一种鱼苗驯食池的智能清扫装置与方法
文献发布时间:2023-06-19 19:32:07
技术领域
本发明涉及驯食池清理技术领域,特别是涉及一种鱼苗驯食池的智能清扫装置与方法。
背景技术
现代渔业养殖大都采用工厂化循环水养殖方式,鱼苗驯食池规格一般有边长为3.75m的方切角池和直径6.4m的圆形池。由于鱼池的单体面积不大,一般养殖户都会建立数量很多的鱼苗驯食池,鱼苗驯食期间需要经常进行喂食并观察剩余饵料和粪便,以便量化分析鱼苗健康情况。
鱼苗驯食期间,由于不清楚池内鱼苗的鱼食需求量,往往会造成多撒鱼食情况,池内会累积剩余饵料和鱼苗粪便,若不进行清洗,就会污染水质影响鱼苗生长。数量庞大的鱼苗驯食池增大了清洗工作量,鱼池清洗方式一般采用人工手持板刷或者拖着水枪机四周环绕清洗,工作繁琐重复效率较低。现有的鱼池清扫机器人成本较高,且清扫能力有限、清扫效率较低,并未得到有效使用。并且在数量庞大的鱼苗驯食池中,鱼池清洗机器人也无法长时间工作。无法简易切换鱼池和大量回收剩余饵料和粪便,在切换鱼池和回收剩余饵料和粪便方面有较大的欠缺。
发明内容
本发明的目的是提供一种鱼苗驯食池的智能清扫装置与方法,解决对驯食池清扫不彻底和工作效率低等问题。
为实现上述目的,本发明提供了一种鱼苗驯食池的智能清扫装置与方法,包括驱动机构、清扫机构、驱赶机构、防护机构、引诱机构和监测机构,所述驱动机构的移动座通过螺纹套与所述清扫机构的调节杆螺纹连接,所述清扫机构的安装座上对称设置有所述驱赶机构,所述驱赶机构和所述清扫机构之间设置有所述防护机构,所述引诱机构与所述驱动机构连接,所述监测机构与所述移动座和所述清扫机构连接。
优选的,所述驱动机构包括移动架、第一驱动电机、第二驱动电机、第三驱动电机、第一丝杠、第二丝杠、旋转杆、第一限位座、第二限位座和所述移动座,所述第一限位座和所述第二限位座与所述移动架顶部连接,所述第一限位座滑动连接的所述第一驱动电机与所述第一丝杠连接,所述第二限位座滑动连接的所述第二驱动电机与所述第二丝杠连接,所述第一丝杠与所述移动座上部的第一螺纹孔螺纹连接,所述第二丝杠与所述移动座中部的第二螺纹孔螺纹连接,所述移动座下部设置有所述第三驱动电机,所述第三驱动电机连接的所述旋转杆贯穿所述移动座向下设置。
优选的,所述第一限位座与所述第二限位座之间的夹角为90°,所述第一丝杠与所述第一限位座之间的夹角为90°,所述第二丝杠与所述第二限位座之间的夹角为90°,所述第一驱动电机连接的第一滑块与所述第一限位座的第一滑轨滑动连接,所述第二驱动电机连接的第二滑块与所述第二限位座的第二滑轨滑动连接。
优选的,所述清扫机构包括所述调节杆、所述安装座、刮片、吸管头和过滤箱,所述调节杆与所述旋转杆下部的螺纹套螺纹连接,所述调节杆下部套设有所述安装座,所述调节杆底部与所述刮片连接,所述刮片两侧对称设置有所述吸管头,所述吸管头通过吸管与所述过滤箱顶部进水口连通。
优选的,所述过滤箱中上部的过滤腔内部由上至下依次设置有第一过滤网和第二过滤网,所述第一过滤网和所述第二过滤网均与所述过滤腔相匹配,所述第二过滤网的孔径小于所述第一过滤网的孔径,所述过滤箱下部与所述过滤腔连通,所述过滤箱下部设置有若干出水口,所述出水口处均设有第三过滤网。
优选的,所述驱赶机构包括塑料软棍和防水电机,所述安装座上部两侧均设有所述防水电机,所述防水电机与所述塑料软棍连接。
优选的,所述防护机构包括防护网和支撑架,所述安装座下部与所述支撑架连接,所述防护网包裹在所述支撑架外侧,所述支撑架呈半球形结构,所述清扫机构位于所述支撑架内部,所述支撑架底部高度高于所述刮片的底部高度。
优选的,所述引诱机构包括引诱灯,所述移动架顶部均匀设有若干所述引诱灯,所述移动架底部设置有万向轮,所述引诱灯的数量为四个,所述万向轮的数量为四个。
优选的,所述监测机构包括水上摄像头、水下摄像头和工控机,所述水上摄像头位于所述移动座底部一侧,所述水下摄像头与所述刮片连接。
优选的,所述过滤箱与所述移动架连接,所述过滤腔的数量为两个,每个所述过滤腔顶部均设置有所述进水口,所述出水口的数量为所述过滤箱靠近所述清扫机构一侧均匀设置的四个。
因此,本发明采用上述结构的一种鱼苗驯食池的智能清扫装置与方法,其有益效果为:
1、驱动机构适用于不同形状和大小的驯食池,在工控机的控制下,并对驯食池进行全方位无死角的清扫;
2、清扫机构可持续将驯食池中剩余的饵料和粪便排至过滤箱中,利用重力进行过滤分离,高效率回收粪便等废物的同时,对驯食池的水进行循环清理;
3、防护机构和驱赶机构在不影响对剩余饵料和粪便清理的同时,对鱼苗进行驱赶和保护,保证对驯食池的清理效果,防止鱼苗被意外清走;
4、水下摄像头对误入清扫机构的鱼苗进行自动识别,并根据鱼苗对清扫机构、防护机构和驱赶机构的工作状态进行调节,将鱼苗驱赶后再次清扫;
5、该发明的智能清扫装置可高效自主的完成清扫工作,并在不同驯食池之间切换,工作效率高,对鱼苗的保护率高。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
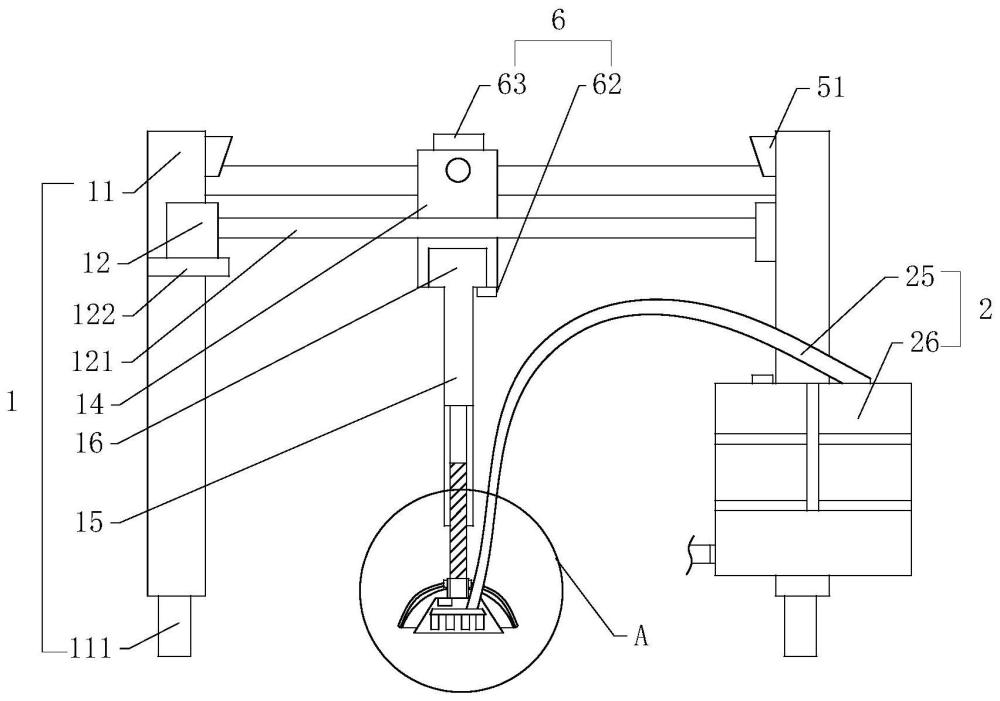
图1是本发明一种鱼苗驯食池的智能清扫装置正视剖面图;
图2是本发明一种鱼苗驯食池的智能清扫装置俯视图;
图3是本发明一种鱼苗驯食池的智能清扫装置A处放大图;
图4是本发明一种鱼苗驯食池的智能清扫装置A处放大图;
图5是本发明一种鱼苗驯食池的智能清扫装置过滤箱正视剖面图。
附图标记
1、驱动机构;11、移动架;111、万向轮;12、第一驱动电机;121、第一丝杠;122、第一限位座;13、第二驱动电机;131、第二丝杠;132、第二限位座;14、移动座;15、旋转杆;151、螺纹套;16、第三驱动电机;2、清扫机构;21、调节杆;22、安装座;23、刮片;24、吸管头;25、吸管;26、过滤箱;261、过滤腔;2611、第一过滤网;2612、第二过滤网;262、出水口;263、第三过滤网;3、驱赶机构;31、防水电机;32、塑料软棍;4、防护机构;41、防护网;42、支撑架;5、引诱机构;51、引诱灯;6、监测机构;61、水上摄像头;62、水下摄像头;63、工控机。
具体实施方式
以下通过附图和实施例对本发明的技术方案作进一步说明。
除非另外定义,本发明使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
图1是本发明一种鱼苗驯食池的智能清扫装置正视剖面图,图2是本发明一种鱼苗驯食池的智能清扫装置俯视图,图3是本发明一种鱼苗驯食池的智能清扫装置A处放大图,图4是本发明一种鱼苗驯食池的智能清扫装置A处放大图,图5是本发明一种鱼苗驯食池的智能清扫装置过滤箱正视剖面图,如图所示,一种鱼苗驯食池的智能清扫装置与方法,包括驱动机构1、清扫机构2、驱赶机构3、防护机构4、引诱机构5和监测机构6。驱动机构1的移动座14通过螺纹套151与清扫机构2的调节杆21螺纹连接,清扫机构2的安装座22上对称设置有驱赶机构3。驱赶机构3和清扫机构2之间设置有防护机构4,引诱机构5与驱动机构1连接,监测机构6与移动座14和清扫机构2连接。
驱动机构1用于带动智能清扫装置整体运动,实现对驯食池无死角的清理。清扫机构2对驯食池剩余饵料和粪便进行清扫,引诱机构5将鱼苗引走,便于清扫机构2的清扫。防护机构4和驱赶机构3相互配合,避免鱼苗进入工作中的清扫机构2处。监测机构6对驯食池内部情况进行监测,并控制驱动机构1移动,对驯食池进行清扫。
驱动机构1包括移动架11、第一驱动电机12、第二驱动电机13、第三驱动电机16、第一丝杠121、第二丝杠131、旋转杆15、第一限位座122、第二限位座132和移动座14。第一限位座122和第二限位座132与移动架11顶部连接,第一限位座122滑动连接的第一驱动电机12与第一丝杠121连接,第二限位座132滑动连接的第二驱动电机13与第二丝杠131连接。第一丝杠121与移动座14上部的第一螺纹孔螺纹连接,第二丝杠131与移动座14中部的第二螺纹孔螺纹连接。移动座14下部设置有第三驱动电机16,第三驱动电机16连接的旋转杆15贯穿移动座14向下设置。
移动架11与驯食池的大小相匹配,第一驱动电机12控制移动座14左右运动,第二驱动电机13控制移动座14前后移动。第一驱动电机12启动时,第一丝杠121转动通过移动座14带动第二驱动电机13左右运动。第二驱动电机13启动时,第二丝杠131转动通过移动座14带动第一驱动电机12前后运动。第一驱动电机12和第二驱动电机13的设置,便于移动座14移动至驯食池的任意位置。第三驱动电机16的设置,通过螺纹套151对清扫机构2、驱赶机构3和防护机构4的高度进行调节,以适应不同深度的驯食池底。
第一限位座122与第二限位座132之间的夹角为90°,第一丝杠121与第一限位座122之间的夹角为90°,第二丝杠131与第二限位座132之间的夹角为90°。第一驱动电机12连接的第一滑块与第一限位座122的第一滑轨滑动连接,第二驱动电机13连接的第二滑块与第二限位座132的第二滑轨滑动连接。第一限位座122、第一滑轨和第一滑块的设置,便于第一驱动电机12在第二驱动电机13的带动下顺利运动。第二限位座132、第二滑轨和第二滑块的设置,便于第二驱动电机13在第一驱动电机12的带动下顺利运动。第一限位座122对侧设置有第三限位座,第三限位座滑动连接的第一轴承座与第一丝杠121末端的第一轴承连接。第二限位座132对侧设置有第四限位座,第四限位座滑动连接的第二轴承座与第二丝杠131末端的第二轴承连接。
清扫机构2包括调节杆21、安装座22、刮片23、吸管头24和过滤箱26,调节杆21与旋转杆15下部的螺纹套151螺纹连接,调节杆21下部套设有安装座22。调节杆21底部与刮片23连接,刮片23两侧对称设置有吸管头24,吸管头24通过吸管25与过滤箱26顶部进水口连通。
吸管头24的数量为刮片23一侧四个,吸管25的数量为刮片23一侧两个。旋转杆15在第三驱动电机16的带动下旋转,螺纹套151转动来调整调节杆21的高度。进而控制刮板和吸管头24的高度,保证二者始终与驯食池底接触,将剩余饵料和粪便清理干净。
过滤箱26中上部的过滤腔261内部由上至下依次设置有第一过滤网2611和第二过滤网2612。第一过滤网2611和第二过滤网2612均与过滤腔261相匹配,第二过滤网2612的孔径小于第一过滤网2611的孔径。过滤箱26下部与过滤腔261连通,过滤箱26下部设置有若干出水口262,出水口262处均设有第三过滤网263。
吸管头24吸走的饵料和粪便连同水一起进入过滤箱26内部一侧的过滤腔261中,第一过滤网2611和第二过滤网2612对废水进行两次过滤处理,将废水中的杂质拦截。过滤完的水经出水口262流回驯食池,实现水的循环利用。第一过滤网2611和第二过滤网2612孔径的设置,保证将废水中的杂质清理干净。
驱赶机构3包括塑料软棍32和防水电机31,安装座22上部两侧均设有防水电机31,防水电机31与塑料软棍32连接。塑料软棍32在防水电机31的带动下摆动,将靠近清扫机构2处的鱼苗驱赶走。
防护机构4包括防护网41和支撑架42,安装座22下部与支撑架42连接,防护网41包裹在支撑架42外侧。支撑架42呈半球形结构,清扫机构2位于支撑架42内部,支撑架42底部高度高于刮片23的底部高度。支撑架42形状的设置,与防护网41相互配合,将清扫机构2罩住,避免鱼苗进入清扫机构2。支撑架42底部高度的设置,防止剩余饵料和粪便被阻拦在防护网41外。
引诱机构5包括引诱灯51,移动架11顶部均匀设有若干引诱灯51,移动架11底部设置有万向轮111,引诱灯51的数量为四个,万向轮111的数量为四个。引诱灯51位于移动架11的四角,引诱灯51打开后可照向驯食池底部,鱼苗的趋光性使得鱼苗向照明处运动,便于清扫机构2对未照明处进行清理。万向轮111的设置,便于将移动架11在不同驯食池之间移动。
监测机构6包括水上摄像头61、水下摄像头62和工控机63,水上摄像头61位于移动座14底部一侧,水下摄像头62与刮片23连接。水上摄像头61可观察整个驯食池的情况,对清理的位置进行监测,水下摄像头62识别清扫过程中是否有鱼苗靠近清扫机构2。工控机63的设置,对清扫机构2的清扫路线进行规划,以保证对驯食池的全覆盖清扫。
水上摄像头61监测驯食池中的清扫状况,若发现一次清理后仍有大量粪便,可将该位置转换为坐标,便于驱动机构1将清扫机构2移动至该区域,工控机63规划该区域的清扫路线后进行二次清扫。若水下摄像头62监测到大量鱼苗,则启动驱赶机构3并将防护机构4抬高,以保护鱼苗。
过滤箱26与移动架11连接,过滤腔261的数量为两个,每个过滤腔261顶部均设置有进水口,出水口262的数量为过滤箱26靠近清扫机构2一侧均匀设置的四个。过滤腔261数量的设置,便于其中一个使用时对另一个进行清理。两个过滤腔261均与过滤箱26下部连通,出水口262将过滤完的水进行最后过滤,再排回驯食池。
使用时,将移动架11移动至驯食池上方,人为控制第一驱动电机12和第二驱动电机13,带动移动座14绕驯食池边缘移动一周,录入驯食池的形状和大小。
开启移动架11一侧的引诱灯51,将鱼苗引诱至驯食池一侧。启动第三驱动电机16,将清扫机构2与驯食池底接触,工控机63根据录入信息控制清扫机构2的运动路线,对驯食池未开引诱灯51的一侧进行清理。
水上摄像头61对驯食池整体的清扫效果进行监测,发现某一区域清理不彻底后进行二次清扫。水下摄像头62对清扫机构2处的鱼苗进行监测,发现鱼苗聚集后抬高清扫机构2,并启动驱赶机构3驱赶鱼苗。
对驯食池一侧清扫完毕后,开启该侧的引诱灯51,便于对未清扫的一侧进行清扫。重复上述清扫动作后结束工作,再将移动架11移动至下一驯食池进行清扫。
最后应说明的是:以上实施例仅用以说明本发明的技术方案而非对其进行限制,尽管参照较佳实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对本发明的技术方案进行修改或者等同替换,而这些修改或者等同替换亦不能使修改后的技术方案脱离本发明技术方案的精神和范围。
- 一种智能制造的数据库资源池的实时同步方法及装置
- 一种智能化粮仓仓底清扫收集装置
- 一种鱼苗自动分离装置及控制方法
- 一种横扫式侧向流斜板沉淀池除泥智能控制一体化装置
- 一种用于大口黑鲈鱼苗驯食的辅助装置
- 一种鱼苗自动驯食装置