用于流量控制设备的盒子
文献发布时间:2023-06-19 11:39:06
技术领域
本发明大致涉及一种带有流量控制设备和进给装置的流量控制系统,并且更特别地涉及一种与流量控制设备一起使用的盒子。
背景技术
给无法口服药物或营养成分的患者施用药物或营养成分可以通过利用蠕动流量控制系统来实现。通常,在这样的系统中,流体通过泵装置输送到患者,该泵装置包括装载在流量控制设备(诸如蠕动泵)上的柔性弹性体管件,该设备以可控的输送速度将流体输送到患者。蠕动泵通常具有外壳,该外壳包括通过齿轮箱可操作地接合到马达的转子。转子通过由转子上的一个或多个辊的撞击(例如夹紧)产生的可逆压缩所实现的蠕动作用来驱动流体通过泵装置的柔性管件。转子的旋转逐渐压缩弹性体管件,该弹性体管件以可控的速度驱动流体。泵装置可以具有用于允许或阻止流体流通过泵装置的连通的阀机构。流量控制系统还可以具有控制器,该控制器可操作地调节一个或多个马达,这有效地控制流体流动。
蠕动泵通过以“等分部分”的小排量输送流体来操作。转子与泵装置的弹性体管件接合,从而夹断弹性体管件的部分并且将流体推向夹紧点的前方,例如更接近患者而不是接近朝向患者的流体的源。通常,通过对等分部分的数量进行计数而在泵中控制要施用给患者的流体的体积,每个等分部分具有基本上相同的体积,并且当数量达到与要输送的流体的总期望体积对应的数量时停止。蠕动泵是卫生的并且一般是准确的,并且因此,在给患者施用药物和治疗流体时非常有用。
发明内容
在一个方面,与具有用于接合泵装置的泵送系统的泵送设备一起使用的盒子通常包括盒子主体,该盒子主体被配置成可释放地附接到泵送设备,以将盒子安装在泵送设备上。配件安装在盒子主体上,并且包括安装结构。至少一个识别构件通过安装结构安装在配件上,以用于指示泵装置的功能配置。安装结构和识别构件被配置成将识别构件以不同的取向安装在配件上,以指示盒子和泵装置的不同功能配置。
在另一方面,用于在泵装置的盒子中使用的配件组件通常包括主体,该主体包括入口端口和出口端口。主体被配置成用于附接到盒子。至少一个识别构件安装在主体上,以用于指示泵装置的功能配置。
在又一方面,与具有用于接合泵装置的泵送系统的泵送设备一起使用的盒子通常包括盒子主体,该盒子主体被配置成可释放地附接到泵送设备,以将盒子安装在泵送设备上。盒子主体具有至少一个安装构造。至少一个识别构件通过盒子主体的安装构造安装在盒子主体上。识别构件和安装构造形成为以多个预定取向中的任何一个取向安装识别构件。每个预定取向指示泵装置的不同功能配置。
在又另一方面,一种组装盒子的方法通常包括提供用于与泵送设备一起使用的盒子,该泵送设备具有用于接合泵装置的泵送系统。将至少一个识别构件安装到盒子,以用于指示泵装置的功能配置。
在再另一方面,流量控制系统通常包括流量控制设备,该流量控制设备包括泵送装置和传感器。泵装置包括盒子和安装到盒子的管件。盒子被配置成可释放地附接到流量控制设备,以将盒子和管件安装到流量控制设备。盒子具有至少一个安装构造和通过安装构造安装在盒子上的至少一个识别构件。识别构件和安装构造形成为以多个预定取向中的任何一个取向安装识别构件。每个预定取向指示泵装置的不同功能配置。传感器被配置成检测所述至少一个识别构件的存在和取向,以用于确定泵装置的功能配置。
附图说明
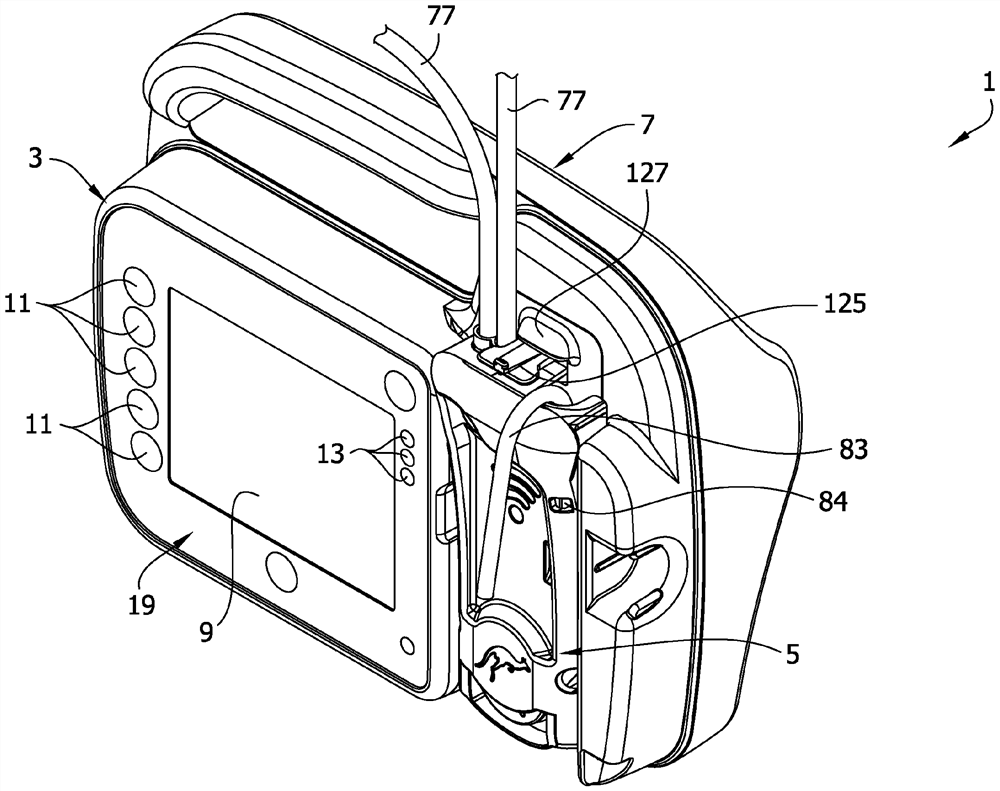
图1是具有泵送设备以及进给装置和盒子的片段部分的进给系统的透视图;
图2是图1的系统的透视图,但是盒子的部分被移除;
图3是没有进给装置和盒子的图1的透视图;
图4是盒子的前透视图;
图5是盒子的后透视图;
图6是盒子的后立视图;
图7是具有从盒子移除的装配组件的盒子的后透视图;
图8是装配组件的前透视图;
图9是装配组件的后透视图;
图10是移除了旋塞杆的装配组件的前透视图;
图11是杆的后透视图;
图12是杆的侧透视图;
图13是杆的横截面视图;
图14A是轴向磁化磁体的透视图;和
图14B是在直径方向上被磁化的磁体的透视图;
在所有附图中,对应的附图标记表示对应的部件。
具体实施方式
本发明的一个或多个方面涉及蠕动泵,诸如旋转蠕动泵,并且特别涉及利用具有用于在多个流体流动配置之间进行选择的阀的盒子的旋转蠕动泵。盒子还具有用于防止附接到盒子的出口管扭结的配置。提供或促进这些特征中的一种或多种的任何一个或多个有利特征或结构可以在各种商业和工业应用中所采用的蠕动泵中实施。因此,虽然详细的讨论涉及一种带有盒子的肠内进给泵,但是本发明的任何一个或多个特征可以在具有或不具有盒子的其他蠕动泵中具体实施或实施。例如,虽然示例性地讨论的泵是旋转蠕动肠内进给泵,但是本发明已经应用于其他类型的蠕动泵(未示出),包括医疗输液泵。除下文阐述外,肠内进给泵的一般构造和操作通常可与于2009年10月27日授权的题为“FLOW CONTROLAPPARATUS(流量控制设备)”的共同转让美国专利号7,608,059、于2006年8月15日授权的题为“FLOW MONITORING SYSTEM FOR A FLOW CONTROL APPARATUS(用于流量控制设备的流量监测系统)”的共同转让美国专利号7,092,797号和于2009年5月19日授权的题为“ALIQUOTCORRECTION FOR FEEDING SET DEGRADATION(用于进给装置劣化的等量校正)”的共同转让美国专利号7,534,099中所公开的相同。在不脱离本发明的范围的情况下,本发明的各个特征和方面中的一个或多个可以在使用除辊外的机构的蠕动泵(诸如线性蠕动泵)中实施。此外,虽然示出了示例性进给装置7,但是在不脱离本发明的范围的情况下,可以使用其他类型的泵装置(未示出)。
现在参照附图,并且特别参照图1至图3,根据本发明的原理中的任何一个或多个构造的示例性肠内进给泵(广泛称为“泵送设备”)通常用1表示。进给泵可以包括:外壳(通常用3表示),该外壳被构造为安装盒子(通常用5表示)和进给装置(广泛称为“泵装置”);片段部分(通常用7表示),该片段部分被可移除地容纳在盒子5中。盒子5能够可释放地附接到外壳3。在所示的实施例中,盒子5被可移除地容纳在外壳3(图3)中的盒子凹槽6中。将认识到,如本文中所使用的“外壳”可以包括许多形式的支撑结构(未示出),包括但不限于多部分结构和不封闭或容纳泵1的工作部件的结构。此外,本发明的各个方面和特征可以在没有凹槽6的情况下实施。泵1还可以具有在外壳3上的显示屏9,该显示屏9能够显示关于泵的状态和操作的信息。可以提供可以靠近显示屏9的一个或多个按钮11,用于控制和获得来自泵1的信息,并且一个或多个发光二极管13可以提供泵的状态信息。支腿(未示出)可以设置在外壳3的底部处,以支撑外壳,使得显示屏10略微向上倾斜,以方便用户或操作者观看。
显示屏9可以是外壳3的前面板(通常用19表示)的一部分,并且能够可移除地附接到外壳。肠内进给泵1可以进一步包括泵送单元(通常用23表示),该泵送单元包括连接到转子轴(未示出)的泵马达(未示出)。电池(未示出)可以被容纳在外壳3中,用于为泵马达供电。不同于电池的电源或除了电池以外的电源可以用于给泵通电,包括通过转子轴驱动泵送单元的一个或多个原动机。
泵送单元23可以具有转子(通常用37表示),该转子可以联接到转子轴。转子37可以包括内部圆盘39、外部圆盘41和四个辊43(只示出了其中三个),这些辊安装在内部圆盘与外部圆盘之间,用于围绕其纵向轴线相对于圆盘旋转(图2和图3)。辊43与进给装置7的管45(图2)接合,以在进给装置被容纳在盒子5中并且盒子附接到外壳3时通过进给装置将流体输送到受试者。也设想其他数量的辊。例如,在不脱离本公开的范围的情况下,也可以使用五个或六个辊。
参照图4至图7,盒子5可以包括盒子主体51,该盒子主体51具有前部53、后部55、顶部57和底部59。侧壁61和顶壁63可以从盒子主体51的后部55延伸,从而形成被配置成用于容纳配件65的后部空腔。管45(图2)可以附接到配件65。配件65可以具有允许配件65固定或卡扣到盒子中的凸舌84。在一些情况下,配件可以可移除地固定到盒子。
配件65可以包括底座67、入口端口69、出口端口71和杆保持器66。入口端口69可以包括用于插入管45的入口端中的第一附接部分73和用于容纳入口管件77(图2)的一对第二附接部分75A、75B。出口端口71可以包括用于接合或附接到管45的出口端(诸如通过插入管45的出口端中)的第一附接部分79和用于附接到出口管件83(诸如通过容纳出口管件83)的第二附接部分81。容纳出口管件83的第二附接部分81的开口可以从开口向下形成漏斗或逐渐变窄,以将管件固定在开口中。出口管件83也可以用溶剂处理以软化管,以便插入附接部分81中并且与附接部分81结合。第二附接部分75A可以被放置成与进给源(例如营养液体袋)流体连通,并且第二附接部分75B可以被放置成经由入口管件77与冲洗源(例如冲洗流体袋)流体连通。替代地,第二附接部分75B可以附接到进给源,并且第二附接部分75A可以附接到冲洗源。
管45、配件65、入口管件77和出口管件83可以包括泵装置7。还设想的是,盒子5可以被视为泵装置的一部分。在优选实施例中,盒子5由诸如聚碳酸酯的聚合物材料制成。
参照图8至图13,包括圆柱形杆68的旋塞被容纳在配件65的杆保持器66中的圆形开口70中的。杆68可在开口70中移动(即旋转),以选择性地将第二附接部分75A、75B与第一附接部分73连通,以将泵装置置于流体输送配置、冲洗配置或流体流动受阻配置中的一者中。第二附接部分75A、75B各自具有与配件65中的开口70连通的出口,并且第一附接部分73具有与配件中的开口连通的入口。杆68包括圆柱形主体72,该圆柱形主体72具有形成在主体中的第一开口74和第二开口76。第一开口74和第二开口76是细长的,使得开口的第一尺寸大于第二正交尺寸。第二开口76具有比第一开口74更长的开槽尺寸。第一开口和第二开口74、76通常位于主体72的相对侧上,并且被定位成使得它们位于相同的平面中,使得通过杆68的流体流动从第二附接部分75A、75B向下延伸到通常在单个平面内的第一附接部分73(图13)。通道88在杆68的主体72内延伸,并与具有第二开口76的第一开口74连通。通道88从第一开口74向第二开口76加宽。通道88具有给出大致倒V形构型的通道的弯曲内壁92。
法兰78从杆68的主体72径向延伸,并且部分地围绕主体的周向部分延伸。空腔80形成在主体72中,其允许泵1的轴93接合杆68的主体,用于在开口70中旋转主体。法兰78被配置成接合泵1的凹槽6中的钩108。法兰78和钩108之间的接合防止在泵1的操作期间移除进给装置7。这种安全特征防止在不受控制的流体量被输送到患者的情况下进给装置7中的自由流动条件,该自由流动条件会潜在地对患者有害。附加地,法兰78发挥用于限制杆68的旋转的止动接合特征的功能,如下面进一步解释的。配件65和杆68一起可以被视为装配组件82。装配组件82的配置从进口管件77移除流体流动选择阀,并且将其放置在盒子5的主体内。
在图8所示的配置中,装配组件82处于流体流动受阻配置中,其中,主体72阻止第二附接部分75A、75B的出口与开口70和第一附件部分73的入口连通。杆68的旋转,诸如通过与空腔80接合并且在开口70中顺时针旋转主体72的泵1的轴93,将会把第一开口74放置成与第二附接部分75B的出口连通,并且将会把第二开口76放置成与第一附接部分73的入口连通,由此将连接到第二附接部分75B的流体源放置成经由管45与出口71和出口管件83流体连通。第二附接部分75A仍然被阻止与第一附接部分73连通。杆68的进一步旋转将会把第一开口74放置成与第二附接部分75A的出口连通,并且第二开口76将保持与第一附接部分73的入口连通,由此将连接到第二附接部分75A的流体源放置成经由管45与出口71和出口管件83连通。这被完成是因为第二开口76的位置和长度使得第二开口的至少一些部分在杆68的整个移动中将与第一附接部分73的入口连通,以将第一开口74与第二附接部分75A、75B连通。第二附接部分75B现在被阻止与第一附接部分73连通。杆保持器66上的止动件94与法兰78接合,以限制主体在开口70中的旋转。
磁体126(广义地,识别构件)可以选择性地设置在配件的出口端口71中形成的凹穴128中。在图示的实施例中,仅示出了单个磁体126。然而,可以包括多达四(4)个磁体126,其中每个磁体容纳在配件65中的相应一个凹穴128中。当盒子5附接到泵时,泵1中的一个或多个传感器130定位成靠近凹穴128,以检测凹穴128中磁体126的存在。在一个实施例中,四(4)个传感器130(图中仅图示了一个)与盒子5中的四(4)个凹穴128相对地设置在泵中,使得当盒子附接到泵1时,传感器专用于每个凹穴并且通常位于每个凹穴的中心。磁体126的数量和布置可以预先确定,以指示进给装置7的功能配置。例如,磁体126的数量和布置可以将进给装置7的功能配置指示为进给、进给/冲洗、进给wifi、进给/冲洗wifi、新生儿进给、新生儿进给/冲洗、新生儿进给wifi、新生儿进给/冲洗wifi等中的一种。传感器130以及与传感器通信的处理器(未示出)被编程为将磁体布置识别为对应于进给装置7的特定功能配置。在一个实施例中,传感器130是霍尔效应传感器。在图示的实施例中,磁体126和凹穴128是圆盘形的。然而,在不脱离本公开的范围的情况下,磁体126和凹穴128可以具有其他形状。另外,在不脱离本公开的范围的情况下,磁体126可以在其他位置处以及通过其他方式安装到盒子5。
在一个实施例中,磁体126是轴向磁化的磁体(图14A)。因此,对于圆盘形磁体,北极和南极形成在圆盘的相对圆形面上,使得磁化方向沿着圆盘的旋转轴线。在该实施例中,磁体126可以放置在凹穴128中,其中北极抑或南极背离凹穴。除了凹穴128中仅磁体126的存在之外,磁体的取向(例如,面向北极和南极的方向)可以提供对进给装置7的特定功能配置的明显指示。因此,在盒子5上的在同一位置处(例如,在同一个凹穴28内)的磁体126可以向传感器提供两个不同的指示,这取决于磁体在该位置处的取向。因此,使用一(1)个磁体126的系统,更改磁体容纳在哪个凹穴128中以及磁体容纳在凹穴中的取向,允许系统指示多达八(8)个不同的磁体位置配置。在使用两(2)个磁体126的系统中,更改每个磁体容纳在哪个凹穴128中以及磁体容纳在凹穴中的取向允许系统指示多达三十二(32)个不同的磁体位置配置。这样,仅使用两个磁体126,就可以指示和识别三十二(32)个进给装置功能配置。使用三(3)个磁体126的系统可以指示多达六十四(64)种不同的磁体位置配置。这提供了在仅检测磁体存在与否的系统上识别更多数量的功能配置。
附加地或替代地,一个或多个磁体126可以在直径方向上被磁化(图14B)。在直径方向上被磁化的磁体是圆柱形或圆盘形的实施例中,磁体沿在其直径上被磁化,使得磁化方向沿着圆盘/圆柱的直径。因此,磁体的北极和南极形成在磁体的相对侧上。这与轴向磁化磁体形成对比,在轴向磁化磁体中,对于圆盘形磁体,北极和南极形成在圆盘的相对圆形面上,使得磁化方向沿着圆盘的轴线。当使用在直径方向上被磁化的磁体时,泵1中的传感器130可以是角度磁体传感器以检测磁体126在凹穴128中的取向(即,角位置)。角度传感器被配置成检测磁体的磁场,并基于检测到的磁场确定磁体的位置。例如,传感器测量磁场的XY坐标,并基于测量的坐标确定磁体的角位置。磁体126可以在盒子5上同一位置处在凹穴128中以不同角位置定位,以指示进给装置的超过两个的不同的功能配置。例如,磁体126的特定角度或角度范围可以对应于进给装置7的特定功能配置。在一个实施例中,每旋转10度可以对应于不同的功能配置,从而允许识别进给装置7的三十六(36)种不同的功能配置。角度旋转的其他增量也被设想用于提供不同数量的功能配置识别。因此,可能仅需要单个磁体来提供足够数量的位置变化,以指示进给装置7的不同功能配置。在该实施例中,图示实施例中所示的四个凹穴128可以用单个凹穴代替,以容纳单个在直径方向上被磁化的磁体。合适的传感器组件是由基于比利时伊普尔的梅莱克斯公司生产的三轴位置(Triaxis ®Position)传感器组件。
在一个实施例中,在直径方向上被磁化的磁体126被键控以识别磁体磁场的方向。这允许系统索引哪个角位置/磁场对应于进给装置7的哪个功能配置。
在一个实施例中,磁体126在未磁化条件下形成,并且然后被磁化。在一个实施例中,磁体126根据需要被重新磁化。
参照图5至图7,配件65的出口71的第二附接部分81从盒子5的顶部57凹入,使得出口管件83在被插入到第二附接部分81中之前向下延伸到盒子的主体51中。这提供了出口管件83的在从顶壁63向下延伸的弯曲引导壁96附近延伸的一段。弯曲引导壁96提供逐渐弧形的表面以供出口管件83在其上搁置,从而防止管件在盒子5的横向边缘上急剧弯曲。结果,出口管件83被防止扭结,这可以抑制通过管件的流体流动。附加地,因为出口管件83的一段在盒子5的顶部与管件的附件之间延伸到配件65,所以管件插入第二附接部分81中的段不位于管件受弯曲力的位置,该第二附接部分81可能已经通过溶剂处理而被软化。确切地说,该段与盒子5的顶部57间隔开,并且通常由弯曲引导壁96保持笔直。这进一步减少了出口管件83中的任何扭结或夹断的机会。
如示例性地所示的,凸舌84(图8和图9)可以从底座67的横向侧延伸,并且可以配置成容纳在盒子5的前部53中的相应开口86(例如图1和图4)中,以将配件65可释放地附接到盒子。侧壁61中的一对引导斜坡91(图6和图7)可以朝向开口86形成漏斗。配件65上的凸舌84可以沿斜坡91行进,并且被容纳在开口86中,以将配件保持到盒子主体51。配件65的杆保持器66被容纳在阀保持器98(图7)中,该阀保持器98形成在盒子5的主体51中。替代地,配件65可以与盒子主体51一体形成或被省略。
参照图5和图7,切口85A、85B可以形成在盒子主体51的顶壁63中,以分别容纳配件65的入口端口69的第二附接部分75A、75B和出口管件83。定位器壁87可以在盒子主体51的顶部附近竖直地延伸。T形壁89可以设置在大致位于盒子主体51的中心的侧壁61之间。配件65的底座67接合定位器壁87并且T形壁89的中心延伸部被容纳在底座67中的凹槽90(图9)中。该中心延伸部和凹槽90之间的接合防止或至少抑制配件65在盒子5中的任何横向移动。T形壁89的水平部分限制配件65在盒子5中向下移动。
弧形壁95通常可以设置在盒子主体51的中间处,以至少部分地限定转子凹槽97,用于在盒子5附接到外壳3时容纳泵1的转子37的至少一部分。转子凹槽97可以包括盒子主体51的前部53上的凸出99(图4)。入口和出口外部弯曲引导壁101可以与弧形壁95的相对侧大致平行延伸。入口和出口内部弯曲引导壁103可以分别与入口和出口外部弯曲引导壁101大致平行地从弧形壁95向上延伸,从而形成用于容纳和支撑管45的相应入口和出口部分的入口和出口开口。引导壁101、103和弧形壁95可以形成管通道,以用于以环状配置容纳管45的下部部分,从而在盒子5附接到外壳3时相对于转子37适当地定位管。弧形壁95和弯曲引导壁101、103可以围绕转子凹槽97的侧部以紧密配合的关系容纳管。凸舌100可以延伸到管通道上,以将管45保持在管通道中,并且将管45保持在盒子中,从而根据第三轴线来约束管。外部弯曲引导壁101可以大致终止于转子凹槽97的底侧,使得管45不与转子凹槽97底部处的引导壁101、103或弧形壁95直接相对。
插入件105可以被容纳在外壳3中的盒子凹槽6中,以帮助将盒子5和管45固定在盒子凹槽6中(图3)。插入件105可以被定位在凹槽6中,使得在盒子5附接到外壳3时、插入件105被容纳在弯曲引导壁101、103上方的盒子5的后部空腔中。插入件105可以包括设置在插入件的入口侧处用于容纳管45的入口部分的一对相对的第一凸起107和设置在插入件的出口侧处用于容纳管的出口部分的一对相对的第二凸起109。盒子主体51的后部55上的肋111(图6和图7)可以被定位成与第二凸起109之间的管45的出口部分接合,以帮助将入口和出口部分插入到凸起中。标记112可以设置在第二凸起109中的至少一个上,从而指示管45中的流体流动方向。在所示的实施例中,标记112呈箭头的形式。
参照图5至图7,定子构件113可以设置为空腔(诸如通常在转子凹槽97的底部处或接近转子凹槽97的底部的定子开口115)中的盒子主体51的底部部分。因此,当盒子5附接到外壳3时,定子构件113通常定位成与转子37的底部相对。在有利的配置中,当辊43与管接合时,定子构件113可以支撑进给装置7的管45,如下面解释的。在一些情况下,定子构件113可以具有沿定子构件的长度延伸的弧形形状。如在示例性图示的实施例中,定子构件113可以是悬臂式构件,该悬臂式构件只在第一端处锚定到盒子主体51并且在相对于盒子主体51的定子开口115中至少部分地自由浮动。如图所示,柔性定子构件113可以围绕其连接枢转或锚定到盒子5的其余部分,并且可以展平。例如,定子构件可以具有粘附到盒子主体的第一端和未被固定的第二端,该第二端可以浮动或位移,以允许具有定子构件的表面的反应段具有偏转位移。例如,当所述至少一个辊在围绕转子的旋转轴线旋转的同时沿着管横向移动时,柔性定子构件113可以在其围绕旋转轴线旋转期间对由一个或多个辊43施加的力作出反应而位移或偏转到偏转位移。
第一段的底部上的横向肋116可以为柔性定子构件113提供结构刚度,并且可以用作接触表面,该接触表面便于从模腔中移除悬臂式定子构件,诸如通过顶出。在所示的实施例中,柔性定子构件113可以与盒子主体51一体形成为一个零件。然而,柔性定子构件113可以与盒子主体51分开形成,并且通过合适的方式附接到盒子主体。例如,柔性定子(未示出)可以具有细长延伸部分,该延伸部分与盒子主体中的接合空腔接合,其中,接合空腔的大小和形状被相应地设计成容纳延伸部分。以这种方式,定子构件可以选自从具有不同机械特性(诸如模量和曲率半径)的多个候选,以在考虑或不考虑任何管特性的情况下定制盒子操作参数,并且在泵送操作期间提供特定的流动性能属性。
止动件117可以设置在定子开口115的底部处,以限制柔性定子构件113浮动移动到最大位移。止动件117可以相对于柔性定子构件113的下侧间隔开,以防止定子构件的挠曲,这种挠曲将会导致定子构件的塑性变形。例如,止动件构件可以被定位成限制不固定端到最大位移的偏转位移距离的大小。在所示的实施例中,止动件117形成为盒子主体51的一部分。然而,止动件117可以与盒子主体51分开形成并且以合适的方式附接到盒子主体。在其他情况下,止动件117可以在外壳3上形成并且配置成限制柔性定子构件113到最大位移的位移。止动件117可以具有比柔性定子构件113的宽度更大的宽度,使得止动件提供足够的表面积,以限制定子构件的移动。止动件117可以用于屏蔽柔性定子构件113,并且大小通常设计成防止或降低钩住或抓住构件113的可能性。
在将盒子5附接到泵外壳3之前,入口管和出口管件77、83可以分别附接到盒子的入口和出口端口69、71。为了将盒子5附接到泵外壳3,盒子主体51的底部59处的一个或多个销或突出凸起119可以插入外壳3中的凹槽6的底部处的狭槽124中。突出凸起119与狭槽124之间的接合大致将盒子5定位在外壳3上。盒子主体51然后可以向上旋转,直到盒子主体的顶部57处的凸舌125上的横档123由凹槽6的顶部处的扣件127捕获。在所示的实施例中,突出凸起119和横档123与盒子主体51一体形成。然而,突出凸起119和横档123可以与盒子主体51分开形成并且以合适的方式附接到盒子主体。在将盒子5附接到泵外壳3之后,配件65中的凹穴128将通常与泵1中的一个或多个传感器130相对设置。在该位置中,所述一个或多个传感器130可以检测容纳在凹穴128中的任何磁体126、以及凹穴中磁体的取向,以确定进给装置7的功能配置。知道了进给装置7的功能配置,就可以指示泵1执行什么泵送例程。为了从泵外壳3拆下盒子5,可以按压凸舌125,以使横档123从扣件127脱离。
一旦盒子5附接到泵外壳3,进给装置7的管45便被定位成被泵1的辊43接合。辊43与管45在管的被柔性定子构件113支撑的部分处接合。管45由辊43的接合使柔性定子构件113挠曲或远离辊移动。特别地,该移动允许管45至少部分地拉直成更线性的配置,从而允许辊43以半线性的方式阻塞管。因此,代替如可以是在常规泵中用辊的情况一样拉动和拉伸管45,辊43沿着管滑动并且在张力减小的状态下阻塞管。结果,辊43产生与管45的实际线性尺寸一致的等分部分。因此,泵1的所计算的等分部分体积与由泵产生的实际等分部分体积更紧密地匹配,从而导致更准确的进给。
当介绍本发明或其(多个)优选实施例的元素时,冠词“一”、“一个”、“该”和“所述”旨在意指存在一个或多个元素。术语“包括”、“包含”和“具有”旨在是包括性的,并且意指可能存在除所列元素之外的其他元素。
鉴于上述情况,将看出,实现了本发明的几个目的,并且取得了其他有利的结果。
由于可以在不脱离本发明的范围的情况下对上述构造进行各种改变,意图是,上述描述中所包含的和附图中所示的所有内容应被解释为说明性的,且不是以限制性的意义进行解释。
- 用于流量控制设备的盒子
- 流体流量控制设备和用于流体流量控制设备的控制元件