一种模块化自重构空间软体机器人
文献发布时间:2023-06-29 06:30:04
技术领域
本发明涉及太空的在轨服务技术及安全防护技术领域,特别涉及一种模块化自重构空间软体机器人。
背景技术
日益增多的太空碎片增加了在轨航天器以及舱外作业宇航员的安全威胁。而机器人等领域的迅猛发展和技术革新显著降低了空间任务的系统风险。诸如在轨服务、空间运输、行星表面采样与返回等空间探测任务和科学实验均可由机器人来完成。
目前主要采用刚性机器人完成空间作业任务,然而传统刚性机器人在执行作业中有诸多局限:1)连杆刚度较大,不能较好的缓冲空间碎片的碰撞;2)在人机交互作业时,无法安全的同执行人员协作;3)面对复杂环境进行作业时,有限的自由度和负载无法完成实际工作要求。因此现有刚性机器人还存在对空间作业环境适应力差、作业安全性低的问题,从而导致无法安全稳定地完成所有类型作业。
发明内容
本发明目的是为了解决现有空间机器人还存在对空间作业环境适应力差、作业安全性低的问题,从而导致无法安全稳定地完成所有类型作业的问题,而提出了一种模块化自重构空间软体机器人。
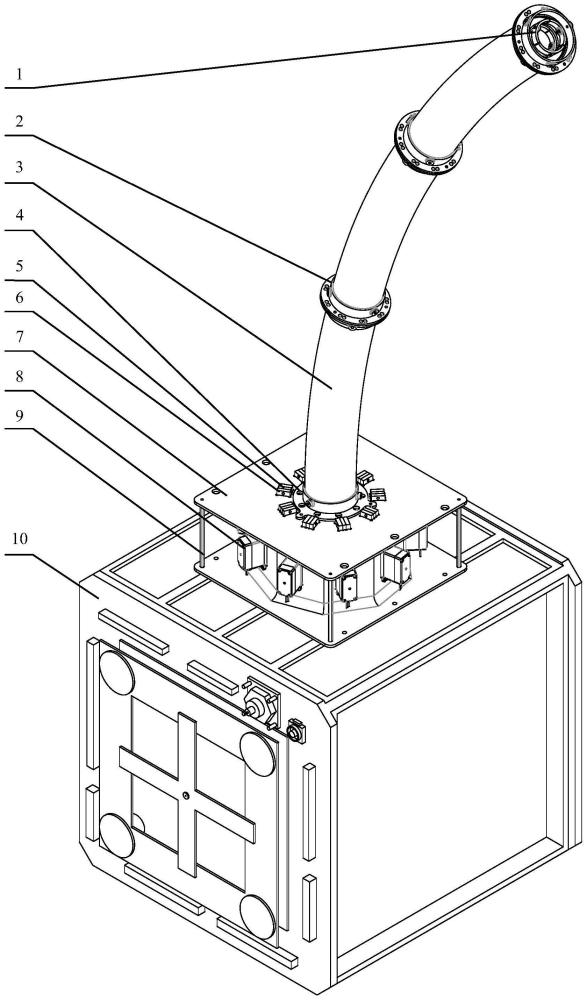
一种模块化自重构空间软体机器人包括:软体臂、软体臂底座、自由基座10;
所述软体臂由N段弾性轴3通过弾性轴固定环相互连接构成;每组弾性轴固定环包括:一个弾性轴固定内环1、一个弾性轴固定外环2;所述弾性轴固定内环1包括a个弧形件,a个弧形件依次排布构成环形;所述弾性轴固定内环1与每段弾性轴两端的内壁紧密贴合;所述弾性轴固定外环2和除与软体臂底座相连端外的每段弾性轴两端的外壁紧密贴合;设置在弾性轴3同一端的弾性轴固定内环1、弾性轴固定外环2通过螺栓与弾性轴3固定;相邻两段弾性轴上的弾性轴固定外环2通过螺栓连接;所述弾性轴固定外环2上均匀分布bN对绳孔;与软体臂底座相连端的弾性轴3外壁上固定有底部弾性轴固定外环4;所述底部弾性轴固定外环4上设有bN个绳孔;所述底部弾性轴固定外环4、弾性轴3、弾性轴内环1通过螺栓固定连接;
其中,b≥3;
所述软体臂底座包括:滑轮座固定块5、滑轮座6、上部碳板7、电机8、支撑柱9、底座下板11、绕线轮12;
所述底部弾性轴固定外环4固定在上部碳板7上;所述上部碳板7与底座下板11平行设置;上部碳板7和底座下板11之间的中心处设有多边形壳体;所述多边形壳体为由多个侧面构成的壳体;所述支撑柱9支撑在上部碳板7和底座下板11之间;所述滑轮座固定块5绕固定在上部碳板7上的底部弾性轴固定外环4均匀固定在上部碳板7上;所述滑轮座6带有滑轮13;所述滑轮座6设置在上部碳板7的槽口中,与滑轮座固定块5相连;所述电机8通过槽口穿过多边形壳体侧面并固定在多边形壳体上;所述电机8与滑轮座6一一对应设置;所述电机8绕线轮12转动;所述绕线轮12上缠有绳子;所述绕线轮12设置在上部碳板7下方;所述绕线轮12上的绳子通过滑轮13换向后经过底部弾性轴固定外环4上的绳孔连接到不同弾性轴固定外环2上的绳孔上;每个弾性轴固定外环2上间隔均匀系有b根绳子;所述底座下板11固定在自由基座10上。
优选地,所述绕线轮12与电机8通过电机内置螺纹连接。
优选地,所述支撑柱9通过切口固定在上部碳板7和底座下板11之间。
优选地,所述电机8的数量为9个。
优选地,所述弾性轴3的数量n=3。
进一步地,所述自由基座10包括:能量存储机构、能量转换接口和末端-基座接口;
所述能量存储机构用于对模块化自重构空间软体机器人相连的绳系执行器提供能量;
所述能量转换接口用于连接航天器,并为航天器补充能量;
所述末端-基座接口用于连接其他模块化自重构空间软体机器人,并与其他模块化自重构空间软体机器人交换能量。
优选地,述软体臂末端安装有视觉传感器。
优选地,每个滑轮座(6)带有两个滑轮(13)。
一种模块化自重构空间软体机器人组,包括多个模块化自重构空间软体机器人;所述软体机器人组包括以下工作模式:串联工作模式、并联工作模式、环形防御工作模式;
所述串联工作模式为将多个模块化自重构空间软体机器人串联;所述并联工作模式为将多个模块化自重构空间软体机器人并联;所述串联工作模式和并联工作模式均用于实现目标的装配和搬运;
所述环形防御工作模式为将多个模块化自重构空间软体机器人围成环形,用于防御空间碎片的碰撞。
本发明的有益效果为:
本发明将机械臂设置为软体机械臂,使机械臂得能够以柔性的方式缓冲碰撞,既可避免在防护航天器时产生新的空间碎片,也可在人机协作方面提高工作的安全性。本发明提出的软体机器人可以通过任务的特点进行自重构,搭建适应于任务的机器人系统构型,提高了机器人对空间作业环境的适应能力。本发明提出软体机器人具有模块化的特点,使软体机器人可针对受损模块进行独立更换,提高经济效益。本发明能够通过自重构工作于串并联模式,提高了软体机器人的工作空间和负载能领,增强了航天器系统执行大负载空间柔顺装配的能力;本发明提出的软体机器人还可以工作于环形防御模式,可以为航天器提供防护,保护航天器免受空间碎片的碰撞。
附图说明
图1为本发明轴测图;
图2为本发明底座下视图;
图3为空间模块化自重构软体机器人串联工作模式图;
图4为空间模块化自重构软体机器人并联工作模式图;
图5为空间模块化自重构软体机器人环形防御工作模式图;
图6为弾性轴固定环放大图。
具体实施方式
具体实施方式一:如图1所示,本实施方式一种模块化自重构空间软体机器人,包括:软体臂、软体臂底座、自由基座10;
所述软体臂为三关节软体臂,由三段弾性轴3通过弾性轴固定环相互连接构成;所述弾性轴固定环的数量为6;每组弾性轴固定环包括一个弾性轴固定内环1和一个弾性轴固定外环2(如图6所示);所述弾性轴固定内环1包含三个弧形件,三个弧形件相互连接可构成环形;所述弾性轴固定内环1与每段弾性轴两端的内壁紧密贴合,所述弾性轴固定外环2和除与软体臂底座相连端外的每段弾性轴两端的外壁紧密贴合;设置在弾性轴3同一端的弾性轴固定外环2和弾性轴固定内环1通过螺栓与弾性轴3拧紧使得内外环距离减小,从而将弹性轴夹紧在内外环之间,完成弹性轴的固定;相邻两段弾性轴上的弹性轴固定外环2通过三个螺栓面对面紧密连接;所述弾性轴固定外环2上均匀分布九对绳孔;所述软体臂与软体臂底座相连端的弾性轴3外壁上设有底部弾性轴固定外环4;所述底部弾性轴固定外环4上设有9个绳孔;所述底部弾性轴固定外环4、弾性轴3、弾性轴固定内环1通过螺栓紧密连接;所述底部弾性轴固定外环4上设有三个螺栓孔;
如图2所示,所述软体臂底座包括:滑轮座固定块5、滑轮座6、上部碳板7、电机8、支撑柱9、底座下板11、绕线轮12;
所述底部弾性轴固定外环4与上部碳板7通过螺栓固定连接;所述上部碳板7和底座下板11平行设置;上部碳板7和底座下板11之间的中心设有九边形壳体;所述九边形壳体与底座下板为一体结构;所述九边形壳体为由九个侧面构成的壳体;所述九边形壳体以底座弾性轴固定外环4对应到底座下板上的位置为几何中心;所述支撑柱9为四个,通过对应切口安装在上部碳板7和底座下板11之间;所述支撑柱9位于底座下板11的四个角上,用于支撑上部碳板7;所述滑轮座固定块5绕固定在上部碳板7上的底部弹性轴固定外环4均匀固定在上部碳板7上;所述滑轮座6带有两个滑轮13;所述滑轮座6设置在上部碳板7的槽口中并在上方露出一部分,通过螺栓与滑轮座固定块5连接;所述电机8的数量为9个;所述电机8通过槽口穿过九边形壳体的侧面,并固定在九变形壳体上;所述电机8与滑轮座6一一对应设置;所述电机8驱动绕线轮12转动;所述绕线轮12上缠有绳子;所述绕线轮12设置在上部碳板7下方;所述电机8与绕线轮12通过电机内置螺纹连接;所述绕线轮12上的绳子通过滑轮13换向后经过底部弾性轴固定外环4上的绳孔连接到不同弾性轴固定外环2上的绳孔;每个弾性轴固定外环2上系有三根绳子;所述底座下板11通过四颗螺栓固定在自由基座10上。
原理说明:软体臂的动力源于驱动电机8,九个驱动电机8使得绕线轮12进行转动,而绕线轮12上缠有绳子,绳子通过滑轮13进行换向后再经过底部弹性轴固定外环4上设置的绳孔,到达第一个弾性轴连接处,间隔均匀的三根绳子系在第一个接口处的弾性轴固定外环2对应的绳孔上,其他六根绳子穿过第一个弾性轴接口处的弾性轴固定外环2上的绳孔,到达第二个弾性轴连接处,间隔均匀的三根绳子系在第二个接口处的弾性轴固定外环2对应的绳孔上;剩余三根绳子穿过第二个接口处的弾性轴固定外环2上的绳孔,系在最后一个弾性轴固定外环2的绳孔上,可以实现全驱全自由度控制,软体臂末端安装视觉传感器,用于目标检测与位置伺服控制。三关节软体臂主要用于多种空间任务下的服务工作,控制器通过控制绳系驱动电机的角度,对软体关节连杆进行位置与姿态进行调整,精确控制软体机器人的位置姿态所需工作区域。软体关节末端设计统一化接口,可通过接口与其他软体机器人进行重构连接,同时可通过接口进行能量交换。
具体实施方式二:所述自由基座包括:能量存储机构、能量转换接口和多个末端-基座接口;
所述能量存储机构用于对三关节软体臂的绳系执行器提供能量;
所述末端-基座接口用于连接多个软体机器人,并与其他软体机器人进行能量交换;
所述能量转换接口用于连接软体机器人与航天器,对航天器进行能量补充;
本具体实施方式中,基座部分由能量存储机构、能量转换接口和多个末端-基座拼接口组成,模块化自由飞行基座保留的能量接口可通过与航天器连接能量补充,基座通过接口对所搭载的三关节软体臂的绳系执行器提供能量,同时可通过末端-基座拼接口与其他软体机器人进行重构连接,在协同工作的同时可与其他软体机器人进行能量交换。模块化自由飞行基座可通过接口与航天器进行连接,协助航天器进行工作,也可以自由飞行执行航天器轨道之外的精密作业。此外,可与其他单体软体机器人进行串行连接,提供工作空间/任务空间扩大服务及环形防御全天候主动安全保障服务。
具体实施方式三:一种模块化自重构空间软体机器人组,包括多个模块化自重构空间软体机器人;所述软体机器人组包括以下工作模式:串联工作模式、并联工作模式、环形防御工作模式,具体为:
本发明模块化自重构空间软体机器人组可工作于三种模式下,图3、图4及图5分别为其串联工作模式、并联工作模式及环形防御工作模式。
在串联工作模式下,所设计的空间模块化柔性安全服务系统能够通过其自重构特性有效扩大航天器的工作空间/任务空间,对于航天器系统的大范围空间任务安全柔顺执行具有重要意义。图3为所设计的新型模块化自重构空间软体机器人系统串联模式空间装配工作演示,机器人携带的视觉传感器检测目标位置,并通过距离计算出需要串联重构的机器人数量并进行自重构,重构完成后机器人控制器计算串联臂末端的期望位置姿态并在空间中规划运动轨迹,经过逆向运动学计算,求解绳系驱动电机的期望角度从而使关节运动到期望角度,实现对目标的大范围搬运。同时从图3中可以看出,相对传统空间机器人工作范围固定的特性,空间软体机器人系统能够通过其自重构能力有效扩大航天器的工作空间/任务空间,同时由于软体关节的材质特征,在空间人机协作过程中能够对宇航员进行有效的保护,使得航天器系统具有执行大范围空间柔顺装配的能力。
并联工作模式下,机器人负载能力将得到提高,同时并联系统能够保证系统实现更精细化的空间作业,增强航天器系统执行大负载空间柔顺装配的能力。图4为所设计的新型模块化自重构空间软体机器人系统并联模式空间装配工作演示,机器人携带的视觉传感器检测目标位置,并通过工作负载和距离计算出需要并联重构的机器人数量并进行自重构,重构完成后机器人控制器计算并联臂末端的期望位置姿态并在空间中规划运动轨迹,经过逆向运动学计算,求解绳系驱动电机的期望角度并使关节运动到期望角度,实现对目标的精确搬运装配。从图4中可以看出,相对传统空间机器人负载范围及工作范围固定的特性,空间软体机器人系统能够通过其自重构能力有效增大系统的负载范围,同时并联构型能够保证系统实现更精细化的空间作业。
环形防御工作模式用于保护航天器,在该模式下,防御环通过基座机动能够对同一平面任意方向的空间碎片的碰撞进行安全缓冲,同时在缓冲空间碎片碰撞的过程中不产生新的碎片;多个防御环可搭建出圆柱状防御墙,同时单个防御环可对形状进行自重构调整扩大其防御空间,适应于较大规模的航天器防御保护。图5为所设计的新型模块化自重构空间软体机器人系统环状防御模式下与航天器联合运行工作。机器人自重构并运行于环形防御模式时,圆环型机器人系统能够和被保护的航天器进行联合工作,在航天器外围形成一套保护层,并将需要保护的精密航天器进行包围,通过其自调整能够使得软体关节实现对航天器的任务操作全方位进行防护。此时,当空间碎片向航天器碰撞而来时,该系统还能通过主动调节让软体关节对碎片进行阻挡。同时,软体关节能够吸收空间碎片碰撞产生的能量并以此能量将空间碎片从航天器运行轨道中清除。在航天器较大时,也可通过多个环形防御圈组合成圆柱面的形式提供更大的防护层。
- 一种外肢体机器人模块单元及模块化可重构外肢体机器人
- 可重构模块化软体机器人、重构方法及集群方法
- 可重构模块化软体机器人、重构方法及集群方法