超声可视化达芬奇智能机器人手术系统
文献发布时间:2023-06-19 10:11:51
技术领域
本发明涉及医疗器械技术领域,具体为超声可视化达芬奇智能机器人手术系统。
背景技术
达芬奇外科手术系统是一种高级机器人平台,其设计的理念是通过使用微创的方法,实施复杂的外科手术。达芬奇机器人由三部分组成:外科医生控制台、床旁机械臂系统、成像系统。达芬奇手术机器人增加视野角度;减少手部颤动,机器人“内腕”较腹腔镜更为灵活,能以不同角度在靶器官周围操作;较人手小,能够在有限狭窄空间工作;使术者在轻松工作环境工作,减少疲劳更集中精力;减少参加手术人员。
目前,使用达芬奇外科手术系统在进行手术过程中,至具有一个腹腔超声镜,只具有平面展示的效果,需要经验特别丰富的医务人员才可以看懂手术过程中成像系统所形成的图像,同时针对腹腔超声镜周围的结构组织不能很好的实时感知,导致容易出现损伤血管和其他组织的现象。
为此,本发明针对达芬奇机器人手术系统进行全面升级改造,提出一种超声可视化达芬奇智能机器人手术系统。
发明内容
本发明的目的在于提供超声可视化达芬奇智能机器人手术系统,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:超声可视化达芬奇智能机器人手术系统,包括床旁机械臂手术组件、视频成像系统和医师控制组件,所述床旁机械臂手术组件包括手术床体、机械臂和机械主机构成;所述视频成像系统包括显示器和超声成像显示器;所述医师控制组件包括控制台、立体成像视觉辅助组件和手术辅助椅;所述医师控制组件与床旁机械臂手术组件通讯连接,且控制床旁机械臂手术组件进行手术,所述床旁机械臂手术组件集成有超声传感器,所述超声传感器与视频成像系统耦合,所述视频成像系统内部设置有AI处理模块和视频改造软件。
优选的,所述机械臂的数量为多个,多个机械臂的末端分别安装有腹腔镜、可视化超声吸引刀、可视化电凝钩和手术机械爪,所述腹腔镜的表面安装有超声传感器,所述可视化超声吸引刀和可视化电凝钩的表面均安装有微型摄像头,多个所述机械臂均与机械主机连接,所述机械臂为七轴机械臂,通过控制台控制。
优选的,所述微型摄像头、超声传感器和腹腔镜均与成像系统耦合。
优选的,所述手术床体的支撑腿中部安装有电动升降杆,所述电动升降杆的数量至少为四个,多个电动升降杆均与控制台通讯连接。
优选的,所述显示器安装在控制台的正面,所述超声成像显示器安装在控制台的侧面,所述超声成像显示器的正面安装有立体成像视觉辅助组件,所述立体成像视觉辅助组件包括开设在超声成像显示器正面的滑槽,所述滑槽的内壁转动连接有丝杠,所述超声成像显示器的侧面固定连接有伺服电机,所述伺服电机的输出轴延伸至滑槽的内部与丝杠固定连接,所述丝杠的表面螺纹连接有滑台,所述滑台和丝杠的数量均为两组,两个所述滑台的正面通过轴承固定连接有一个竖丝杆,所述竖丝杆的表面螺纹连接有一个透明台,所述透明台的正面安装有一块3D镜片。
优选的,所述3D镜片的正面安装有瞳孔追踪器,所述瞳孔追踪器与控制台内部主板耦合,所述滑台的正面表面固定连接有驱动竖丝杆转动的数控伺服电机,所述伺服电机和数控伺服电机均与控制台内部主板连接。
优选的,所述手术辅助椅为可升降式结构,且手术辅助椅靠背部分设置有散热风扇,所述手术辅助椅的靠背背面安装有蓄电池,所述手术辅助椅的扶手下方固定连接有储液罐,所述储液罐的内部插接有吸管,所述扶手的上表面安装有不锈钢软管,所述吸管穿过不锈钢软管的一端固定连接有乳胶吮吸头。
优选的,所述控制台的正面安装有第一扩音对讲器,所述手术床体的侧面安装有第二扩音对讲器。
优选的,所述超声成像显示器的背面设置有处理主机,所述处理主机内部设置有AI处理模块和视频改造程序。
有益效果
本发明提供了超声可视化达芬奇智能机器人手术系统,具备以下有益效果:
1.该超声可视化达芬奇智能机器人手术系统,通过设置将带有超声传感器的腹腔镜,经腹壁穿刺套管插入腹腔,由于腹腔镜的超声传感器缩短了超声传感器与病变间的距离,从而降低了对超声深度的要求,因而可使用较高超声扫描频率来提高超声扫描的分辨率,避免腹壁和肠内气体等对超声波束的干扰,可以产生高度清晰的扫描图像。
2.该超声可视化达芬奇智能机器人手术系统,通过设置超声成像显示器,在原有现象系统基础上添加超声成像显示器,可显示机械臂上特制器械上的超声传感器所探测图像,通过医学专科视频改造,可使此显像与实际组织的大小、色彩相一致,通过与AI结合,自动识别并标注所探测组织的性质,例如血管,筋膜等,并可自动标注相应的量化参数,更加直观的显示。
3.该超声可视化达芬奇智能机器人手术系统,通过设置立体成像视觉辅助组件,方便手术操作者直观便捷的观看立体成像,从而无需佩戴3D眼镜,该系统可减少手术者在术中操作的出错率,提高手术精度,降低手术难度,为手术留存一定术中客观影像学资料,便于交流探讨。
附图说明
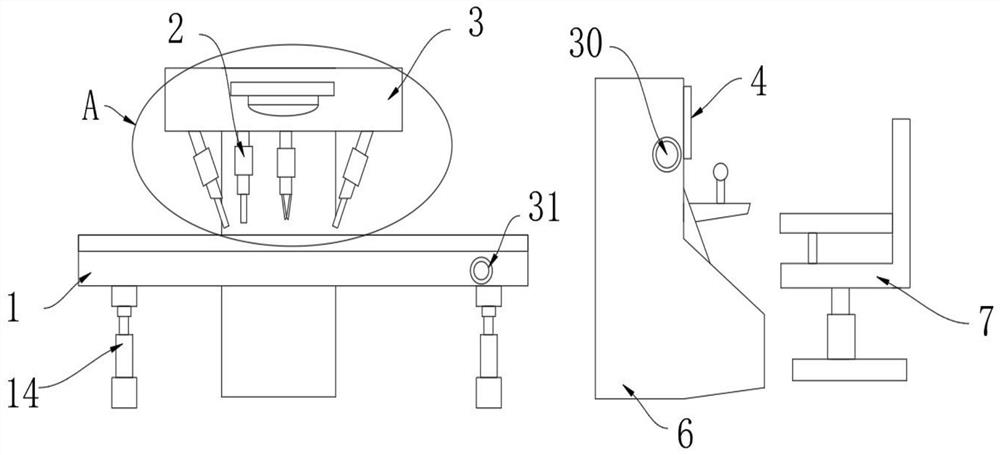
图1为本发明正视结构示意图;
图2为图1中A处放大结构示意图;
图3为本发明的控制台侧视结构示意图;
图4为图3中超声成像显示器放大结构示意图;
图5为本发明的手术辅助椅放大结构示意图。
图中:1手术床体、2机械臂、3机械主机、4显示器、5超声成像显示器、6控制台、7手术辅助椅、8超声传感器、9腹腔镜、10可视化超声吸引刀、11可视化电凝钩、12手术机械爪、13微型摄像头、14电动升降杆、15滑槽、16丝杠、17伺服电机、18滑台、19竖丝杆、20透明台、21 3D镜片、22数控伺服电机、23散热风扇、24蓄电池、25扶手、26储液罐、27吸管、28不锈钢软管、29乳胶吮吸头、30第一扩音对讲器、31第二扩音对讲器、32处理主机。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-5,本发明提供一种技术方案:超声可视化达芬奇智能机器人手术系统,包括床旁机械臂手术组件、视频成像系统和医师控制组件,床旁机械臂手术组件包括手术床体1、机械臂2和机械主机3构成;视频成像系统包括显示器4和超声成像显示器5;医师控制组件包括控制台6、立体成像视觉辅助组件和手术辅助椅7;医师控制组件与床旁机械臂手术组件通讯连接,且控制床旁机械臂手术组件进行手术,床旁机械臂手术组件集成有超声传感器8,超声传感器8与视频成像系统耦合,视频成像系统内部设置有AI处理模块和视频改造软件。
通过设置将带有超声传感器8的腹腔镜9,经腹壁穿刺套管插入腹腔,由于腹腔镜9的超声传感器8缩短了超声传感器8与病变间的距离,从而降低了对超声深度的要求,因而可使用较高超声扫描频率来提高超声扫描的分辨率,避免腹壁和肠内气体等对超声波束的干扰,可以产生高度清晰的扫描图像。
机械臂2的数量为多个,多个机械臂2的末端分别安装有腹腔镜9、可视化超声吸引刀10、可视化电凝钩11和手术机械爪12,腹腔镜9的表面安装有超声传感器8,可视化超声吸引刀10和可视化电凝钩11的表面均安装有微型摄像头13,多个机械臂2均与机械主机3连接,机械臂2为七轴机械臂,通过控制台6控制,微型摄像头13、超声传感器8和腹腔镜9均与成像系统耦合。
手术床体1的支撑腿中部安装有电动升降杆14,电动升降杆14的数量至少为四个,多个电动升降杆14均与控制台6通讯连接,控制台6的正面安装有第一扩音对讲器30,手术床体1的侧面安装有第二扩音对讲器31,通过设置两个对讲器便于主刀医师与助手沟通。
显示器4安装在控制台6的正面,超声成像显示器5安装在控制台6的侧面,超声成像显示器5的正面安装有立体成像视觉辅助组件,立体成像视觉辅助组件包括开设在超声成像显示器5正面的滑槽15,滑槽15的内壁转动连接有丝杠16,超声成像显示器5的侧面固定连接有伺服电机17,伺服电机17的输出轴延伸至滑槽15的内部与丝杠16固定连接,丝杠16的表面螺纹连接有滑台18,滑台18和丝杠16的数量均为两组,两个滑台18的正面通过轴承固定连接有一个竖丝杆19,竖丝杆19的表面螺纹连接有一个透明台20,透明台20的正面安装有一块3D镜片21,3D镜片21的正面安装有瞳孔追踪器,瞳孔追踪器与控制台6内部主板耦合,滑台18的正面表面固定连接有驱动竖丝杆19转动的数控伺服电机22,伺服电机17和数控伺服电机22均与控制台6内部主板连接,超声成像显示器5的背面设置有处理主机32,处理主机32内部设置有AI处理模块和视频改造程序,该超声可视化达芬奇智能机器人手术系统,通过设置立体成像视觉辅助组件,方便手术操作者直观便捷的观看立体成像,从而无需佩戴3D眼镜,该系统可减少手术者在术中操作的出错率,提高手术精度,降低手术难度。
手术辅助椅7为可升降式结构,且手术辅助椅7靠背部分设置有散热风扇23,手术辅助椅7的靠背背面安装有蓄电池24,手术辅助椅7的扶手25下方固定连接有储液罐26,储液罐26的内部插接有吸管27,扶手25的上表面安装有不锈钢软管28,吸管27穿过不锈钢软管28的一端固定连接有乳胶吮吸头29,通过设置手术辅助椅7便于为主刀医生进行散热和提供营养液增加体能。
该超声可视化达芬奇智能机器人手术系统,通过设置超声成像显示器5,在原有现象系统基础上添加超声成像显示器5,可显示机械臂2上特制器械上的超声传感器8所探测图像,通过医学专科视频改造,可使此显像与实际组织的大小、色彩相一致,通过与AI结合,自动识别并标注所探测组织的性质,例如血管,筋膜等,并可自动标注相应的量化参数,更加直观的显示。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 超声可视化达芬奇智能机器人手术系统
- 一种超声可视化达芬奇手术机器人手臂