一种用于履带式穴施机的智能挖穴装置及其控制方法
文献发布时间:2023-06-19 19:20:08
技术领域
本发明涉及果蔬种植领域,具体涉及一种用于履带式穴施机的智能挖穴装置及其控制方法。
背景技术
随着人民生活水平的不断提升,对于水果的需求也在不断提升,我国水果种植面积和产量均已处于世界前列水平。果树的产量和果实的质量对果农的经济收入有着重大影响,而施肥作业不仅能够决定果树的生长发育情况,更是能直接影响果实的质量和产量。随着农业机械化的推广,越来越多的施肥机械用于果园施肥,但目前市面上的施肥机械的智能化程度较低,钻头在挖穴、挖到石头、树根等坚硬物体时,不能进行自主判断从而停止作业,也不能对钻头的旋转速度以及给进量进行调整,因此会造成钻头的损坏以及造成动力的损耗,需要人工对施肥机械进行精准的操作,这种操作的劳动强度大且对操作技术有一定需求,一定程度上限制了工作效率的提升。因此可以发明一种智能挖穴装置,利用传感器感知机器工作状况,通过单片机计算并对下一步操作进行判断以及执行,大大降低了使用者的操作强度,同时也大大降低了操作失误的概率,保护了机器的钻头以及动力,提高了挖穴施肥机械的工作效率。
发明内容
本发明的目的在于克服现有技术的不足,提供一种用于履带式穴施机的智能挖穴装置,所述智能挖穴装置可以实现果园挖穴施肥机械的智能工作,保护钻头,减少动力的损耗,降低使用者的操作强度,提高生产效率,降低劳动成本以及机械维护成本。
本发明的第二个目的在于提供一种用于履带式穴施机的智能挖穴装置的控制方法。
本发明解决上述技术问题的技术方案是:
一种用于履带式穴施机的智能挖穴装置,包括履带式底盘、设置在履带式底盘上的挖穴装置以及检测控制装置,其中,
所述挖穴装置包括安装架、设置在安装架上的两组智能挖穴模块以及用于驱动两组智能挖穴模块做横向运动的驱动模块,其中,所述安装架安装在所述履带式底盘上;所述智能挖穴模块包括机架、设置在机架上的挖穴机构、用于对挖穴机构所挖出的土壤进行收集的土壤收集机构以及用于驱动所述挖穴机构和所述土壤收集机构同步升降的升降机构,其中,所述挖穴机构包括设置在机架上的螺旋钻头以及用于驱动所述螺旋钻头转动的挖穴驱动机构;所述土壤收集机构包括设置在机架上的土壤收集筒,其中,所述螺旋钻头位于所述土壤收集筒内;
所述检测控制装置包括检测模块、通信模块以及控制模块,其中,所述检测模块包括用于检测所述螺旋钻头在挖穴时的扭矩的扭矩传感器和用于检测所述螺旋钻头在挖穴时所受到的压力的压力传感器;所述通信模块用于将所述检测模块所检测的扭矩信息和压力信息上传给所述控制模块,而所述控制模块用于接收上传的扭矩信息和压力信息并进行计算,以此改变机器的工作状态。
优选的,所述安装架与所述机架之间通过横向滑动机构连接,所述驱动模块用于驱动所述机架做横向运动,其中,所述横向滑动机构采用滑杆与滑块结合的方式,所述滑杆安装在所述安装架上,所述滑块安装在所述机架上;所述驱动模块采用两组液压缸分别驱动两组智能挖穴模块单独运动,或者采用双作用气缸驱动两组智能挖穴模块同步运动。
优选的,所述挖穴驱动机构包括设置在机架上的液压马达,所述液压马达的输出轴与所述螺旋钻头之间通过联轴器连接。
优选的,所述机架上设置有用于固定安装所述液压马达与所述土壤收集筒的安装座,其中,所述机架与所述安装座之间通过竖向滑动机构连接。
优选的,所述升降机构包括升降电机与丝杆传动机构,其中,所述升降电机安装在所述机架上,所述丝杆传动机构中的丝杆一端与所述升降电机的主轴连接,另一端竖直向下延伸,并安装在所述机架上;所述丝杆传动机构中的丝杆螺母安装在所述安装座上。
优选的,所述履带式底盘上安装有水平传感器,所述水平传感器用于实时检测设备的姿态变化,以此判断螺旋钻头是否无法下降而导致机器被顶起。
优选的,所述螺旋钻头包括转动轴、设置在转动轴末端的钻头以及沿着所述转动轴竖向延伸的螺旋叶片。
优选的,所述扭矩传感器和所述压力传感器安装在所述联轴器上。
一种用于履带式穴施机的智能挖穴装置的控制方法,包括以下步骤:
S1、履带式穴施机在进行作业,通过驱动模块带动两组智能挖穴装置横向运动,升降机构则带动挖穴机构以及土壤收集机构做升降运动,使得螺旋钻头与土壤接触,接着挖穴驱动机构带动螺旋钻头转动,从而进行挖穴,挖穴产生的土壤则通过土壤收集筒进行收集;
S2、在挖穴过程中,扭矩传感器和压力传感器分别检测螺旋钻头在挖穴过程中的扭矩和受力情况,通信模块将所述检测模块所检测的扭矩信息和压力信息上传给所述控制模块,而所述控制模块用于接收上传的扭矩信息和压力信息并进行计算和分析,判断此时螺旋钻头所挖土壤的硬度,以及是否碰到坚硬物体;
S3、当螺旋钻头碰到坚硬障碍物时,挖穴驱动机构继续提供动力,若螺旋钻头无法继续向下正常工作,且扭矩传感器和压力传感器读数持续增大,且大于上限值时,控制模块通过处理数据判断出此时不适合继续作业,控制模块控制继电器断开液压动力控制器,在螺旋钻头停止旋转后,控制螺旋钻头进行缓慢反向旋转,进而控制智能挖穴模块向上升起回到初始位置;
当所挖土壤土质为松软土质时,螺旋钻头受到的阻力较小,此时的扭矩传感器和压力传感器读数较小,且小于下限值后,控制模块通过处理数据判断出此时的作业阻力小,通过加大螺旋钻头的转速及下降速度,从而加快作业速度,提高工作效率;
S4、完成挖穴作业后,升降机构驱动所述挖穴机构和土壤收集机构复位。
优选的,在步骤S3中,所述履带式底盘上安装的水平传感器可以实时采集履带式穴施机的姿态变化信息,当履带式穴施机处于带坡度的地面进行作业时,螺旋钻头的下降阻力导致履带式穴施机的作业端翘起,使得水平传感器读数发生变化,控制模块通过分析数据判断履带式底盘此时是否处于具有侧翻的风险,并辅助判断螺旋钻头是否挖到坚硬物体,若判断为具有侧翻的风险或挖到坚硬物体,即控制继电器断开液压动力控制器并控制智能挖穴模块恢复至初始位置。
本发明与现有技术相比具有以下的有益效果:
采用本发明智能挖穴装置及其控制方法实现在挖穴过程中保护钻头、降低动力损耗、减小操作难度和提高工作效率。具体原因为:扭矩传感器和压力传感器可以实时采集螺旋钻头的受力情况,通过算法计算得出挖穴装置以及履带式穴施机的工作情况,对工作情况进行分析后,将控制策略转化为开关控制信号,输入到继电器模组中,通过控制继电器模组的开闭对挖穴装置的工况进行调整,挖穴装置在控制模块的控制下实现自动调整转速、扭矩、升降方向和速度等,从而达到保护螺旋钻头、降低动力损耗、减小操作难度和提高工作效率的目的。
附图说明
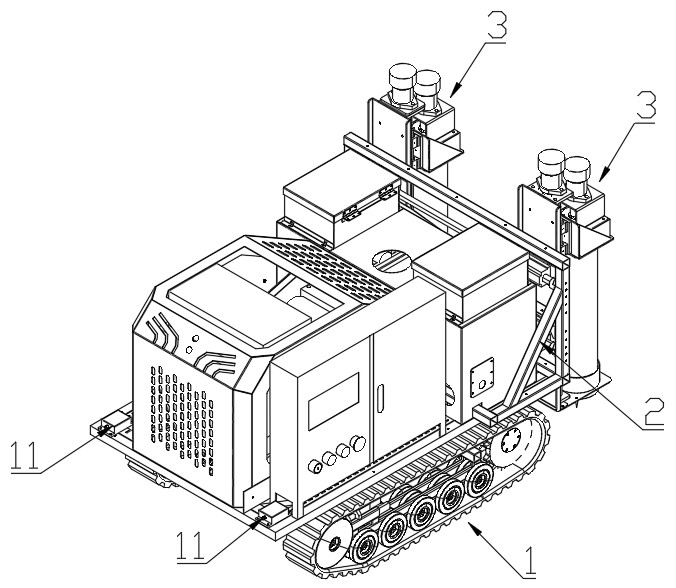
图1-图2为本发明的履带式穴施机的结构示意图,其中,图1为立体结构示意图,图2为主视图。
图3为智能挖穴装置的结构示意图。
图4为驱动模块的结构示意图。
图5为智能挖穴模块的结构示意图。
具体实施方式
下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
参见图1-图5,本发明的用于履带式穴施机的智能挖穴装置包括履带式底盘1、设置在履带式底盘1上的挖穴装置以及检测控制装置,其中,
所述挖穴装置包括安装架2、设置在安装架2上的两组智能挖穴模块3以及用于驱动两组智能挖穴模块3做横向运动的驱动模块12,其中,所述安装架2安装在所述履带式底盘1上;所述智能挖穴模块3包括机架8、设置在机架8上的挖穴机构、用于对挖穴机构所挖出的土壤进行收集的土壤收集机构以及用于驱动所述挖穴机构和所述土壤收集机构同步升降的升降机构7,其中,所述挖穴机构包括设置在机架8上的螺旋钻头9以及用于驱动所述螺旋钻头9转动的挖穴驱动机构,其中,所述挖穴驱动机构包括设置在机架8上的液压马达6,所述液压马达6的输出轴与所述螺旋钻头9之间通过联轴器连接;所述土壤收集机构包括设置在机架8上的土壤收集筒4,其中,所述螺旋钻头9位于所述土壤收集筒4内;
所述检测控制装置包括检测模块、通信模块以及控制模块,其中,所述检测模块包括用于检测所述螺旋钻头9在挖穴时的扭矩的扭矩传感器和用于检测所述螺旋钻头9在挖穴时所受到的压力的压力传感器,其中,所述扭矩传感器和所述压力传感器安装在所述联轴器上;所述通信模块用于将所述检测模块所检测的扭矩信息和压力信息上传给所述控制模块,而所述控制模块用于接收上传的扭矩信息和压力信息并进行计算,以此来改变履带式穴施机的工作状态;其中,所述控制模块可以实时处理检测模块回传的信息,通过算法计算得出挖穴装置以及履带式穴施机的工作情况,对工作情况进行分析后,将控制策略转化为开关控制信号,输入到继电器模组中,通过控制继电器模组的开闭对挖穴装置的工况进行调整,挖穴装置在控制模块的控制下实现自动调整转速、扭矩、升降方向和速度等,从而达到保护螺旋钻头9、降低动力损耗、减小操作难度和提高工作效率的目的。
参见图1-图5,所述安装架2与所述机架8之间通过横向滑动机构连接,所述驱动模块12用于驱动所述机架8做横向运动,其中,所述横向滑动机构采用滑杆与滑块结合的方式,其中,所述滑杆安装在所述安装架2上,所述滑块安装在所述机架8上;所述驱动模块12采用两组液压缸分别驱动两组智能挖穴模块3单独运动,或者采用双作用气缸驱动两组智能挖穴模块3同步运动。通过设置上述结构,可以实现两组智能挖穴模块3同时挖穴,从而提高两倍的工作效率。
参见图1-图5,所述机架8上设置有用于固定安装所述液压马达6与所述土壤收集筒4的安装座5,其中,所述机架8与所述安装座5之间通过竖向滑动机构连接;所述升降机构7包括升降电机10与丝杆传动机构,其中,所述升降电机10安装在所述机架8上,所述丝杆传动机构中的丝杆一端与所述升降电机10的主轴连接,另一端竖直向下延伸,并安装在所述机架8上;所述丝杆传动机构中的丝杆螺母安装在所述安装座5上。通过设置上述结构,在挖穴的过程中,所述升降电机10带动丝杆转动,从而带动丝杆螺母以及安装在丝杆螺母上的机架8竖向运动,从而带动挖穴机构以及土壤收集机构做升降运动,从而实现挖穴以及对挖出的土壤进行收集。
参见图1-图5,所述履带式底盘1上安装有水平传感器11,所述水平传感器11用于实时检测设备的姿态变化,以此判断螺旋钻头9是否无法下降而导致履带式穴施机被顶起;当履带式穴施机处于带坡度的地面进行作业时,螺旋钻头9的下降阻力导致履带式穴施机的作业端翘起,使得水平传感器11读数发生变化,控制模块通过分析数据判断履带式底盘1此时是否处于具有侧翻的风险,并辅助判断螺旋钻头9是否挖到坚硬物体,若判断为具有侧翻的风险或挖到坚硬物体,即控制继电器断开液压动力控制器并控制智能挖穴模块3恢复至初始位置。
参见图1-图5,所述螺旋钻头9包括转动轴、设置在转动轴末端的钻头以及沿着所述转动轴竖向延伸的螺旋叶片,在螺旋钻头9转动的过程中,所述钻头插入土壤中,同时所述螺旋叶片在转动过程中可以将土壤进行向上输送,使得土壤进入到所述土壤收集筒4内,以此实现挖穴动作。
参见图1-图5,采用本发明的智能挖穴装置可以实现在挖穴过程中保护螺旋钻头9、降低动力损耗、减小操作难度和提高工作效率。具体是,在使用者通过遥控操控履带式穴施机进行作业时,将操作模式设置为智能模式,当控制挖穴装置进行向下挖穴时,安装在联轴器上的扭矩传感器和压力传感器可以实时采集螺旋钻头9的受力情况,通信模块将采集到的受力信息通过无线传输的方式传递给微型处理器(即控制模块),通过对数据进行处理分析,判断此时螺旋钻头9所挖土壤的硬度以及是否碰到坚硬物体,当螺旋钻头9碰到坚硬物体或树根等障碍物时,液压马达6继续提供动力,但螺旋钻头9无法继续向下正常工作,扭矩传感器和压力传感器的读数持续增大,微型处理器通过处理数据判断出此时不适合继续作业,控制继电器模组断开液压动力控制器以保护螺旋钻头9及动力,待螺旋钻头9停止旋转后,控制螺旋钻头9进行缓慢反向旋转,之后控制挖穴装置向上升起回到初始位置,减小操作难度;当所挖土壤土质较为松软时,螺旋钻头9受到的阻力较小,此时扭矩传感器和压力传感器的读数较小,微型处理器通过处理数据判断出此时作业阻力小,通过控制液压动力控制器加快螺旋钻头9的转速及下降速度,加快作业速度,提高工作效率;此外,履带式底盘1上安装的水平传感器11可以实时采集履带式穴施机的姿态变化信息,当履带式穴施机处于带坡度的地面进行作业时,螺旋钻头9的下降阻力导致履带式穴施机的作业端翘起,使得水平传感器11读数发生变化,控制模块通过分析数据判断履带式底盘1此时是否处于具有侧翻的风险,并辅助判断螺旋钻头9是否挖到坚硬物体,若判断为具有侧翻的风险或挖到坚硬物体,即控制继电器断开液压动力控制器并控制智能挖穴模块3恢复至初始位置,实现保护设备的目的。
参见图1-图5,本发明的履带式穴施机的智能挖穴装置的控制方法包括以下步骤:
S1、履带式穴施机在进行作业时,通过驱动模块12带动两组智能挖穴装置横向运动,升降机构7则带动挖穴机构以及土壤收集机构做升降运动,使得螺旋钻头9与土壤接触,接着挖穴驱动机构带动螺旋钻头9转动,从而进行挖穴,挖穴产生的土壤则通过土壤收集筒4进行收集;
S2、在挖穴过程中,扭矩传感器和压力传感器分别检测螺旋钻头9在挖穴过程中的扭矩和受力情况,通信模块将所述检测模块所检测的扭矩信息和压力信息上传给所述控制模块,而所述控制模块用于接收上传的扭矩信息和压力信息并进行计算和分析,判断此时螺旋钻头9所挖土壤的硬度,以及是否碰到坚硬物体;
S3、当螺旋钻头9碰到坚硬障碍物时,挖穴驱动机构继续提供动力,若螺旋钻头9无法继续向下正常工作,且扭矩传感器和压力传感器读数持续增大,且大于上限值时,控制模块通过处理数据判断出此时不适合继续作业,控制模块控制继电器断开液压动力控制器,在螺旋钻头9停止旋转后,控制螺旋钻头9进行缓慢反向旋转,进而控制智能挖穴模块3向上升起回到初始位置;
当所挖土壤土质为松软土质时,螺旋钻头9受到的阻力较小,此时的扭矩传感器和压力传感器读数较小,且小于下限值后,控制模块通过处理数据判断出此时的作业阻力小,通过加大螺旋钻头9的转速及下降速度,从而加快作业速度,提高工作效率;
S4、完成挖穴作业后,升降机构7驱动所述挖穴机构和土壤收集机构复位。
参见图1-图5,在步骤S3中,所述履带式底盘1上安装的水平传感器11可以实时采集履带式穴施机的姿态变化信息,当履带式穴施机处于带坡度的地面进行作业时,螺旋钻头9的下降阻力导致履带式穴施机的作业端翘起,使得水平传感器11读数发生变化,控制模块通过分析数据判断履带式底盘1此时是否处于具有侧翻的风险,并辅助判断螺旋钻头9是否挖到坚硬物体,若判断为具有侧翻的风险或挖到坚硬物体,即控制继电器断开液压动力控制器并控制智能挖穴模块3恢复至初始位置。
上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
- 一种用于激光直写曝光机气动门的控制装置及控制方法
- 一种用于饮水机的智能远程控制系统及其控制方法
- 一种废旧压缩机柔性智能切割方法、装置及其控制方法
- 一种用于装盒机的吸盒装置及吸盒控制方法
- 一种用于果树穴施的小型挖穴机
- 一种能够自动调整挖穴间隔的穴施机