一种车辆机动路径跟随控制方法及系统
文献发布时间:2023-06-19 19:23:34
技术领域
本发明涉及智能车辆自动驾驶技术领域,更具体的说,本发明涉及一种车辆机动路径跟随控制方法及系统。
背景技术
智能车辆技术主要包括智能车辆机动路径跟踪、车道保持、车辆换道等方面的技术,其中智能车辆机动路径跟踪控制的目的是使车辆沿着期望的机动路径行驶,现有技术中通过预瞄跟踪技术实现车辆机动路径跟踪,预瞄跟踪技术通过输入道路路径,在车辆前方设置预瞄点模拟驾驶员开车视线情况,分析预瞄点与路径的相对状态,结合车辆目前的行驶姿态,从而输出方向盘转角实现跟踪,中国专利申请号为202210643965.7的专利申请案中公开了一种车辆轨迹跟踪控制方法,该方案中通过分别获取车辆当前点与预瞄点的轨迹参数,并基于所述轨迹参数确定车辆从所述当前点到预瞄点所需的横向控制量和车辆姿态控制量;然后基于所述横向控制量和所述车辆姿态控制量确定车辆姿态控制补偿量;再基于所述横向控制量控制车辆的方向盘转角,并基于所述车辆姿态控制补偿量对车辆的车轮施加制动力,以控制所述车辆按照所述预瞄点所在的车辆轨迹行驶,通过对车辆的车轮施加制动力,从而补偿因按照横向控制量控制车辆的方向盘转角而导致的车辆姿态的偏差,但上述方案中当车辆处理紧急转向时,路径会产生曲率突变,影响车辆的稳定状态。
发明内容
本发明要解决的技术问题是提供一种车辆机动路径跟随控制方法及系统,以在车辆机动路径跟踪过程中车辆紧急转向时,降低路径曲率突变的影响。
为解决上述技术问题,本发明采用如下技术方案:
一方面,本发明一种车辆机动路径跟随控制方法,其包括如下步骤:
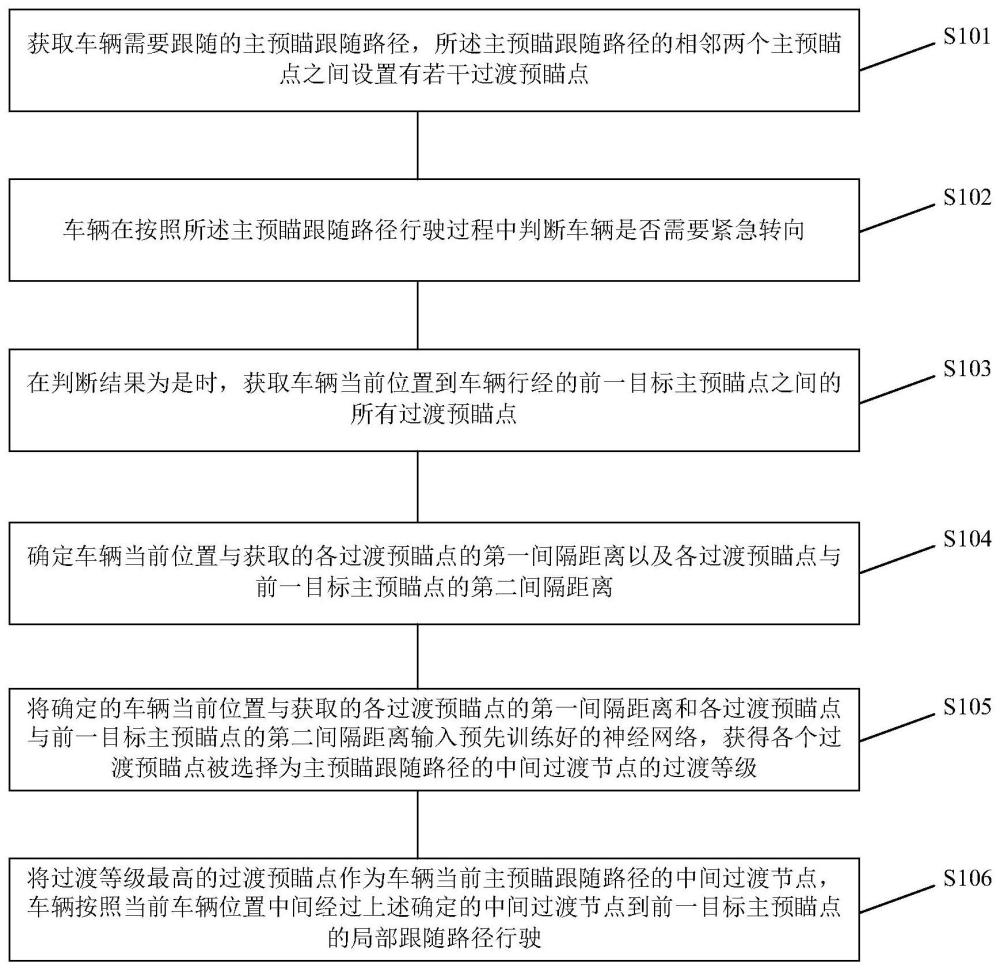
获取车辆需要跟随的主预瞄跟随路径,所述主预瞄跟随路径的相邻两个主预瞄点之间设置有若干过渡预瞄点;
车辆在按照所述主预瞄跟随路径行驶过程中判断车辆是否需要紧急转向;
在判断结果为是时,获取车辆当前位置到车辆行经的前一目标主预瞄点之间的所有过渡预瞄点;
确定车辆当前位置与获取的各过渡预瞄点的第一间隔距离以及各过渡预瞄点与前一目标主预瞄点的第二间隔距离;
将确定的车辆当前位置与获取的各过渡预瞄点的第一间隔距离和各过渡预瞄点与前一目标主预瞄点的第二间隔距离输入预先训练好的神经网络,获得各个过渡预瞄点被选择为主预瞄跟随路径的中间过渡节点的过渡等级;
将过渡等级最高的过渡预瞄点作为车辆当前主预瞄跟随路径的中间过渡节点,车辆按照当前车辆位置中间经过上述确定的中间过渡节点到前一目标主预瞄点的局部跟随路径行驶。
其中,获取车辆当前位置到车辆行经的前一目标主预瞄点之间的所有过渡预瞄点之前还包括:
判断当前车速是否超过预值;
若判断结果为是,则启动获取车辆当前位置到车辆行经的前一目标主预瞄点之间的所有过渡预瞄点;
若判断结果为否,则继续按照之前的主预瞄跟随路径行驶。
其中,获取车辆当前位置到车辆行经的前一目标主预瞄点之间的所有过渡预瞄点之后还包括:
以车辆当前位置为起始节点,搜索与车辆位置最近的过渡预瞄点,对该过渡预瞄点进行避障检测,若检测通过,则将其作为可选的过渡预瞄点,若检测不通过,则放弃该过渡预瞄点;继续搜索下一过渡预瞄点,直到遍历获取的过渡预瞄点。
其中,所述避障检测为通过雷达获取车辆前方的障碍物位置,判断过渡预瞄点位置是否在安全范围内,若判断结果为是,则检测通过,否则,检测不通过。
其中,所述神经网络可为反向传播神经网络。
另一方面,本发明一种车辆机动路径跟随控制系统,其包括:
主预瞄跟随路径获取处理单元,用于获取车辆需要跟随的主预瞄跟随路径,所述主预瞄跟随路径的相邻两个主预瞄点之间设置有若干过渡预瞄点;
判断处理单元,车辆在按照所述主预瞄跟随路径行驶过程中判断车辆是否需要紧急转向;
过渡预瞄点获取处理单元,用于在判断结果为是时,获取车辆当前位置到车辆行经的前一目标主预瞄点之间的所有过渡预瞄点;
间隔距离确定处理单元,用于确定车辆当前位置与获取的各过渡预瞄点的第一间隔距离以及各过渡预瞄点与前一目标主预瞄点的第二间隔距离;
过渡等级确定处理单元,用于将确定的车辆当前位置与获取的各过渡预瞄点的第一间隔距离和各过渡预瞄点与前一目标主预瞄点的第二间隔距离输入预先训练好的神经网络,获得各个过渡预瞄点被选择为主预瞄跟随路径的中间过渡节点的过渡等级;
控制处理单元,用于将过渡等级最高的过渡预瞄点作为车辆当前主预瞄跟随路径的中间过渡节点,车辆按照当前车辆位置中间经过上述确定的中间过渡节点到前一目标主预瞄点的局部跟随路径行驶。
另外,还包括:
车速判断处理单元,用于判断当前车速是否超过预值;若判断结果为是,则启动获取车辆当前位置到车辆行经的前一目标主预瞄点之间的所有过渡预瞄点;若判断结果为否,则继续按照之前的主预瞄跟随路径行驶。
另外,还包括:
避障检测处理单元,用于以车辆当前位置为起始节点,搜索与车辆位置最近的过渡预瞄点,对该过渡预瞄点进行避障检测,若检测通过,则将其作为可选的过渡预瞄点,若检测不通过,则放弃该过渡预瞄点;继续搜索下一过渡预瞄点,直到遍历获取的过渡预瞄点。
其中,避障检测处理单元是通过雷达获取车辆前方的障碍物位置,判断过渡预瞄点位置与障碍物是否在安全范围内,若判断结果为是,则检测通过,否则,检测不通过。
其中,所述神经网络为反向传播神经网络。
与现有技术相比,本发明具有以下有益效果:
本发明的方法及系统中,对于车辆紧急转向,预先在主预瞄点之间预设若干过渡预瞄点,将车辆紧急转向时确定的车辆当前位置与获取的各过渡预瞄点的第一间隔距离以及各过渡预瞄点与前一目标主预瞄点的第二间隔距离输入预先训练好的神经网络,获得各个过渡预瞄点被选择为主预瞄跟随路径的中间过渡节点的过渡等级;将过渡等级最高的过渡预瞄点作为车辆当前主预瞄跟随路径的中间过渡节点,车辆按照当前车辆位置中间经过上述确定的中间过渡节点到前一目标主预瞄点的局部跟随路径行驶,可以有效降低路径曲率突变的影响。
附图说明
图1是本发明车辆机动路径跟随控制方法的一个具体实施例流程图;
图2是本发明车辆机动路径跟随控制方法中训练的神经网络结构示意图;
图3是本发明车辆机动路径跟随控制系统的第一具体实施例组成框图;
图4是本发明车辆机动路径跟随控制系统的第二具体实施例组成框图;
图5是本发明车辆机动路径跟随控制系统的第三具体实施例组成框图。
具体实施方式
参考图1,该图是本发明车辆机动路径跟随控制方法的一个具体实施例流程图,本实施例的方法主要包括如下步骤:
在步骤S101,获取车辆需要跟随的主预瞄跟随路径,所述主预瞄跟随路径的相邻两个主预瞄点之间设置有若干过渡预瞄点,本实施例对于车辆紧急转向,在主预瞄跟随路径的相邻两个主预瞄点之间设置有若干过渡预瞄点,现有技术中预瞄点通常是根据预瞄距离进行设置,因此,过渡预瞄点的设置也可以根据预瞄距离进行设置,但作为一个优选的实施例,与现有技术不同,本实施例中过渡预瞄点不是按照预瞄距离进行设置,而是根据两个相邻主预瞄点之间的车辆行驶热点进行设置,即在相邻的两个主预瞄点之间的区域,选择若干车辆行驶热点作为过渡预瞄点,具体实现时,车辆行驶热点可根据最近一段时间内车辆行驶数据统计确定,这里不再赘述,而选择车辆行驶热点作为过渡预瞄点,由于是车辆行驶热点,即大多数的车辆已经在该热点路径上行驶,即代表该车辆行驶热点上极大概率不会有障碍物或者路况较好,后续车辆发生紧急转向等突发情况的概率很小,因此,也利于降低后续车辆行驶路径曲率突变,使车辆保持稳定行驶,提高后续车辆行驶的安全性。
在步骤S102,车辆在按照所述主预瞄跟随路径行驶过程中判断车辆是否需要紧急转向,具体实现时,若检测到车辆行驶的前方路径上有障碍物时,可以判断为需要紧急转向,或者发生其他紧急状况时可判断车辆需要紧急转向,这里不做具体限定。
步骤S103,在判断结果为是时,获取车辆当前位置到车辆行经的前一目标主预瞄点之间的所有过渡预瞄点,需要说明的,由于车速不高时,即使进行紧急转向,也不会产生较大的路径曲率突变,车辆可按照原来的跟随路径行驶,无需规划新的跟随路径,因此,本实施例中在获取车辆当前位置到车辆行经的前一目标主预瞄点之间的所有过渡预瞄点之前还可包括:
判断当前车速是否超过预值;若判断结果为是,则启动获取车辆当前位置到车辆行经的前一目标主预瞄点之间的所有过渡预瞄点;若判断结果为否,则继续按照之前的主预瞄跟随路径行驶;
另外,获取车辆当前位置到车辆行经的前一目标主预瞄点之间的所有过渡预瞄点之后还可对获取的过渡预瞄点进行筛选,以提前丢弃不合格的过渡预瞄点,提高系统处理的效率,作为一个优选的实施例,可按照下述方式进行筛选,即:
以车辆当前位置为起始节点,搜索与车辆位置最近的过渡预瞄点,对该过渡预瞄点进行避障检测,若检测通过,则将其作为可选的过渡预瞄点,若检测不通过,则放弃该过渡预瞄点;继续搜索下一过渡预瞄点,直到遍历获取的过渡预瞄点。
需要说明的,上述实施例中所述避障检测可通过雷达获取车辆前方的障碍物位置,判断过渡预瞄点位置是否在安全范围内,若判断结果为是,则检测通过,否则,检测不通过,这里不再赘述。
在步骤S104,确定车辆当前位置与获取的各过渡预瞄点的第一间隔距离以及各过渡预瞄点与前一目标主预瞄点的第二间隔距离,需要说明的,降低路径曲率突变,可通过将路径平滑实现,而对路径进行平滑处理,可通过将路径中即将经过的各节点的相互距离关系进行最小值优化处理,因此,本实施例中选择车辆当前位置与获取的各过渡预瞄点的第一间隔距离和各过渡预瞄点与前一目标主预瞄点的第二间隔距离这两个距离参数作为神经网络的输入数据,通过神经网络进行距离最小值优化处理,即通过神经网络判断经过哪个过渡预瞄点车辆与最近的主预瞄点偏离程度最小,则路径越平滑,路径曲率突变越小,过渡等级越高。
在步骤S105,将确定的车辆当前位置与获取的各过渡预瞄点的第一间隔距离和各过渡预瞄点与前一目标主预瞄点的第二间隔距离输入预先训练好的神经网络,获得各个过渡预瞄点被选择为主预瞄跟随路径的中间过渡节点的过渡等级,具体实现时,过渡等级例如可分为最好、好、中等、差、最差五个等级,另外本实施例中过渡等级对应以路径平滑度作为判断标准,路径平滑度最好的对应过渡等级最好,路径平滑度好的对应过渡等级好,依次类得到推过渡等级的中等、差、最差,这里不再赘述。
需要说明,本实施例对于过渡等级的判断是通过预先训练好的神经网络进行判断,神经网络是一种计算模型,由大量的节点(或神经元)直接相互关联而构成,神经网络可以根据输入的数据输出相应的分类,本实施例中即可通过神经网络输入某过渡预瞄点相关的第一间隔距离和第二间隔距离输出该过渡预瞄点对应的过渡等级,而为了实现预先训练好神经网络,作为一个优选的具体实施例,以神经网络采用反向传播神经网络为例,本实施例神经网络采用3层网络结构,包括输入层、隐含层和输出层,以车辆当前位置与过渡预瞄点的第一间隔距离和过渡预瞄点与前一目标主预瞄点的第二间隔距离作为输入层的输入数据,输出层输出该过渡预瞄点对应的过渡等级,该神经网络的具体网络模型如图2所示,预先进行训练时,建立图2所示的神经网络模型后,还需要通过训练集和验证集对神经网络模型进行训练,可首先采集100组的观测数据,将其中80组作为训练集,20组作为验证集,训练时神经网络对80组的训练集中各个预瞄过渡点相关的过渡预瞄点与车辆当前位置的第一间隔距离和过渡预瞄点与前一目标主预瞄点的第二间隔距离这两个输入距离数值,按照距离最小值进行优化处理,即通过神经网络判断经过哪个过渡预瞄点车辆与最近的主预瞄点偏离程度最小,则路径越平滑,路径曲率突变越小,过渡等级越高,按照训练好的神经网络即可根据各预瞄过渡点相关的第一间隔距离和第二间隔距离确定各预瞄过渡点的过渡等级,这里不再赘述。
最后在步骤S106,将过渡等级最高的过渡预瞄点作为车辆当前主预瞄跟随路径的中间过渡节点,车辆按照当前车辆位置中间经过上述确定的中间过渡节点到前一目标主预瞄点的局部跟随路径行驶。
上述实施例中,对于车辆紧急转向,由于预先在主预瞄点之间预设若干过渡预瞄点,在判断车辆紧急转向时,获取车辆当前位置到车辆行经的前一目标主预瞄点之间的所有过渡预瞄点,以车辆当前位置与获取的各过渡预瞄点的第一间隔距离以及各过渡预瞄点与前一目标主预瞄点的第二间隔距离作为神经网络的输入,获得各个过渡预瞄点被选择为主预瞄跟随路径的中间过渡节点的过渡等级;将过渡等级最高的过渡预瞄点作为车辆当前主预瞄跟随路径的中间过渡节点,车辆按照当前车辆位置中间经过上述确定的中间过渡节点到前一目标主预瞄点的局部跟随路径行驶,可以有效降低路径曲率突变的影响。
参考图3,该图是本发明车辆机动路径跟随控制系统的第一具体实施例组成框图,本实施例的系统主要包括:主预瞄跟随路径获取处理单元101、判断处理单元102、过渡预瞄点获取处理单元103、间隔距离确定处理单元104、过渡等级确定处理单元105和控制处理单元106,其中
主预瞄跟随路径获取处理单元101,主要用于获取车辆需要跟随的主预瞄跟随路径,所述主预瞄跟随路径的相邻两个主预瞄点之间设置有若干过渡预瞄点,本实施例对于车辆紧急转向,在主预瞄跟随路径的相邻两个主预瞄点之间设置有若干过渡预瞄点,现有技术中预瞄点通常是根据预瞄距离进行设置,因此,过渡预瞄点的设置也可以根据预瞄距离进行设置,但作为一个优选的实施例,与现有技术不同,本实施例中过渡预瞄点不是按照预瞄距离进行设置,而是根据两个相邻主预瞄点之间的车辆行驶热点进行设置,即在相邻的两个主预瞄点之间的区域,选择若干车辆行驶热点作为过渡预瞄点,具体实现时,车辆行驶热点可根据最近一段时间内车辆行驶数据统计确定,这里不再赘述。
判断处理单元102,主要用于车辆在按照所述主预瞄跟随路径行驶过程中判断车辆是否需要紧急转向,具体实现时,若检测到车辆行驶的前方路径上有障碍物时,判断处理单元102可以判断为需要紧急转向,或者发生其他紧急状况时判断处理单元102可判断需要紧急转向,这里不做具体限定。
过渡预瞄点获取处理单元103,主要用于在判断结果为是时,获取车辆当前位置到车辆行经的前一目标主预瞄点之间的所有过渡预瞄点。
需要说明的,由于车速不高时,即使进行紧急转向,也不会产生较大的路径曲率突变,车辆可按照原来的跟随路径行驶,无需规划新的跟随路径,因此,参考图4,作为一个优选的实施例,本发明车辆机动路径跟随控制系统中还可包括:车速判断处理单元107,用于判断当前车速是否超过预值;若判断结果为是,则启动获取车辆当前位置到车辆行经的前一目标主预瞄点之间的所有过渡预瞄点;若判断结果为否,则继续按照之前的主预瞄跟随路径行驶。
另外,获取车辆当前位置到车辆行经的前一目标主预瞄点之间的所有过渡预瞄点之后还可对获取的过渡预瞄点进行筛选,以提前丢弃不合格的过渡预瞄点,提高系统处理的效率,作为一个优选的实施例,参考图5,本发明车辆机动路径跟随控制系统中还可包括:避障检测处理单元108,用于以车辆当前位置为起始节点,搜索与车辆位置最近的过渡预瞄点,对该过渡预瞄点进行避障检测,若检测通过,则将其作为可选的过渡预瞄点,若检测不通过,则放弃该过渡预瞄点;继续搜索下一过渡预瞄点,直到遍历获取的过渡预瞄点。
需要说明的,避障检测处理单元108可通过雷达获取车辆前方的障碍物位置,判断过渡预瞄点位置是否在安全范围内,若判断结果为是,则检测通过,否则,检测不通过,这里不再赘述。
间隔距离确定处理单元104,主要用于确定车辆当前位置与获取的各过渡预瞄点的第一间隔距离以及各过渡预瞄点与前一目标主预瞄点的第二间隔距离,如前述,降低路径曲率突变,可通过将路径平滑实现,而对路径进行平滑处理,可通过将路径中即将经过的各节点的相互距离关系进行最小值优化处理,因此,本实施例中选择车辆当前位置与获取的各过渡预瞄点的第一间隔距离和各过渡预瞄点与前一目标主预瞄点的第二间隔距离这两个距离参数作为神经网络的输入数据,通过神经网络进行距离最小值优化处理,即通过神经网络判断经过哪个过渡预瞄点车辆与最近的主预瞄点偏离程度最小,则路径越平滑,路径曲率突变越小,过渡等级越高。
过渡等级确定处理单元105,主要用于将确定的车辆当前位置与获取的各过渡预瞄点的第一间隔距离和各过渡预瞄点与前一目标主预瞄点的第二间隔距离输入预先训练好的神经网络,获得各个过渡预瞄点被选择为主预瞄跟随路径的中间过渡节点的过渡等级,具体实现时,过渡等级例如可分为最好、好、中等、差、最差五个等级,另外本实施例中过渡等级对应以路径平滑度作为判断标准,路径平滑度最好的对应过渡等级最好,路径平滑度好的对应过渡等级好,依次类得到推过渡等级的中等、差、最差,这里不再赘述。
需要说明,本实施例中过渡等级确定处理单元105对于过渡等级的判断是通过预先训练好的神经网络进行判断,神经网络是一种计算模型,由大量的节点(或神经元)直接相互关联而构成,神经网络可以根据输入的数据输出相应的分类,本实施例中即可通过神经网络输入某过渡预瞄点相关的第一间隔距离和第二间隔距离输出该过渡预瞄点对应的过渡等级,而为了实现预先训练好神经网络,作为一个优选的具体实施例,以神经网络采用反向传播神经网络为例,本实施例神经网络采用3层网络结构,包括输入层、隐含层和输出层,以车辆当前位置与过渡预瞄点的第一间隔距离和过渡预瞄点与前一目标主预瞄点的第二间隔距离作为输入层的输入数据,输出层输出该过渡预瞄点对应的过渡等级,该神经网络的具体网络模型如图2所示,这里不再赘述。
控制处理单元106,主要用于将过渡等级最高的过渡预瞄点作为车辆当前主预瞄跟随路径的中间过渡节点,车辆按照当前车辆位置中间经过上述确定的中间过渡节点到前一目标主预瞄点的局部跟随路径行驶。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种车辆编队自主跟随控制系统及方法
- 一种用于控制车辆自适应巡航车距的方法及车用跟随行驶控制装置
- 用于求得将要驶过的轨迹和/或实施行驶干预的车辆系统的运行方法、控制系统的运行方法和机动车
- 辅助机动车辆驾驶员的方法、驾驶员辅助系统和机动车辆
- 一种面向车辆队列系统的自适应路径跟随控制方法
- 自动寻车位的路径跟随控制方法、系统、存储介质及车辆