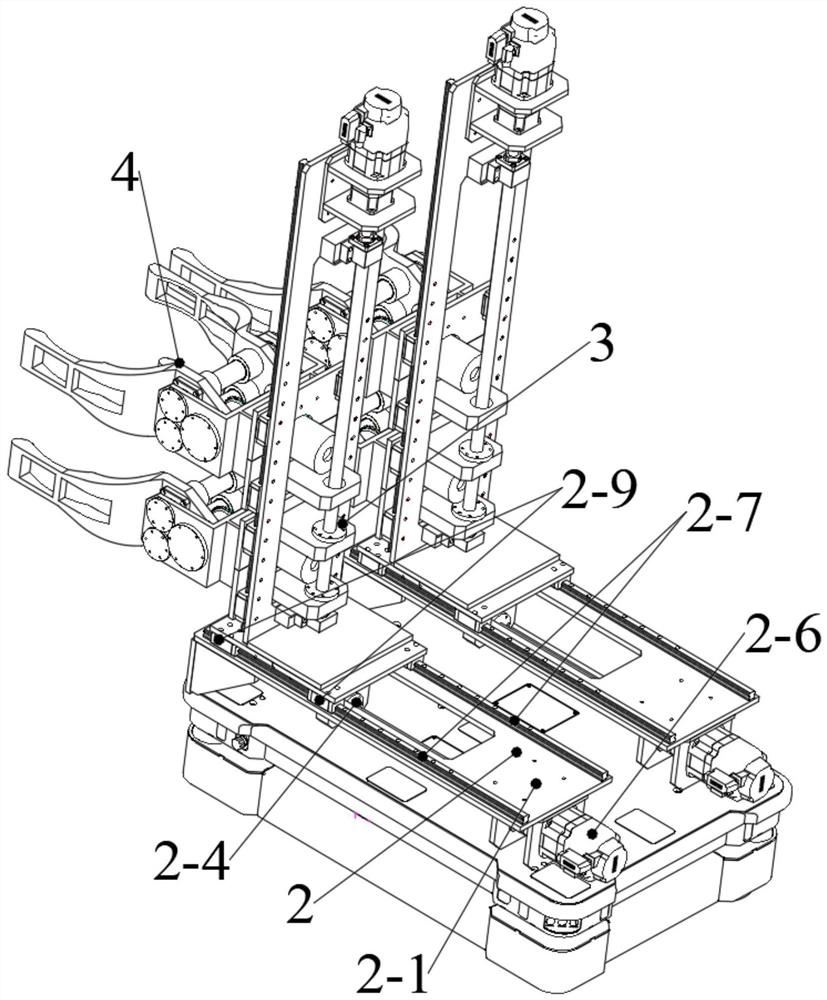
图1~6c中,包括自主导航全向移动小车1、水平直线运动模块2、水平直线运动模块基座2-1、水平直线运动模块轴承座2-2、水平直线运动丝杠2-3、水平直线运动螺母2-4、水平运动伺服电机2-6、水平直线运动模块导轨2-7、第一安装基座2-8、水平直线运动模块滑块2-9、竖直直线提升模块3、竖直直线提升模块基座3-1、竖直直线提升模块滑块3-2、竖直直线提升模块丝母3-3、第二安装基座3-4、竖直直线提升模块导轨3-5、竖直直线提升模块丝杆3-6、竖直直线提升模块轴承座3-7、物料容器夹持机构4、安装底板4-1、驱动电机部件4-2、左旋螺母4-3、传动锥齿轮副4-4、自润滑直线轴承4-5、左右旋一体丝杠4-6、左夹持臂4-7、自润滑直线轴承导柱4-8、右旋螺母4-9、右夹持臂4-10、自润滑直线轴承端盖4-11、左右旋一体丝杠端盖4-12、夹持臂安装基座4-13等。
如图1~6c所示,本发明是一种物料容器搬运机器人系统,包括自主导航全向移动小车1,所述自主导航全向移动小车1上安装两套相互独立的水平直线运动模块2,每组所述水平直线运动模块2上分别安装一组竖直直线提升模块3,竖直直线提升模块3由水平直线运动模块2驱动实现水平运动,竖直直线提升模块3上安装物料容器夹持机构4,物料容器夹持机构4由竖直直线提升模块3驱动实现升降运动,物料容器夹持机构4实现对物料容器的夹持。从而一套物料容器机器人化物流搬运系统可同时或者交替操作两个物料容器,可在无人干预或者无其他辅助设备支持下,实现空物料容器和满物料容器的切换,从而保证物料容器的切换的无缝衔接和流畅性。
水平直线运动模块2包括水平直线运动模块基座2-1,水平直线运动模块基座2-1安装于自主导航全向移动小车1的上表面,水平直线运动模块基座2-1的底面两端分别安装水平直线运动模块轴承座2-2,水平直线运动丝杠2-3两端转动支承于水平直线运动模块轴承座2-2上,水平直线运动丝杠2-3由水平直线运动模块基座2-1端部安装的水平运动伺服电机2-6驱动,水平直线运动丝杠2-3上螺纹连接水平直线运动螺母2-4,水平直线运动螺母2-4的第一安装基座2-8从水平直线运动模块基座2-1的条形槽中伸出,并与竖直直线提升模块3的提升模块基座3-1固定连接。水平直线运动螺母2-4与水平直线运动丝杠2-3组成水平直线运动螺母副。
水平直线运动模块基座2-1的上表面平行布置两条水平直线运动模块导轨2-7,提升模块基座3-1底面固定的水平直线运动模块滑块2-9与水平直线运动模块导轨2-7滑动配合连接。水平直线运动模块滑块2-9与水平直线运动模块导轨2-7构成水平直线运动导轨滑块副。在实际生产中,通常提升模块基座3-1底面固定四个水平直线运动模块滑块2-9,四个水平直线运动滑块2-9呈两列布置,每列两个。
竖直直线提升模块3包括竖直直线提升模块基座3-1,竖直直线提升模块基座3-1的一侧表面上、下两端分别安装竖直直线提升模块轴承座3-7,竖直直线提升模块丝杆3-6两端分别转动支承于竖直直线提升模块轴承座3-7上,竖直直线提升模块伺服电机3-9通过支座3-8安装于竖直直线提升模块基座3-1的上部,竖直直线提升模块伺服电机3-9驱动竖直直线提升模块丝杆3-6,可以理解的是,在实践中,优选竖直直线提升模块伺服电机3-9的输出端通过减速器与水平直线运动丝杠3-6相连接。
竖直直线提升模块丝杆3-6上螺纹连接竖直直线提升模块丝母3-3,竖直直线提升模块丝母3-3与第二安装基座3-4固定连接,第二安装基座3-4从竖直直线提升模块基座3-1表面开设的槽中伸出,并与物料容器夹持机构4固定连接。
竖直直线提升模块基座3-1上还平行设置两条竖直直线提升模块导轨3-5,物料容器夹持机构4通过竖直直线提升模块滑块3-2与竖直直线提升模块导轨3-5滑动配合。
在具体生产实践中,每组竖直直线提升模块导轨3-5上滑动设置两组物料容器夹持机构4。
物料容器夹持机构4包括安装底板4-1,安装底板4-1通过竖直直线提升模块滑块3-2与竖直直线提升模块导轨3-5滑动配合连接,每个安装底板4-1上设置四个竖直直线提升模块滑块3-2,四个竖直直线提升模块滑块3-2分成两列,每列两个竖直直线提升模块滑块3-2分别与相对应的竖直直线提升模块导轨3-5滑动配合连接。
安装底板4-1上安装夹持臂安装基座4-13,安装底板4-1上还安装驱动电机部件4-2,驱动电机部件4-2的输出端穿过夹持臂安装基座4-13的中心孔,夹持臂安装基座4-13转动设置左右旋一体丝杠4-6,驱动电机部件4-2的输出端与左右旋一体丝杠4-6之间通过传动锥齿轮副4-4实现啮合传动,左右旋一体丝杠4-6上还设置有相互配合作用的左夹持臂4-7、右夹持臂4-10,所述左夹持臂4-7上固定左旋螺母4-3,右夹持臂4-10上固定右旋螺母4-9,所述左旋螺母4-3、右旋螺母4-9分别与左右旋一体丝杠4-6螺纹配合,所述夹持臂安装基座4-13还设置有导向部件以对左夹持臂4-7、右夹持臂4-10的移动进行导向;左右旋一体丝杠4-6端部设置左右旋一体丝杠端盖4-12。在工作时,驱动电机部件4-2经由传动锥齿轮副4-4驱动左右旋一体丝杠4-6旋转,左右旋一体丝杠4-6的两端分别与左旋螺母4-3、右旋螺母4-9相配合,当左右旋一体丝杠4-6转动时,能够实现左夹持臂4-7、右夹持臂4-10的相互靠近或远离,可以理解的是,左右旋一体丝杠4-6的两端部螺纹旋向相反,由驱动电机部件4-2驱动实现对物料容器的强力夹持。
导向部件包括支撑于夹持臂安装基座4-13上的自润滑直线轴承导柱4-8,左夹持臂4-7、右夹持臂4-10分别通过自润滑直线轴承4-5与自润滑直线轴承导柱4-8相配合,自润滑直线轴承4-5配合设置自润滑直线轴承端盖4-11。
本发明新型产品在工作时,自主导航全向移动小车1(AGV)实现各个方向的运动,以将物料容器夹持至合适的地方,水平直线运动模块2带动竖直直线提升模块3沿水平方向运动,物料容器夹持机构4能够根据需要在竖直直线提升模块3的表面根据需要进行相应升降运动。
- 物料容器搬运机器人系统
- 一种物料搬运机器人的执行装置、物料搬运系统和方法