车辆转向系统的双前桥总成及车辆转向系统
文献发布时间:2023-06-19 13:49:36
技术领域
本申请涉及车辆前桥技术领域,特别涉及一种车辆转向系统的双前桥总成及车辆转向系统。
背景技术
在相关技术方案CN203511762U中,汽车双前桥转向机构包括转向器、转向器支架、转向摇臂、直拉杆、Ⅰ桥侧拉杆、Ⅱ桥侧拉杆、支座、Ⅰ桥过渡臂、桥过渡臂、过渡拉杆。转向器支架固定在车架上,转向器安装在转向器支架上,转向器的输入轴通过花键与方向盘相连,输出轴通过花键与转向摇臂连接,可以传递扭矩。
Ⅰ桥、Ⅱ桥上节臂之间的连接采用中间垂臂过渡的形式,即垂臂支架固定在车架上,Ⅰ桥、Ⅱ桥的上节臂分别与垂臂上不同的孔位连接,实现Ⅰ桥、Ⅱ桥转角关系协调,这种连接方式的缺点是当悬架带动车架振动时,固定在车架上的垂臂随之发生振动,由于Ⅰ桥侧拉杆、Ⅱ桥侧拉杆是刚性拉杆,其长度不可变化,此时会使得Ⅰ桥侧拉杆、Ⅱ桥侧拉杆连接的转向节发生小幅度的偏转,这种额外的偏转会严重影响Ⅰ桥、Ⅱ桥之间转角关系的协调性,容易造成轮胎的过度磨损。
发明内容
本申请实施例提供一种车辆转向系统的双前桥总成及车辆转向系统,以解决相关技术中因悬架振动影响Ⅰ桥、Ⅱ桥之间转角关系的协调性,容易造成轮胎的过度磨损的问题。
第一方面,提供了一种车辆转向系统的双前桥总成,其包括:
一桥,所述一桥上设有用于安装第一转向组件的第一安装结构,所述一桥上还设有第一上节臂;
二桥,所述二桥上设有用于安装第二转向组件的第二安装结构,所述二桥上还设有第二上节臂;
第一直拉杆,所述第一直拉杆的两端分别连接在所述第一上节臂和第二上节臂上;以及,
所述第一上节臂与所述第二上节臂的朝向相同,且所述第一上节臂的长度小于所述第二上节臂的长度。
一些实施例中,所述第一转向组件包括电液转向机、液压助力缸和第二直拉杆;所述第一安装结构包括组设于所述一桥上的第一安装座和第二安装座,以及转动连接在所述一桥上的左转向轮下节臂和右转向轮下节臂,所述第一安装座用于安装所述电液转向机,所述第二安装座和右转向轮下节臂分别用于连接所述液压助力缸的两端,所述左转向轮下节臂用于通过第二直拉杆连接所述电液转向机的转向垂臂;
所述第二转向组件包括两个液压助力缸;所述第二安装结构包括组设于所述二桥上的第二安装座,以及转动连接在所述二桥上的左转向轮下节臂和右转向轮下节臂,所述第二安装座用于连接两个所述液压助力缸的一端,所述左转向轮下节臂和右转向轮下节臂分别用于连接两个所述液压助力缸的另一端。
一些实施例中,所述第一安装座被配置为:当电液转向机安装固定在所述第一安装座上时,所述电液转向机的轴向与车辆高度方向所夹持的角度为第一锐角α。
一些实施例中,所述第一锐角α的取值范围为10°~20°。
一些实施例中,所述第一转向组件包括两个电动缸;所述第一安装结构包括组设于所述一桥上的第二安装座,以及转动连接在所述一桥上的左转向轮下节臂和右转向轮下节臂,所述第二安装座用于连接两个所述电动缸的一端,所述左转向轮下节臂和右转向轮下节臂分别用于连接两个所述电动缸的另一端;
所述第二转向组件包括两个电动缸;所述第二安装结构包括组设于所述二桥上的第二安装座,以及转动连接在所述二桥上的左转向轮下节臂和右转向轮下节臂,所述第二安装座用于连接两个所述电动缸的一端,所述左转向轮下节臂和右转向轮下节臂分别用于连接两个所述电动缸的另一端。
一些实施例中,所述第一转向组件包括两个液压助力缸;所述第一安装结构包括组设于所述一桥上的第二安装座,以及转动连接在所述一桥上的左转向轮下节臂和右转向轮下节臂,所述第二安装座用于连接两个所述液压助力缸的一端,所述左转向轮下节臂和右转向轮下节臂分别用于连接两个所述液压助力缸的另一端;
所述第二转向组件包括两个液压助力缸;所述第二安装结构包括组设于所述二桥上的第二安装座,以及转动连接在所述二桥上的左转向轮下节臂和右转向轮下节臂,所述第二安装座用于连接两个所述液压助力缸的一端,所述左转向轮下节臂和右转向轮下节臂分别用于连接两个所述液压助力缸的另一端;以及,
在所述第一转向组件所包含的液压助力缸和所述第二转向组件所包含的液压助力缸中,至少有一个液压助力缸上设有用于检测对应的液压助力缸位置的位置传感器。
一些实施例中,双前桥包括两个前桥,且其中一个前桥为所述一桥,另一个前桥为所述二桥;
所述右转向轮下节臂通过第一主销连接在对应的前桥上,所述右转向轮下节臂上设有第一安装孔;
所述第一主销在对应的前桥轴向上的垂足为A点,所述第一安装孔的圆心与A点所形成的直线,朝远离该前桥上的第二安装座的方向偏,且该直线与车辆长度方向所夹持的角度为第二锐角β。
一些实施例中,所述第二锐角β的取值范围为1°~5°。
一些实施例中,双前桥包括两个前桥,且其中一个前桥为所述一桥,另一个前桥为所述二桥;
所述左转向轮下节臂通过第二主销连接在对应的前桥上,所述左转向轮下节臂上设有第二安装孔;
所述第二主销在对应的前桥轴向上的垂足为B点,所述第二安装孔的圆心与B点所形成的直线,朝远离该前桥上的第二安装座的方向偏,且该直线与车辆长度方向所夹持的角度为第三锐角。
第二方面,提供了一种车辆转向系统,其包括:
如上任一所述的车辆转向系统的双前桥总成;以及,
第一转向组件,所述第一转向组件安装固定在第一安装结构上;
第二转向组件,所述第二转向组件一端安装在第二安装结构上。
本申请提供的技术方案带来的有益效果包括:
在本申请中,一方面,将转向组件固定在桥壳上,制动时悬架的变形不会影响转向组件与车桥的相对位置,从而避免了制动跑偏的问题。另一方面,一桥、二桥上节臂采用不等长的设计,同时利用一根直拉杆连接,不采用中间垂臂过渡的连接形式,不受车架振动的影响,能够稳定的协调一桥和二桥之间转角关系,避免造成轮胎的过度磨损的问题。
附图说明
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
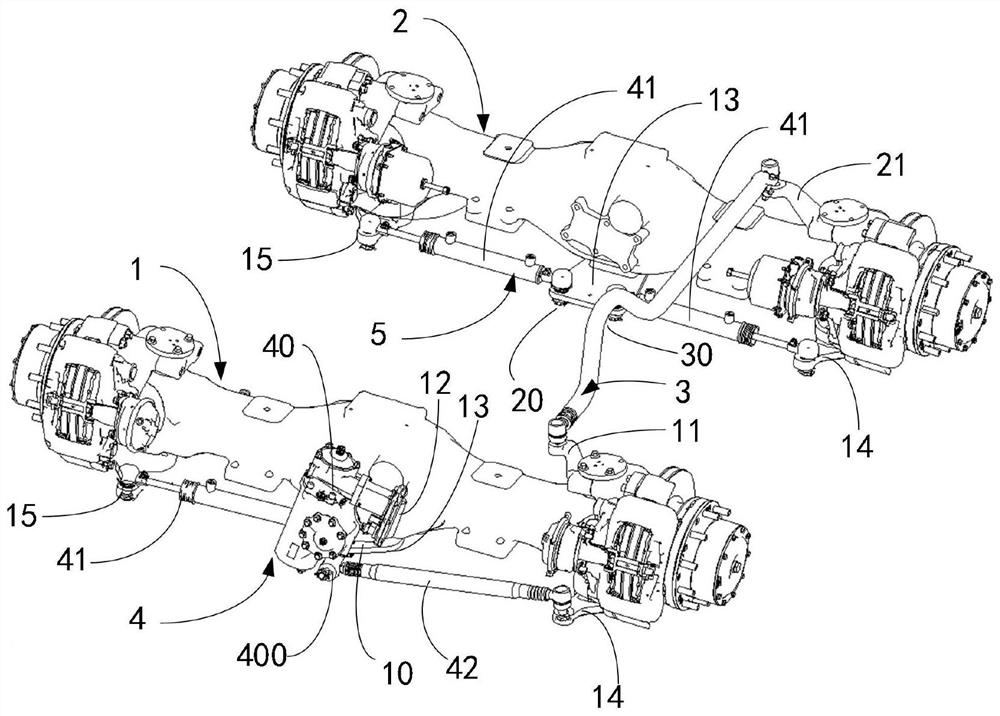
图1为本申请实施例提供的车辆转向系统示意图(电液转向器+液压助力缸);
图2为本申请实施例提供的仿真计算得到二桥左轮理论转角与实际转角曲线图(上节臂等长);
图3为本申请实施例提供的仿真计算得到二桥右轮理论转角与实际转角曲线图(上节臂等长);
图4为本申请实施例提供的仿真计算得到二桥左轮理论转角与实际转角曲线图(上节臂不等长);
图5为本申请实施例提供的仿真计算得到二桥右轮理论转角与实际转角曲线图(上节臂不等长);
图6为本申请实施例提供的一桥示意图;
图7为本申请实施例提供的一桥上装配有电液转向机示意图;
图8为本申请实施例提供的电液转向机的轴向与车辆高度方向同向时得到的转向垂臂夹角曲线图;
图9为本申请实施例提供的电液转向机的轴向与车辆高度方向夹持第一锐角α=14°时得到的转向垂臂夹角曲线图;
图10为本申请实施例提供的车辆转向系统示意图(电动缸);
图11为本申请实施例提供的车辆转向系统示意图(液压助力缸);
图12为本申请实施例提供的一桥上装配有电液转向机时的仰视图;
图13为本申请实施例提供的第一主销与垂足A的关系图。
图中:1、一桥;10、第一安装结构;11、第一上节臂;12、第一安装座;13、第二安装座;130、第三安装孔;131、第三球头销;14、左转向轮下节臂;140、第二安装孔;141、第二球头销;15、右转向轮下节臂;150、第一主销;151、第一安装孔;152、第一球头销;2、二桥;20、第二安装结构;21、第二上节臂;3、第一直拉杆;30、避让空间;4、第一转向组件;40、电液转向机;400、转向垂臂;41、液压助力缸;42、第二直拉杆;43、电动缸;5、第二转向组件。
具体实施方式
为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请的一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本申请保护的范围。
参见图1所示,本申请实施例提供了一种车辆转向系统的双前桥总成,双前桥包括两个前桥,且其中一个前桥为一桥1,另一个前桥为二桥2;双前桥总成包括一桥1、二桥2和第一直拉杆3,一桥1上设有用于安装第一转向组件4的第一安装结构10,第一安装结构10位于一桥1中间的桥壳上,一桥1上还设有第一上节臂11;二桥2上设有用于安装第二转向组件5的第二安装结构20,第二安装结构20位于二桥2中间的桥壳上,二桥2上还设有第二上节臂21;第一直拉杆3的两端分别连接在第一上节臂11和第二上节臂21上,具体地,第一直拉杆3的两端通过球头销的方式与第一上节臂11和第二上节臂21相连接;第一上节臂11与第二上节臂21的朝向相同,参见图1,第一上节臂11与第二上节臂21都是在对应的前桥左侧,并沿对应前桥轴向朝向右侧,且第一上节臂11的长度小于第二上节臂21的长度。
当一桥和二桥上节臂采用等长结构设计时,参见图2和图3所示,图2为仿真计算得到二桥左轮理论转角与实际转角曲线图,图3为仿真计算得到二桥右轮理论转角与实际转角曲线图。
可以看到,等长设计时,二桥左轮的理论转角和实际转角的误差约为40.01°-27.89°≈13°,二桥右轮的理论转角和实际转角的误差约为50.23°-25.24°≈25°,无法满足转向系统的转角协调要求。
当一桥和二桥上节臂采用不等长结构设计时,参见图4和图5所示,图4为仿真计算得到二桥左轮理论转角与实际转角曲线图,图5为仿真计算得到二桥右轮理论转角与实际转角曲线图。
可以看到,不等长设计时,二桥左轮的理论转角和实际转角的误差约为27.89°-24.5°≈3.4°,二桥右轮的理论转角和实际转角的误差约为24.34°-20.72°≈3.6°,转角误差得到明显的改善,可以满足转向系统的转角协调要求。
因此,在本申请实施例中,一方面,将转向组件固定在桥壳上,制动时悬架的变形不会影响转向组件与车桥的相对位置,从而避免了制动跑偏的问题。另一方面,一桥、二桥上节臂采用不等长的设计,同时利用一根直拉杆连接,不采用中间垂臂过渡的连接形式,不受车架振动的影响,能够稳定的协调一桥和二桥之间转角关系,避免造成轮胎的过度磨损。
参见图1所示,在一些优选的实施方式中,第一直拉杆3向上弯曲以形成一避让空间30,使得第一直拉杆3类似“几”字型,其目的是为了在一桥的左轮左转至左极限位置时,第一直拉杆3不与轮胎发生干涉,从而可以避免将第一直拉杆3从中间断开,一分为二,进一步地避免悬架跳动造成车轮额外偏转的问题。
在本申请中,转向组件安装在前桥的桥壳上,通过转向组件的驱动,实现转向功能。
为了实现转向,可以使用多种转向组件。
比如,在一个优选的实施方式中,采用电液转向机+液压助力缸,参见图1、图6和图7,第一转向组件4包括电液转向机40、液压助力缸41和第二直拉杆42;第一安装结构10包括组设于一桥1上的第一安装座12和第二安装座13,以及转动连接在一桥1上的左转向轮下节臂14和右转向轮下节臂15,第一安装座12和第二安装座13设置在一桥1中部的桥壳上,第一安装座12用于安装电液转向机40,第二安装座13和右转向轮下节臂15分别用于连接液压助力缸41的两端,具体地,第二安装座13上设有第三安装孔130,第三安装孔130用来安装第三球头销131,第三球头销131连接液压助力缸41的一端,左转向轮下节臂14用于通过第二直拉杆42连接电液转向机40的转向垂臂400。
第二转向组件5与第一转向组件4相比,缺少电液转向机40和第二直拉杆42,具体地,第二转向组件5包括两个液压助力缸41;第二安装结构20与第一安装结构10相比,缺少第一安装座12,具体地,第二安装结构20包括组设于二桥2上的第二安装座13,以及转动连接在二桥2上的左转向轮下节臂14和右转向轮下节臂15,第二安装座13用于连接两个液压助力缸41的一端,具体地,第二安装座13上设有两个第三安装孔130,第三安装孔130用来安装第三球头销131,第三球头销131连接液压助力缸41的一端,左转向轮下节臂14和右转向轮下节臂15分别用于连接两个液压助力缸41的另一端。
当需要转向时,电液转向机40接收控制器的控制信号,使转向器输出轴带动转向垂臂400摆动,转向垂臂400通过第二直拉杆42带动一桥1的左转向节绕其对应的主销旋转,同时,电液转向机40控制液压助力缸41油路的通断,使液压助力缸41推动右转向节绕其对应的主销旋转,从而在电液转向机40和液压助力缸41的共同液压助力作用下,实现车辆转向。同时,液压助力缸41还控制二桥2的两个液压助力缸41油路的通断,以驱使相应转向节的旋转。
参见图6和图7所示,第一安装座12被配置为:当电液转向机40安装固定在第一安装座12上时,电液转向机40的轴向与车辆高度方向所夹持的角度为第一锐角α,而非电液转向机40的轴向与车辆高度方向同向,这么做的好处是:使转向垂臂400在左转极限和右转极限时夹角相等,保证电液转向机40左转和右转的圈数基本相等,这样符合驾驶员的一般操纵习惯,提高了人机工程水平,便于无人驾驶系统的控制。
其中,由于电液转向机40的传动比不同,因此,第一锐角α较优的取值范围为10°~20°,更加优选地,第一锐角α的取值为14°。
当第一锐角α=14°时,参见图8和图9所示,图8是电液转向机40的轴向与车辆高度方向同向时得到的转向垂臂400夹角曲线图,图8中转向垂臂400在左转极限时的夹角为41.31°,转向垂臂400在右转极限时的夹角为35.24°,二者相差6.07°,电液转向机40传动比为23,6.07°×23/360°=0.4圈,也就是说,此时因为左转极限时的夹角与右转极限时的夹角相差6.07°,导致向左旋转和向右旋转相差0.4圈。
图9是电液转向机40的轴向与车辆高度方向夹持第一锐角α=14°时得到的转向垂臂400夹角曲线图,图9中转向垂臂400在左转极限时的夹角为36.24°,转向垂臂400在右转极限时的夹角为36.49°,二者基本相等,此时向左旋转和向右旋转的圈数基本一致,从而使得电液转向机40在相同的转动速度下,转至左极限和右极限的时间大致相同,符合驾驶员的一般操纵习惯,提高了人机工程水平,便于无人驾驶系统的控制。
再比如,参见图10所示,在另一个优选的实施方式中,转向组件采用电动缸形式,此时,第一转向组件4和第二转向组件5基本相同,第一安装结构10和第二安装结构20也基本上相同。
具体地,第一转向组件4包括两个电动缸43;第一安装结构10包括组设于一桥1上的第二安装座13,以及转动连接在一桥1上的左转向轮下节臂14和右转向轮下节臂15,第二安装座13用于连接两个电动缸43的一端,左转向轮下节臂14和右转向轮下节臂15分别用于连接两个电动缸43的另一端。
第二转向组件5包括两个电动缸43;第二安装结构20包括组设于二桥2上的第二安装座13,以及转动连接在二桥2上的左转向轮下节臂14和右转向轮下节臂15,第二安装座13用于连接两个电动缸43的一端,左转向轮下节臂14和右转向轮下节臂15分别用于连接两个电动缸43的另一端。
当需要转向时,电动缸43接收控制器的控制信号,使电动缸43的伸缩轴进行伸缩,从而实现转向。
需要说明的是,电动缸43的两端,都是通过球头销的方式连接。
还比如,参见图11所示,在另一个优选的实施方式中,转向组件采用液压助力缸形式,此时,第一转向组件4和第二转向组件5基本相同,第一安装结构10和第二安装结构20也基本上相同。
具体地,第一转向组件4包括两个液压助力缸41;第一安装结构10包括组设于一桥1上的第二安装座13,以及转动连接在一桥1上的左转向轮下节臂14和右转向轮下节臂15,第二安装座13用于连接两个液压助力缸41的一端,左转向轮下节臂14和右转向轮下节臂15分别用于连接两个液压助力缸41的另一端。
第二转向组件5包括两个液压助力缸41;第二安装结构20包括组设于二桥2上的第二安装座13,以及转动连接在二桥2上的左转向轮下节臂14和右转向轮下节臂15,第二安装座13用于连接两个液压助力缸41的一端,左转向轮下节臂14和右转向轮下节臂15分别用于连接两个液压助力缸41的另一端。
在第一转向组件4所包含的液压助力缸41和第二转向组件5所包含的液压助力缸41中,至少有一个液压助力缸41上设有用于检测对应的液压助力缸41位置的位置传感器。
当需要转向时,液压助力缸41接收控制器的控制信号,使电动缸43的伸缩轴进行伸缩,从而实现转向。位置传感器检测液压助力缸41位置,并反馈给控制器,控制器根据该位置数据判断是否已经转向到位。
需要说明的是,液压助力缸41的两端,都是通过球头销的方式连接。
在本申请中,在前桥(包括一桥1和二桥2)的下方左、右两侧各增加一根下节臂,即左转向轮下节臂14和右转向轮下节臂15,以实现转向功能。然而,由于同一车桥上的左轮转角和右轮转角在转向时要符合阿克曼函数关系,这便导致前桥的转向节朝左转动的极限角度与朝右转动的极限角度不相等。
为了解决这一问题,本申请对右转向轮下节臂15做了进一步的改进。
参见图12所示,右转向轮下节臂15通过第一主销150连接在对应的前桥上(图12中使用一桥1作为示例),右转向轮下节臂15上设有第一安装孔151,第一安装孔151用于安装第一球头销152,通过第一球头销152连接液压助力缸41或者电动缸43,图7和图12中连接的是液压助力缸41;参见图13所示,由于主销是倾斜布置的,而非竖直布置,故将第一主销150在对应的前桥轴向上的垂足记为A点,第一安装孔151的圆心与A点所形成的直线,朝远离该前桥上的第二安装座13的方向偏,且该直线与车辆长度方向所夹持的角度为第二锐角β,第二锐角β较优的取值范围为1°~5°,更加优选地,第二锐角β的取值为2°。
通过设置第二锐角β,可以解决上述问题,以使得转至左极限、右极限时,液压助力缸41或者电动缸43的伸长、压缩的行程大致相等。
以下通过第二锐角β的取值为2°的例子来进行阐述。
参见图12所示,转向节左转向,且到极限时,左转极限角度为γ,且γ=36°,转向节右转向,且到极限时,右转极限角度为θ,且θ=39°。
通过将第一安装孔151的圆心与A点所形成的直线,与车辆长度方向所夹持的角度β设计成2°的夹角,使得液压助力缸41的初始长度L为772mm,也即未做转向时液压助力缸41的长度为772mm,转向节左转向,且当到达极限时,液压助力缸41的长度压缩至最短L
再结合图9,电液转向机40带动转向垂臂400左摆36.24°,液压助力缸41压缩154mm;电液转向机40带动转向垂臂400右摆36.49°,液压助力缸41伸长153mm,电液转向机40与液压助力缸41作为转向桥的动力元件达到了较好的协调,电液转向机40与液压助力缸41可以同时作用到极限位置,有利于精准控制转向桥转向的速度,在无人驾驶车辆中,精准控制整车转向的速度可以大大提高自动驾驶的安全性能,降低车速较高时发生甩尾,翻车等风险。
基于上述相同的原理,本申请对左转向轮下节臂14做了进一步的改进。
参见图6和图7所示,左转向轮下节臂14通过第二主销连接在对应的前桥上,左转向轮下节臂14上设有第二安装孔140,第二安装孔140用于安装第二球头销141,通过第二球头销141连接第二直拉杆42、液压助力缸41或者电动缸43,图7中第二球头销141连接第二直拉杆42;第二主销在对应的前桥轴向上的垂足为B点(图中未示出),第二安装孔140的圆心与B点所形成的直线,朝远离该前桥上的第二安装座13的方向偏,且该直线与车辆长度方向所夹持的角度为第三锐角,第三锐角较优的的取值范围为1°~5°,更加优选地,第三锐角的取值为2°。
上述对下节臂的设计,是以一桥1的左转向轮下节臂14和右转向轮下节臂15为例进行阐述的,需要说明的是,上述设计原理,同样适用于二桥2上的左转向轮下节臂14和右转向轮下节臂15。
参见图1所示,本申请还提供了一种车辆转向系统,其包括上述任一实施例提供的车辆转向系统的前桥总成,以及第一转向组件4、第二转向组件5,第一转向组件4安装固定在第一安装结构10上,第二转向组件5一端安装在第二安装结构20上。
在本申请的描述中,需要说明的是,术语“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本申请中的具体含义。
需要说明的是,在本申请中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
以上所述仅是本申请的具体实施方式,使本领域技术人员能够理解或实现本申请。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本申请的精神或范围的情况下,在其它实施例中实现。因此,本申请将不会被限制于本文所示的这些实施例,而是要符合与本文所申请的原理和新颖特点相一致的最宽的范围。
- 车辆转向系统的双前桥总成及车辆转向系统
- 双前桥或多转向桥车辆双转向或多转向器并联转向系统