用于运行与道路关联的全轮驱动车辆的方法和控制装置
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及用于运行与道路关联的全轮驱动车辆的方法和控制装置,所述全轮驱动车辆具有至少一个电子控制单元、具有配属于初级轴(例如后轴)的第一电驱动马达并且具有配属于次级轴(例如前轴)的第二电驱动马达。
背景技术
例如由DE102014200427A1已知一种与道路关联的混合动力车辆,所述混合动力车辆具有两个不同的在相应的轴上的驱动单元。不同的驱动单元、特别是内燃机和电驱动马达具有不同的动态特性;也就是说,在各个轴上的额定力矩不能同样快地调节。特别是,借助于电驱动马达的力矩提高比借助于内燃机的相同的力矩提高能明显更快。由DE102014200427A1已知的电子控制装置特别是针对这些不同的驱动单元的问题。
在所谓的与道路关联的全轮驱动车辆中,初级马达和次级马达不是经由离合器、而是仅经由车轮通过道路与驱动有关地耦联。这种与道路关联的全轮驱动车辆也被称为“分轴(Axle-Split)”车辆。这种全轮驱动车辆一般在第一运行模式(优选是效率优化的驱动模式)中仅以初级马达来运行并且在第二运行模式(优选是功率优化的驱动模式)中也可作为具有两个驱动马达的全轮驱动车辆来运行,在所述第二运行模式中可自动地接通和关断次级马达。
以下将“电驱动马达”也简称为“电动机”并且将“驱动转矩”也简称为“力矩”。
发明内容
本发明的任务是,在行驶功率、效率以及舒适性方面改善开头所述类型的全轮驱动车辆。
根据本发明,所述任务通过独立权利要求的技术方案来解决。从属权利要求是本发明的有利的改进方案。
本申请涉及在存在也为电动的初级马达的情况下用于自动接通和关断电动的次级马达的不同策略。在现有技术中,在此一般以将驱动力矩分配到用于提高牵引力的轴上的方式强调以行驶稳定性为导向的行驶。
本发明涉及一种用于运行与道路关联的全轮驱动车辆的控制装置,所述全轮驱动车辆具有至少一个电子控制单元、具有配属于初级轴的第一电驱动马达(初级马达)并且具有配属于次级轴的第二电驱动马达(次级马达)。控制单元包含动态功能模块,使得在初级马达激活并且次级马达停用的(单轴)运行方式期间在借助于驾驶员期望梯度识别出驾驶员的限定的动态驾驶方式时,对于预设的时间窗确定通过新的驾驶员期望预设的总额定力矩变化曲线。所述总额定力矩变化曲线根据也预设的轴分配系数通过减小初级马达的额定力矩并通过激活以及提高次级马达的额定力矩来调节,即使预设的总额定力矩变化曲线低于初级马达的最大可能力矩。
优选地,控制单元还构造为,使得在从次级马达的关闭的磁场出发要求激活次级马达时预先确定所需要的磁化时间作为预设的延迟时间。初级马达对于该延迟时间的持续时间单独地提供所要求的总额定力矩。然后才根据预设的全轮驱动分配系数同步调整两个电驱动马达的额定力矩。
所述次级马达的磁场的接通以及因此延迟时间例如在借助于驾驶员期望识别出惯性滑行-牵引转换(Schub-Zugwechsel)时开始。附加地或备选地,可以在识别到初级马达的负荷提高时开始次级马达的磁场的接通以及因此开始延迟时间。
借助于驾驶员期望梯度来识别驾驶员的限定的动态驾驶方式,优选地在当前的驾驶员期望梯度超过预设的阈值时。
优选根据驾驶员期望梯度以及根据通过驾驶员期望预设的额定力矩与初级马达的当前可用的力矩之差来确定所述预设的总额定力矩变化曲线。
本发明基于以下考虑:
基本构思是在具有两个电驱动马达的电气化车辆的不稳定的过程中的全轮驱动的驱动策略,所述两个电驱动马达是在初级轴上的第一电(驱动)马达和用于次级轴的第二电(驱动)马达。
出于效率原因可能有意义的是,在电气化的全轮驱动车辆中尽可能长时间地在单轴运行(后轮驱动或前轮驱动)中行驶。在优选单轴运行中被驱动的轴被称为初级轴。
在动态的(“不稳定的”)驾驶方式中,出于功率原因有意义的是,提早接通第二轴(次级轴),以便产生车辆的运动型的功率反应(也称为“响应(Response)”或“冲击(Punch)”)。动态驾驶方式特别是借助于加速踏板操纵的陡峭的梯度来识别(也称为“急踩油门(Tip-in)”)。
各个驱动轴(具有初级马达的初级轴和具有次级马达的次级轴)仅通过相应的软件在至少一个电驱动控制器中耦联。不存在如在常规的全轮驱动车辆中那样的经由分动器中的纵向离合器的耦联。
因为两个驱动轴分别能够通过至少一个电动机驱动,所以当它们不能通过离合器与驱动器脱耦时,它们能够通过断开磁场(在他励电动机的情况下)而被去激励。在本发明中,出于成本原因应当优选省去这种离合器。
次级轴的延迟耦合或次级马达的延迟的磁场激励和由此(过)晚的全轮接通导致在急踩油门过程中的不舒适的颠簸、在调节额定力矩时的延迟,牵引力下降和/或在驱动轴上的过高的扭矩梯度。
根据本发明的控制装置包括电子控制单元,所述电子控制单元基于对急踩油门的识别来计算和预设以轴分配系数形式的限定的全轮分配。优选经由存在的驾驶员期望梯度超过阈值并且优选经由驾驶员期望与初级驱动单元的当前可用的转矩的差(Delta)来识别急踩油门;也就是说,当对加速踏板(或者其他的驾驶员期望操作元件)的操纵的加速度大于预设的第一阈值并且当优选在初级马达的实际力矩与初级马达的通过新的驾驶员期望预设的额定力矩之间的差大于预设的第二阈值时识别急踩油门。由此能提早实现全轮接通或次级马达的接通。
在识别急踩油门之后,根据本发明开始一个确定的时间窗,在所述时间窗内确定通过新的驾驶员期望预设的总额定力矩变化曲线(高度和梯度)并且借助于预设的轴分配系数通过在两个轴上的两个电动机进行调整。在此,降低初级马达的额定力矩并且提高次级马达的额定力矩。
次级马达的磁场优选在惯性滑行运行中被关断。如果在识别急踩油门的范畴内识别出从滑动到牵引的转换,则必须在力矩能够增大之前从关断的磁场出发首先(再次)激励磁场。由此在提高次级马达的额定力矩之前产生延迟时间。
在此,在第一备选方案中,次级马达的额定力矩可以首先通过初级马达的额定力矩的相应提高来暂时地被补偿,只要由此初级马达的额定力矩还低于初级马达的最大可能的力矩。
然而,在有利的第二备选方案中,使总额定力矩的提高总体上延迟对于激励磁场所需的延迟时间(30ms的数量级)。发明人在此已经认识到,这种延迟时间对于驾驶员来说是不能察觉的(即,不是“能分辨的”)。因此,可以同步地提高两个轴的额定力矩,由此还进一步提高舒适性。
通过本发明例如可以预先给定以下方法流程:
1、根据运行参数、例如温度或打滑来计算每个轴的最大可调的力矩。
2、检查由驾驶员所期望的总额定力矩是否小于初级轴的最大可调的力矩。
3、计算驾驶员期望升高的梯度以及在与该升高之前存在的驾驶员期望相对应的力矩与在该升高之后存在的驾驶员期望相对应的力矩之差(也被称为“差值”或“偏置”)。
4、在考虑这两个轴的最大可调的力矩的情况下,根据3的结果计算全轮驱动分配系数。
5、计算动态功能,能通过所述动态功能对于预设的时间窗通过所述两个轴的电动机来调节的总额定力矩变化曲线(根据事先确定的驾驶员期望升高的偏置和梯度)。
6、检测惯性滑行-牵引转换和反之检测牵引-惯性滑行转换。
7、根据预设的条件、例如根据初级马达的负荷状态计算全轮驱动分配系数。
8、检验超过阈值,以便预先激活次级马达的耦合或激励以及实现预设的全轮驱动分配系数。
通过本发明,现在不再是只有对总力矩的调整获得最高的优先级,而且还与效率、功率和舒适度有关地考虑到各轴转矩的优化的分配。
附图说明
在以下实施例中借助附图更详细地阐述本发明的细节。图中:
图1示出根据本发明的与道路关联的电动全轮驱动车辆的示意图,所述电动全轮驱动车辆具有对于根据本发明的动态功能来说重要的部件;
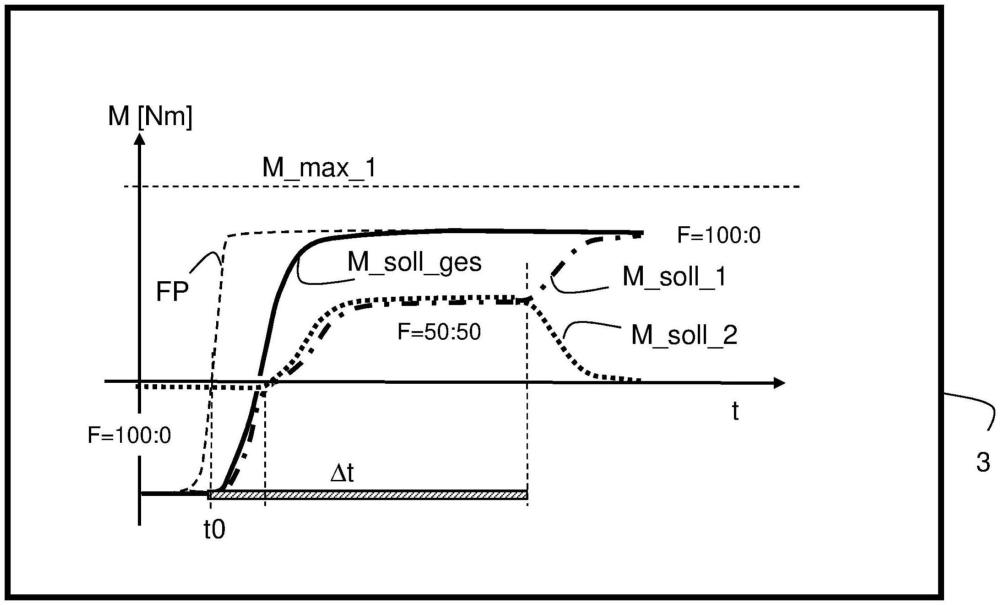
图2示出根据本发明的控制装置的基本构思的曲线图;
图3示出由于去激励次级马达的磁场所引起的问题的曲线图,例如在惯性滑行中;
图4示出图3中所示问题的第一解决方案的曲线图;以及
图5示出针对另一应用领域的图3中所示问题的第二解决方案的曲线图。
具体实施方式
在图1中示出所谓的与道路关联的全轮驱动车辆,所述全轮驱动车辆具有作为初级马达的第一电动机1和作为次级马达的第二电动机2,所述第一电动机作为驱动马达例如作用到后轴上,所述第二电动机作为驱动马达作用到前轴上。初级马达1可以具有自己的机电连接的子控制单元4,并且次级马达2可以具有自己的机电连接的子控制单元5。两个子控制单元4和5与中央电子控制单元3连接。
用于控制电动全轮驱动车辆的方法通过中央电子控制单元3来实施,所述中央电子控制单元具有相应的可编程的功能模块以及具有与所需的传感器、执行器和/或与子控制单元4和5的连接。根据本发明,在控制单元3中包含例如以软件程序(计算机程序产品)的形式的动态功能模块6,在对图2至图5的描述中更详细地探讨所述动态功能模块的设计方案和工作原理。
图2代表性地针对图2至图5示出如下曲线图,在该曲线图的x轴上描绘时间t并且在该曲线图的y轴上描绘力矩M。驾驶员期望以虚线作为加速踏板位置FP表示,连续的线表示由驾驶员期望FP经由加速踏板解释而确定的总额定力矩变化曲线M_soll_ges,点划线表示初级马达1的额定力矩M_soll_1,并且点线表示次级马达2的额定力矩M_soll_2。通过初级马达1最大可调的力矩以M_max_1表示。
根据图2的曲线图起初示出以全轮驱动分配系数F=100:0在负力矩M_soll_1的情况下的惯性滑行运行。力矩M_soll_2为零,因为次级马达2最初是关闭的。
在时刻t0,通过加速踏板位置FP的陡峭的梯度识别出动态的驾驶员期望(急踩油门情况,Tip-in-Situation)。根据本发明的动态功能6以预设时间窗Δt开始。按照本发明,在时间窗Δt之内确定通过新的驾驶员期望FP预设的总额定力矩变化曲线M_soll_ges(高度和梯度),并且借助于预设的轴分配系数F(在此为50:50)通过在两个轴上的两个电动机1和2提供。在此,降低初级马达1的额定力矩M_soll_1并且提高次级马达2的额定力矩M_sill_2。在时间窗Δt结束时再次舒适地关闭次级马达2,初级马达1再次提供通过驾驶员期望FP进一步期望的总额定力矩M_soll_ges。
图3讨论在惯性滑行运行中通过磁场断开AM使得次级马达2脱耦的问题。如果在识别急踩油门的范畴内在此在时间点t1识别到从惯性滑行到牵引的转换,则在能够提高次级马达2的力矩M_soll_2之前,必须从关闭的磁场出发首先(再次)激励磁场。由此,如在图4中所示,在提高次级马达2的额定力矩M_soll_2之前出现延迟时间Δt_v。
在图4中示出的本发明的有利的改进方案中,总额定力矩M_soll_ges的提高总体上延迟了对于激励磁场所需的延迟时间Δt_v。此后,两个电动机1和2的额定力矩M_soll_1和M_soll_2同步提高。
使得总额定力矩M_soll_ges总体上延迟对于激励磁场所需的延迟时间Δt_v的另一应用在如下情况下进行:在负荷提高的情况下(例如在过热或在打滑的情况下)应通过次级马达2支持初级马达1时。该实施例最后在图5中示出。
- 一种用于全轮独立驱动车辆的纵向车速估计方法及其装置
- 一种用于四轮独立驱动车辆的操纵稳定性控制方法
- 用于车辆的控制装置以及用于车辆的控制方法
- 用于控制电动全轮驱动混合动力车辆的运行的系统和方法
- 用于控制电动全轮驱动混合动力车辆的运行的系统和方法