一种智能四行玉米收获机
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及农用机械技术领域,具体为一种智能四行玉米收获机。
背景技术
玉米是禾本科的一年生草本植物,又名苞谷、苞米棒子、玉蜀黍、珍珠米等,原产于中美洲和南美洲,是世界重要的粮食作物,广泛分布于美国、中国、巴西和其他国家。玉米具有很强的耐旱性、耐寒性、耐贫瘠性以及极好的环境适应性,营养价值较高。作为中国的高产粮食作物,玉米是畜牧业和养殖业的重要饲料来源,也是食品、医疗卫生、化工业等的不可或缺的原料之一。玉米还具有许多生物活性,如抗氧化、抗肿瘤、降血糖、提高免疫力和抑菌杀菌等,其具有广阔的开发及应用前景。目前,收获玉米时的果穗剥皮工作主要靠人工来完成,费工费力,效率低。
现有的智能型玉米联合收割机体积大,不但费用成本都很高,而且果穗剥皮净率低,往往还需要二次人工剥皮。其中智能型玉米联合收割机上的剥皮机采用双辊相对转动,玉米棒自双辊之间穿过,在双辊转动的同时将其剥皮,在当玉米外衣与玉米包裹严实时,容易出现剥皮不净现象。因此我们对此做出改进,提出一种智能四行玉米收获机。
发明内容
为解决现有技术存在的缺陷,本发明提供一种智能四行玉米收获机。
为了解决上述技术问题,本发明提供了如下的技术方案:
本发明一种智能四行玉米收获机,包括玉米收获机主体,所述玉米收获机主体的前端设有立式切割台,所述玉米收获机主体的中部设有玉米剥皮机构,所述玉米剥皮机构的进料端设有玉米外衣扒皮机构,所述玉米收获机主体上设有用于将立式切割台中的果穗输送到玉米外衣扒皮机构内的果穗输送器,所述玉米收获机主体上设有与玉米剥皮机构出料端连接的果穗箱,所述玉米收获机主体上还设有对秸秆进行粉碎的秸秆还田机构;所述玉米剥皮机构内还设有向外的吸风机;所述玉米收获机主体的底部前端设有前驱动轮,所述玉米收获机主体的底部后端设有后驱动轮。
作为本发明的一种优选技术方案,所述玉米外衣扒皮机构包括设置在玉米收获机主体上的导向送料机构,所述导向送料机构包括设置在玉米收获机主体上的进料漏斗,所述进料漏斗的底部设有竖直的进料管,所述进料管的下方设有导向板,所述导向板内设有朝向玉米剥皮机构的导向槽,所述导向槽内设有沿导向槽滑动的推进块,所述玉米收获机主体上设有驱动推进块沿着导向槽往复滑动的驱动机构;所述导向槽与玉米剥皮机构对接的端部设有玉米刮皮机构。
作为本发明的一种优选技术方案,所述推进块的前端设有延伸到推进块后端的凹槽,且推进块的前端底侧设有向前延伸的推料底板。
作为本发明的一种优选技术方案,所述进料管中的玉米呈竖直状态,且进料管底部与导向槽的底部之间的距离小于一个普通玉米的长度。
作为本发明的一种优选技术方案,所述玉米刮皮机构包括设置在导向板前端部的且与导向槽对接的内定位圈,所述导向板端部在内定位圈的外围设有外定位圈,所述外定位圈上铰接有多个端部对笼的刮皮杆,所述刮皮杆与内定位圈之间设有拉伸复位弹簧;所述刮皮杆的前端内壁上设有多个刮皮齿牙。
作为本发明的一种优选技术方案,所述驱动机构包括设置在推进块后端部的运动推杆,所述导向板上设有供运动推杆穿过的限位套筒,所述运动推杆的后端部设有与运动推杆垂直设置的推板,所述推板上设有竖直腰孔,所述玉米收获机主体上设置有驱动电机,所述驱动电机上设有转动杆,所述转动杆的端部设有伸入到竖直腰孔内的定位轴,所述定位轴的外端部设有限位块。
作为本发明的一种优选技术方案,所述定位轴经转动件与转动杆的端部转动连接。
作为本发明的一种优选技术方案,所述进料漏斗内设有防架桥机构,所述防架桥机构包括设置在进料漏斗上的定位架,所述定位架上设有竖直向下的转动轴,所述转动轴上设有翻料杆,所述定位架上固定有与转动轴传动连接的伺服电机。
作为本发明的一种优选技术方案,所述进料管的底部在沿玉米推进的方向设有功能腔。
本发明的有益效果是:1、该种智能四行玉米收获机,能对玉米进行一体化收获处理,其中是通过立式切割台来对玉米进行收获切割,并对玉米进行果穗以及秸秆进行分离,分离后的果穗则在果穗输送器的输送作用下进入到玉米外衣扒皮机构,来对包裹在玉米棒外围的外衣进行扒皮,然后扒皮后的玉米棒在进入到玉米剥皮机构进行剥皮,有效避免了因玉米与玉米棒紧密贴合在一起而使得玉米剥皮机构不能对其进行有效的剥皮,另外需要人工进行找出剥皮,增加了劳动强度,剥皮后的玉米棒则进入到果穗箱内进行集中收集,而秸秆则进入到秸秆还田机构内进行粉碎还田,从而实现对玉米的一体化收获。
1、该种智能四行玉米收获机通过设置特定的玉米外衣扒皮机构来对包裹在玉米表面的外衣进行扒皮,主要是利用导向送料机构进行导向,使得玉米以为一个特定的姿势进入到玉米剥皮机构内,其中果穗输送器将玉米送入到进料漏斗内,玉米在进料漏斗的作用下,以一个竖直的姿势进入到进料管内,则并落入到导向板内的导向槽内,则在驱动机构的推进作用下,将平躺在导向槽内的玉米送入到玉米刮皮机构内,来对玉米表面的外衣进行刮皮。其中推进块的前端设有延伸到推进块后端的凹槽,起到了调姿的作用,当对导向槽内的玉米进行推进时,上层的玉米呈竖直状态下落,则底部与凹槽接触,然后随着导向槽内的玉米进行推进时,则玉米底部与凹槽的竖直侧壁接触,并随着玉米的推进向前移动,从而将玉米的底部向前推进,来使得玉米呈水平状进入到到导向槽内,且推进块的前端底侧设有向前延伸的推料底板,当玉米是呈竖直状态或倾斜状态进入到导向槽时,玉米的底部与推料底板抵触,而此时玉米并未与推进块的前端抵触,在对玉米推进时,推料底板对玉米的底部向前推进,最终使得玉米呈平躺姿势进入到导向槽内,而便于将玉米准确的推进到玉米刮皮机构内进行刮皮。
2、该种智能四行玉米收获机通过设置特定的玉米刮皮机构来对玉米进行刮皮,主要是通过导向送料机构进行玉米送入到玉米刮皮机构内,则玉米进入到端部对笼的刮皮杆之间,在拉伸复位弹簧的作用下,随着玉米的推进,刮皮杆的前端内壁上的多个刮皮齿牙来对玉米外围的外皮进行撕扯扒开,而便于玉米剥皮机构进行剥皮,其中刮皮杆与内定位圈之间设有拉伸复位弹簧,可对不同粗细的玉米棒进行剥皮。
3、该种智能四行玉米收获机进料漏斗内设有防架桥机构,来对进入到进料漏斗内的玉米进行打散防止在进料管的关口处发生架桥现象而不能进行持续进料。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
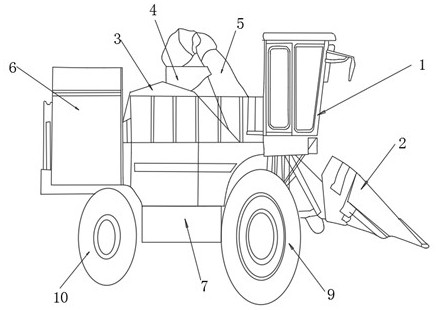
图1是本发明一种智能四行玉米收获机的结构示意图;
图2是本发明一种智能四行玉米收获机的玉米外衣扒皮机构的结构示意图;
图3是本发明一种智能四行玉米收获机的玉米刮皮机构的结构示意图;
图4是本发明一种智能四行玉米收获机的推料底板的调姿状态图;
图5是本发明一种智能四行玉米收获机的防架桥机构的结构示意图;
图6是本发明一种智能四行玉米收获机的定位轴的连接示意图。
图中:1、玉米收获机主体;2、立式切割台;3、玉米剥皮机构;4、玉米外衣扒皮机构;5、果穗输送器;6、果穗箱;7、秸秆还田机构;8、吸风机;9、前驱动轮;10、后驱动轮;11、导向送料机构;12、进料漏斗;13、进料管;14、导向板;15、导向槽;16、推进块;17、驱动机构;18、玉米刮皮机构;19、凹槽;20、推料底板;21、内定位圈;22、外定位圈;23、刮皮杆;24、拉伸复位弹簧;25、刮皮齿牙;26、推进块;27、运动推杆;28、推板;29、竖直腰孔;30、驱动电机;31、转动杆;32、定位轴;33、限位块;34、转动件;35、防架桥机构;36、定位架;37、转动轴;38、翻料杆;39、伺服电机;40、功能腔。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
实施例:如图1-6所示,本发明一种智能四行玉米收获机,包括玉米收获机主体1,所述玉米收获机主体1的前端设有立式切割台2,所述玉米收获机主体1的中部设有玉米剥皮机构3,所述玉米剥皮机构3的进料端设有玉米外衣扒皮机构4,所述玉米收获机主体1上设有用于将立式切割台2中的果穗输送到玉米外衣扒皮机构4内的果穗输送器5,所述玉米收获机主体1上设有与玉米剥皮机构3出料端连接的果穗箱6,所述玉米收获机主体1上还设有对秸秆进行粉碎的秸秆还田机构7;所述玉米剥皮机构3内还设有向外的吸风机8;所述玉米收获机主体1的底部前端设有前驱动轮9,所述玉米收获机主体1的底部后端设有后驱动轮10,能对玉米进行一体化收获处理,其中是通过立式切割台2来对玉米进行收获切割,并对玉米进行果穗以及秸秆进行分离,分离后的果穗则在果穗输送器5的输送作用下进入到玉米外衣扒皮机构4,来对包裹在玉米棒外围的外衣进行扒皮,然后扒皮后的玉米棒在进入到玉米剥皮机构3进行剥皮,有效避免了因玉米与玉米棒紧密贴合在一起而使得玉米剥皮机构3不能对其进行有效的剥皮,另外需要人工进行找出剥皮,增加了劳动强度,剥皮后的玉米棒则进入到果穗箱6内进行集中收集,而秸秆则进入到秸秆还田机构7内进行粉碎还田,从而实现对玉米的一体化收获。
其中,所述玉米外衣扒皮机构4包括设置在玉米收获机主体1上的导向送料机构11,所述导向送料机构11包括设置在玉米收获机主体1上的进料漏斗12,所述进料漏斗12的底部设有竖直的进料管13,所述进料管13的下方设有导向板14,所述导向板14内设有朝向玉米剥皮机构3的导向槽15,所述导向槽15内设有沿导向槽15滑动的推进块16,所述玉米收获机主体1上设有驱动推进块16沿着导向槽15往复滑动的驱动机构17;所述导向槽15与玉米剥皮机构3对接的端部设有玉米刮皮机构18,通过设置特定的玉米外衣扒皮机构4来对包裹在玉米表面的外衣进行扒皮,主要是利用导向送料机构11进行导向,使得玉米以为一个特定的姿势进入到玉米剥皮机构3内,其中果穗输送器5将玉米送入到进料漏斗12内,玉米在进料漏斗12的作用下,以一个竖直的姿势进入到进料管13内,则并落入到导向板14内的导向槽内,则在驱动机构17的推进作用下,将平躺在导向槽内的玉米送入到玉米刮皮机构18内,来对玉米表面的外衣进行刮皮。其中推进块16的前端设有延伸到推进块16后端的凹槽19,起到了调姿的作用,当对导向槽内的玉米进行推进时,上层的玉米呈竖直状态下落,则底部与凹槽19接触,然后随着导向槽内的玉米进行推进时,则玉米底部与凹槽19的竖直侧壁接触,并随着玉米的推进向前移动,从而将玉米的底部向前推进,来使得玉米呈水平状进入到到导向槽内,且推进块16的前端底侧设有向前延伸的推料底板20,当玉米是呈竖直状态或倾斜状态进入到导向槽时,玉米的底部与推料底板20抵触,而此时玉米并未与推进块16的前端抵触,在对玉米推进时,推料底板20对玉米的底部向前推进,最终使得玉米呈平躺姿势进入到导向槽内,而便于将玉米准确的推进到玉米刮皮机构18内进行刮皮。
其中,所述进料管13中的玉米呈竖直状态,且进料管13底部与导向槽15的底部之间的距离小于一个普通玉米的长度。
其中,本发明智能四行玉米收获机中的四行是指割台能够同时收割四行玉米。
其中,所述玉米刮皮机构18包括设置在导向板14前端部的且与导向槽15对接的内定位圈21,所述导向板14端部在内定位圈21的外围设有外定位圈22,所述外定位圈22上铰接有多个端部对笼的刮皮杆23,所述刮皮杆23与内定位圈21之间设有拉伸复位弹簧24;所述刮皮杆23的前端内壁上设有多个刮皮齿牙25,通过设置特定的玉米刮皮机构18来对玉米进行刮皮,主要是通过导向送料机构11进行玉米送入到玉米刮皮机构18内,则玉米进入到端部对笼的刮皮杆23之间,在拉伸复位弹簧24的作用下,随着玉米的推进,刮皮杆23的前端内壁上的多个刮皮齿牙25来对玉米外围的外皮进行撕扯扒开,而便于玉米剥皮机构3进行剥皮,其中刮皮杆23与内定位圈21之间设有拉伸复位弹簧24,可对不同粗细的玉米棒进行剥皮。
其中,所述驱动机构17包括设置在推进块16后端部的运动推杆26,所述导向板14上设有供运动推杆26穿过的限位套筒27,所述运动推杆26的后端部设有与运动推杆26垂直设置的推板28,所述推板28上设有竖直腰孔29,所述玉米收获机主体1上设置有驱动电机30,所述驱动电机30上设有转动杆31,所述转动杆31的端部设有伸入到竖直腰孔29内的定位轴32,所述定位轴32的外端部设有限位块33,结构简单,能够进行频繁的往复推进动作。
所述定位轴32经转动件34与转动杆31的端部转动连接。
所述进料漏斗12内设有防架桥机构35,所述防架桥机构35包括设置在进料漏斗12上的定位架36,所述定位架36上设有竖直向下的转动轴37,所述转动轴37上设有翻料杆38,所述定位架36上固定有与转动轴37传动连接的伺服电机39,来对进入到进料漏斗12内的玉米进行打散防止在进料管13的关口处发生架桥现象而不能进行持续进料。
所述进料管13的底部在沿玉米推进的方向设有功能腔40,避免在玉米调整时与进料管13的底部的外侧发生抵触,而使得玉米不能平躺到导向槽15内。
工作原理:通过立式切割台2来对玉米进行收获切割,并对玉米进行果穗以及秸秆进行分离,分离后的果穗则在果穗输送器5的输送作用下进入到玉米外衣扒皮机构4,来对包裹在玉米棒外围的外衣进行扒皮,然后扒皮后的玉米棒在进入到玉米剥皮机构3进行剥皮,有效避免了因玉米与玉米棒紧密贴合在一起而使得玉米剥皮机构3不能对其进行有效的剥皮,另外需要人工进行找出剥皮,增加了劳动强度,剥皮后的玉米棒则进入到果穗箱6内进行集中收集,而秸秆则进入到秸秆还田机构7内进行粉碎还田,从而实现对玉米的一体化收获,通过设置特定的玉米外衣扒皮机构4来对包裹在玉米表面的外衣进行扒皮,主要是利用导向送料机构11进行导向,使得玉米以为一个特定的姿势进入到玉米剥皮机构3内,其中果穗输送器5将玉米送入到进料漏斗12内,玉米在进料漏斗12的作用下,以一个竖直的姿势进入到进料管13内,则并落入到导向板14内的导向槽内,则在驱动机构17的推进作用下,将平躺在导向槽内的玉米送入到玉米刮皮机构18内,来对玉米表面的外衣进行刮皮。其中推进块16的前端设有延伸到推进块16后端的凹槽19,起到了调姿的作用,当对导向槽内的玉米进行推进时,上层的玉米呈竖直状态下落,则底部与凹槽19接触,然后随着导向槽内的玉米进行推进时,则玉米底部与凹槽19的竖直侧壁接触,并随着玉米的推进向前移动,从而将玉米的底部向前推进,来使得玉米呈水平状进入到到导向槽内,且推进块16的前端底侧设有向前延伸的推料底板20,当玉米是呈竖直状态或倾斜状态进入到导向槽时,玉米的底部与推料底板20抵触,而此时玉米并未与推进块16的前端抵触,在对玉米推进时,推料底板20对玉米的底部向前推进,最终使得玉米呈平躺姿势进入到导向槽内,而便于将玉米准确的推进到玉米刮皮机构18内进行刮皮。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种智能四行玉米收获机
- 一种行距可调的四行玉米收获机