一种车辆过弯超速预警方法和车辆过弯超速预警系统
文献发布时间:2023-06-19 11:27:38
技术领域
本发明属于交通控制技术领域,尤其涉及一种车辆过弯超速预警方法和车辆过弯超速预警系统。
背景技术
随着人们生活水平的提高和社会节奏的加快,机动车辆的使用变得越来越普遍,弯道比较容易发生交通事故,因此经常在弯道设置车速限制,经过车辆必须在车速限定范围之内行驶才能保证安全。但是,目前大部分车速限制提醒仅为交通警示牌的提醒,驾驶员往往因为各种原因而比较容易忽视,有时在驾车时还经常留意在某个路段是否有车速限制,分散了驾驶员的注意力,反而会影响行车安全,所以弯道速度预警技术是道路行车安全研究一个重要的课题。
发明内容
为解决上述技术问题,本发明提供了一种车辆过弯超速预警系统。
本发明通过以下技术方案得以实现。
本发明提供一种车辆过弯超速预警方法,所述车辆过弯超速预警方法用于车联网中在车辆驶入弯道处辅助车辆驾驶员进行安全驾驶,包括以下步骤:
步骤一:获取弯道信息和车辆信息;
步骤二:根据车辆的行驶方向和弯道的一条边的入弯方向是否相同,判断车辆是否驶向弯道;如果车辆没有驶向弯道,则继续获取弯道信息和车辆信息;如果车辆驶向弯道,则预警提示车辆距弯道距离和弯道限制速度,并进行步骤三;
步骤三:根据车辆的位置是否处于弯道覆盖的区域内和车辆信息判断车辆是否驶入弯道;如果车辆驶入弯道,则预警提示车辆的入弯速度,并进行步骤四;如果车辆尚未驶入弯道,则继续进行步骤二;
步骤四:根据车辆的当前速度与弯道的限制速度判断车辆是否超速;如果车辆的当前速度大于弯道的限制速度,则向车辆发送超速预警提示;否则进行步骤五;
步骤五:根据车辆的位置是否处于弯道覆盖的区域和车辆信息判断车辆是否驶出弯道;如果车辆未驶出弯道,则继续进行步骤四;否则结束。
所述车辆过弯超速预警方法中弯道信息包括弯道覆盖的区域、弯道地理位置、弯道曲率半径、弯道度数、弯道路面状况、入/出弯方向、弯道限制速度;车辆信息包括车辆速度、车辆行驶方向、车辆地理位置信息。
所述车辆过弯超速预警方法中弯道限制速度是根据弯道曲率半径、弯道度数和弯道路面状况计算出来。
所述车辆过弯超速预警方法步骤二中根据车辆的行驶方向和弯道的一条边的入弯方向是否相同是通过计算车辆行驶方向和入弯方向之间的夹角θ来确定;当车辆行驶方向和入弯方向之间的夹角θ小于30度或大于330度,判定车辆行驶方向和弯道一条边的入弯方向相同;
其中:θ=(α-β+360)%360;
θ表示车辆行驶方向和弯道一条边的入弯方向的夹角,其单位为度,α表示车辆行驶方向与由南向北穿过本车的经线之间的夹角,β表示弯道一条边的入弯方向与由南向北穿过弯道这条边的经线之间的夹角。
所述车辆过弯超速预警方法中弯道信息还包括预先通过弯道地理位置信息、弯道曲率半径、弯道度数、弯道路面状况、入/出弯方向构建弯道的入弯区和出弯区,确定入弯区四个顶点的坐标、出弯区四个顶点的坐标。
所述车辆过弯超速预警方法中车辆是否驶入弯道和车辆是否驶出弯道是先获取当前车辆的经纬度坐标,然后判断车辆的当前经纬度坐标是否在入弯区或出弯区;如果车辆的当前经纬度坐标在入弯区表示车辆驶入弯道,车辆的当前经纬度坐标在出弯区表示车辆驶出弯道。
所述车辆过弯超速预警方法步骤三中当车辆驶入弯道后,启动计时,计算车辆在弯道中行驶的时间;当车辆驶出弯道时,停止计时。
所述车辆过弯超速预警方法中当计时器计时的时间大于预定阈值MAX_T时,则判断车辆已驶出弯道,关闭预警提示;其中 MAX_T=4*π*R*γ/360,R为弯道的曲率半径,γ为弯道的弯曲角度。
此外,本发明还提供了车辆过弯超速预警系统,所述系统包括路侧单元、车载终端,路侧单元根据弯道覆盖的区域、弯道地理位置、弯道曲率半径、弯道度数、弯道路面状况、入/出弯方向计算出弯道限制速度并周期性的向外广播弯道信息;车载终端获取车辆信息,并接收路侧单元广播的路侧单元的弯道信息,并根据弯道信息和车辆信息向驾驶员进行弯道速度预警提示。
本发明的有益效果在于:采用本发明的技术方案,相比现有技术,只需要车辆的GPS信息和路侧单元广播的一些简单弯道信息就可实现高效的预警且路侧单元铺设简单,不需要路基单元之间相互通信和协调;车辆通过车载GPS设备能够时刻获取车辆位置信息,路侧单元周期性的广播弯道信息可确保车辆收到相关弯道信息,从而准确判断出一个经纬度坐标是否在一个区域以内,因此能够准确判断车辆是否进入弯道和离开弯道而发出相应的预警。无线通信传输的数据少,通信开销小,而且车载单元和路侧单元都不需要大量的计算,只需要一些简单的判断就可以实现,所以比较高效。
附图说明
图1为本发明车辆过弯超速预警方法的原理图;
图2为本发明车辆过弯超速预警方法中经纬网示意图;
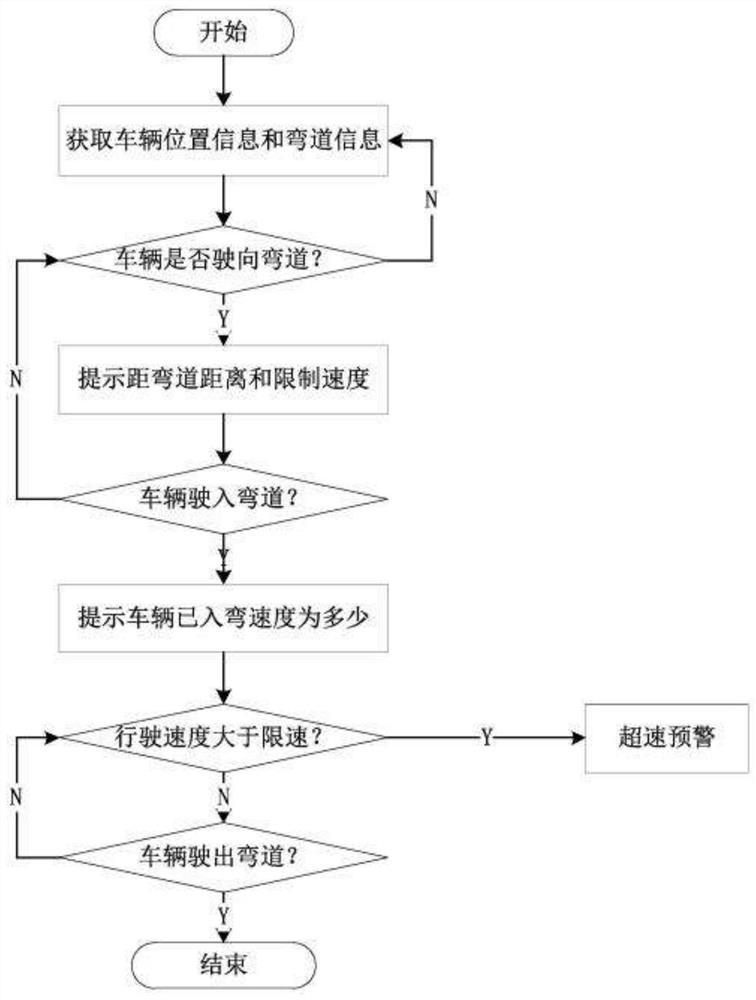
图3为本发明车辆过弯超速预警方法的流程图。
具体实施方式
下面进一步描述本发明的技术方案,但要求保护的范围并不局限于所述。
本发明提供一种车辆过弯超速预警方法,如图1、图2和图3所示,车辆过弯超速预警方法用于车联网中在车辆驶入弯道处辅助车辆驾驶员进行安全驾驶,包括以下步骤:
步骤一:获取弯道信息和车辆信息;
步骤二:根据车辆的行驶方向和弯道的一条边的入弯方向是否相同,判断车辆是否驶向弯道;如果车辆没有驶向弯道,则继续获取弯道信息和车辆信息;如果车辆驶向弯道,则预警提示车辆距弯道距离和弯道限制速度,并进行步骤三;
步骤三:根据车辆的位置是否处于弯道覆盖的区域内和车辆信息判断车辆是否驶入弯道;如果车辆驶入弯道,则预警提示车辆的入弯速度,并进行步骤四;如果车辆尚未驶入弯道,则继续进行步骤二;
步骤四:根据车辆的当前速度与弯道的限制速度判断车辆是否超速;如果车辆的当前速度大于弯道的限制速度,则向车辆发送超速预警提示;否则进行步骤五;
步骤五:根据车辆的位置是否处于弯道覆盖的区域和车辆信息判断车辆是否驶出弯道;如果车辆未驶出弯道,则继续进行步骤四;否则结束。
进一步地,车辆过弯超速预警方法中弯道信息包括弯道覆盖的区域、弯道地理位置、弯道曲率半径、弯道度数、弯道路面状况、入/ 出弯方向、弯道限制速度;车辆信息包括车辆速度、车辆行驶方向、车辆地理位置信息。车辆过弯超速预警方法中弯道限制速度是根据弯道曲率半径、弯道度数和弯道路面状况计算出来。
另外,步骤二中根据车辆的行驶方向和弯道的一条边的入弯方向是否相同是通过计算车辆行驶方向和入弯方向之间的夹角θ来确定;当车辆行驶方向和入弯方向之间的夹角θ小于30度或大于330 度,判定车辆行驶方向和弯道一条边的入弯方向相同;
其中:θ=(α-β+360)%360;
θ表示车辆行驶方向和弯道一条边的入弯方向的夹角,其单位为度,α表示车辆行驶方向与由南向北穿过本车的经线之间的夹角,β表示弯道一条边的入弯方向与由南向北穿过弯道这条边的经线之间的夹角。
此外,车辆过弯超速预警方法中弯道信息还包括预先通过弯道地理位置信息、弯道曲率半径、弯道度数、弯道路面状况、入/出弯方向构建弯道的入弯区和出弯区,确定入弯区四个顶点的坐标、出弯区四个顶点的坐标。
进一步地,车辆过弯超速预警方法中车辆是否驶入弯道和车辆是否驶出弯道是先获取当前车辆的经纬度坐标,然后判断车辆的当前经纬度坐标是否在入弯区或出弯区;如果车辆的当前经纬度坐标在入弯区表示车辆驶入弯道,车辆的当前经纬度坐标在出弯区表示车辆驶出弯道。
此外,车辆过弯超速预警方法步骤三中当车辆驶入弯道后,启动计时,计算车辆在弯道中行驶的时间;当车辆驶出弯道时,停止计时。优选车辆过弯超速预警方法中当计时器计时的时间大于预定阈值 MAX_T时,则判断车辆已驶出弯道,关闭预警提示;其中MAX_T=4*π*R*γ/360,R为弯道的曲率半径,γ为弯道的弯曲角度。
另外,本发明还提供了一种车辆过弯超速预警系统,系统包括路侧单元、车载终端,路侧单元根据弯道覆盖的区域、弯道地理位置、弯道曲率半径、弯道度数、弯道路面状况、入/出弯方向计算出弯道限制速度并周期性的向外广播弯道信息;车载终端获取车辆信息,并接收路侧单元广播的路侧单元的弯道信息,并根据弯道信息和车辆信息向驾驶员进行弯道速度预警提示。
采用本发明的技术方案,相比现有技术,只需要车辆的GPS信息和路侧单元广播的一些简单弯道信息就可实现高效的预警且路侧单元铺设简单,不需要路基单元之间相互通信和协调;车辆通过车载 GPS设备能够时刻获取车辆位置信息,路侧单元周期性的广播弯道信息可确保车辆收到相关弯道信息,从而准确判断出一个经纬度坐标是否在一个区域以内,因此能够准确判断车辆是否进入弯道和离开弯道而发出相应的预警。无线通信传输的数据少,通信开销小,而且车载单元和路侧单元都不需要大量的计算,只需要一些简单的判断就可以实现,所以比较高效。
- 一种车辆过弯超速预警方法和车辆过弯超速预警系统
- 一种基于车路协同的超大型公交车辆过弯预警系统及方法