一种四自由度髋关节被动运动康复装置
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及一种运动康复装置,具体涉及一种四自由度髋关节被动运动康复装置,属于运动康复设备技术领域。
背景技术
临床骨科手术中的髋关节置换手术患者日渐增多,术后患者非常需要在短期内给予髋关节运动,使肌肉和神经受刺激运动,从而保持身体血液和营养成分的输送。但是,术后患者在短期内不能自主运动,需要使用被动运动装置给予辅助运动,被动运动装置通过电机等动力源带动人体下肢,使其产生被动跟随运动。
现有技术中,髋关节被动运动康复装置通常仅具有1个自由度或2个自由度,力学系统中的自由度是指运动独立坐标的个数,即现有技术中的髋关节被动运动康复装置仅能部分模拟人体髋关节的运动,其运动方向和运动姿态受限,而无法实现复杂的人体髋关节模拟运动,影响术后患者的髋关节被动运动康复效果。
发明内容
基于以上背景,本发明的目的在于提供一种四自由度髋关节被动运动康复装置,提高对于人体髋关节运动的模拟程度,改善术后患者的髋关节被动运动康复效果。
为了实现上述发明目的,本发明提供以下技术方案:
一种四自由度髋关节被动运动康复装置,包括机体、运动模拟组件和控制组件,所述运动模拟组件设于机体顶部,运动模拟组件包括Z轴电动推杆、Y轴电动推杆、X轴电动推杆、万向连接器和腿固定部件,Z轴电动推杆的固定端连接机体顶部,Z轴电动推杆的伸缩端与Y轴电动推杆的固定端固定连接,Y轴电动推杆的伸缩端与X轴电动推杆的固定端固定连接,X轴电动推杆的伸缩端通过万向连接器连接腿固定部件;腿固定部件包括腿固定支架、旋转电机、齿轮件、齿条件和腿绑带件,腿固定支架与万向连接器连接且能够相对于X轴电动推杆进行旋转运动,旋转电机与腿固定支架固定连接,旋转电机的输出端连接齿轮件,齿轮件与齿条件啮合连接,齿条件与腿固定支架滑动配合,腿绑带件与齿条件固定连接;控制组件分别与Z轴电动推杆、Y轴电动推杆、X轴电动推杆和旋转电机电性连接。
作为优选,所述万向连接器和所述腿固定部件之间还设有陀螺仪姿态传感器,陀螺仪姿态传感器的顶部与万向连接器固定连接,陀螺仪姿态传感器的底部与腿固定支架固定连接,陀螺仪姿态传感器与控制组件电性连接。
作为优选,所述万向连接器包括球基座、旋转球和锁紧件;所述球基座内部设有用于容置旋转球的内腔,内腔侧部开口且与球基座外部连通,球基座与连接腿固定部件顶部固定连接;所述旋转球嵌设于内腔内且能够相对于内腔的腔壁旋转,旋转球与X轴电动推杆的伸缩端固定连接,内腔侧部开口的口径大于X轴电动推杆的伸缩端直径;所述锁紧件与所述球基座邻近内腔侧部开口的部位螺纹连接。
作为优选,所述球基座邻近内腔侧部开口的部位为锥形体,所述锥形体向着远离内腔的方向延伸,锥形体外表面设有螺纹,所述锁紧件中部设有贯穿锁紧件的锥形孔,所述锥形孔的内壁形状匹配于所述锥形体的外壁形状,所述锥形孔的内壁设有螺纹,锥形孔的最小孔径大于X轴电动推杆的伸缩端直径。
作为优选,所述腿固定支架包括电机壳体和弧形底座,所述旋转电机和所述齿轮件设于所述电机壳体内,所述电机壳体底部与弧形底座顶部固定连接,所述弧形底座表面设有用于承托所述齿条件底部的第一滑槽,所述齿条件的形状匹配于所述弧形底座,齿条件的底部与第一滑槽相接且能够相对于第一滑槽滑动,齿条件的顶部设有若干用于啮合连接齿轮件的齿形部。
作为优选,所述机体设有用于连接床体且固定床体与机体相对位置的床体连接组件。
作为优选,所述床体连接组件包括固定夹底座、床体固定夹、固定带和固定螺栓,所述固定夹底座与机体侧部固定连接,固定夹底座设有第二滑槽,所述床体固定夹通过第二滑槽与固定夹底座滑动连接,床体固定夹的一部分内壁与固定夹底座外壁之间具有间距,所述固定带设于床体固定夹上,所述固定螺栓设于床体固定夹上,且固定螺栓的端部能够抵接固定夹底座。
作为优选,所述机体底部设有脚轮,所述脚轮设有锁定部件。脚轮提高机体的移动便携性。
作为优选,所述控制组件包括电性连接的微电脑控制处理器、人机交互部件和显示部件,微电脑控制处理器设于机体内部,人机交互部件和显示部件设于机体顶部,微电脑控制处理器分别与Z轴电动推杆、Y轴电动推杆、X轴电动推杆和旋转电机电性连接。
作为优选,所述控制组件还包括应急开关,所述应急开关与所述微电脑控制处理器电性连接,应急开关设于机体顶部。在紧急情况下,通过操作应急开关能够快速切断微电脑控制处理器及其对Z轴电动推杆、Y轴电动推杆、X轴电动推杆和旋转电机的供电,实现紧急停机。
与现有技术相比,本发明具有以下优点:
本发明的一种四自由度髋关节被动运动康复装置,通过Z轴电动推杆、Y轴电动推杆、X轴电动推杆、万向连接器和腿固定部件的协同配合,施加四自由度的运动于患者,提高对于人体髋关节运动的模拟程度,较好的模拟人体正常的髋关节运动姿态,从而改善术后患者的髋关节被动运动康复效果。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
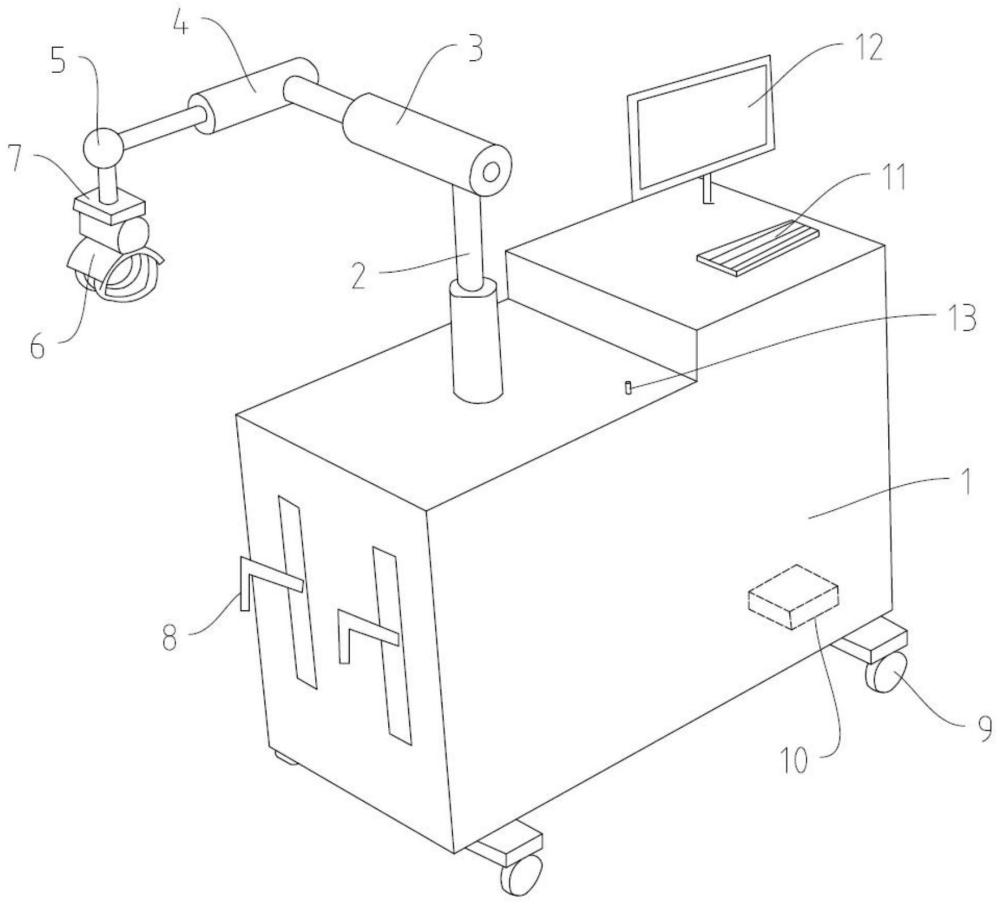
图1是本发明一种四自由度髋关节被动运动康复装置的立体结构示意图;
图2是本发明中万向连接器的内部结构示意图;
图3是本发明中腿固定部件的立体结构示意图;
图4是本发明中床体连接组件的爆炸结构示意图;
图5是本发明一种四自由度髋关节被动运动康复装置的Z轴、Y轴和G轴运动示意图;
图6是本发明一种四自由度髋关节被动运动康复装置的Y轴、X轴和G轴运动示意图。
图中:1、机体;2、Z轴电动推杆;3、Y轴电动推杆;4、X轴电动推杆;5、万向连接器;6、腿固定部件;7、陀螺仪姿态传感器;8、床体连接组件;9、脚轮;10、微电脑控制处理器;11、人机交互部件;12、显示部件;13、应急开关;501、球基座;502、旋转球;503、锁紧件;504、锥形体;505、锥形孔;601、电机壳体;602、弧形底座;603、旋转电机;604、齿轮件;605、齿条件;606、腿绑带件;801、固定夹底座;802、床体固定夹;803、固定带;804、固定螺栓。
具体实施方式
下面通过具体实施例,并结合附图,对本发明的技术方案作进一步的具体说明。应当理解,本发明的实施并不局限于下面的实施例,对本发明所做的任何形式上的变通和/或改变都将落入本发明保护范围。
在本发明中,若非特指,所有的份、百分比均为重量单位,所采用的设备和原料等均可从市场购得或是本领域常用的。下述实施例中的方法,如无特别说明,均为本领域的常规方法。下述实施例中的部件或设备如无特别说明,均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
以下结合附图对本发明的实施例做出详细说明,在下面的详细说明中,为便于解释,阐述了许多具体的细节以提供对本发明的实施例的全面理解。然而,一个或多个实施例在没有这些具体细节的情况下也可以被本领域技术人员所实施。
如图1所示,本发明的实施例公开了一种四自由度髋关节被动运动康复装置,包括机体1、运动模拟组件和控制组件。
运动模拟组件设于机体1顶部,运动模拟组件包括Z轴电动推杆2、Y轴电动推杆3、X轴电动推杆4、万向连接器5和腿固定部件6,Z轴电动推杆2、Y轴电动推杆3、X轴电动推杆4分别和控制组件电性连接。Z轴电动推杆2的固定端连接机体1顶部,Z轴电动推杆2的伸缩端与Y轴电动推杆3的固定端固定连接,Y轴电动推杆3的伸缩端与X轴电动推杆4的固定端固定连接,X轴电动推杆4的伸缩端通过万向连接器5连接腿固定部件6。
万向连接器5和腿固定部件6之间还设有陀螺仪姿态传感器7,陀螺仪姿态传感器7的顶部与万向连接器5固定连接,陀螺仪姿态传感器7的底部与腿固定支架固定连接,陀螺仪姿态传感器7与控制组件电性连接。陀螺仪姿态传感器7可采用9轴AHRS、MEMS等姿态传感器,其支持ROS1/ROS2,并支持STM2解算代码,并提供C/C++的数据协议,包括ModBus协议和卡尔曼滤波技术。陀螺仪姿态传感器7用于传递腿固定部件6的运动姿态信号给控制组件,从而使控制组件根据运动姿态信号对Z轴电动推杆2、Y轴电动推杆3、X轴电动推杆4以及后述的旋转电机603做出相应控制。
如图2所示,万向连接器5包括球基座501、旋转球502和锁紧件503。球基座501内部设有用于容置旋转球502的内腔,内腔侧部开口且与球基座501外部连通,球基座501与连接腿固定部件6顶部固定连接。旋转球502嵌设于内腔内且能够相对于内腔的腔壁旋转,旋转球502与X轴电动推杆4的伸缩端固定连接,内腔侧部开口的口径大于X轴电动推杆4的伸缩端直径。锁紧件503与球基座501邻近内腔侧部开口的部位螺纹连接。
为了便于通过锁紧件503调节球基座501内腔的腔壁对于旋转球502的接触摩擦力,从而使旋转球502相对于球基座501旋转时具有一定的锁紧力,球基座501邻近内腔侧部开口的部位为锥形体504,锥形体504向着远离内腔的方向延伸,锥形体504外表面设有螺纹,锁紧件503中部设有贯穿锁紧件503的锥形孔505,锥形孔505的内壁形状匹配于锥形体504的外壁形状,锥形孔505的内壁设有螺纹,锥形孔505的最小孔径大于X轴电动推杆4的伸缩端直径。本实施例中,锁紧件503与锥形体504的连接位置设置,使得旋转球502相对于球基座501的旋转角度达到水平平面和垂直平面各为±20°。
如图3所示,腿固定部件6包括腿固定支架、旋转电机603、齿轮件604、齿条件605和腿绑带件606,腿固定支架与万向连接器5连接且能够相对于X轴电动推杆4进行旋转运动,旋转电机603与腿固定支架固定连接,旋转电机603的输出端连接齿轮件604。齿轮件604与齿条件605啮合连接,齿条件605与腿固定支架滑动配合,腿绑带件606与齿条件605固定连接。旋转电机603与控制组件电性连接。腿绑带件606由柔性纺织材料或皮革材料制成,表面设置能够相互粘合的毛扣和刺扣,从而固定术后患者下肢肢体。
具体地,腿固定支架包括电机壳体601和弧形底座602,旋转电机603和齿轮件604设于电机壳体601内,电机壳体601底部与弧形底座602顶部固定连接,弧形底座602表面设有用于承托齿条件605底部的第一滑槽,齿条件605的形状匹配于弧形底座602,齿条件605的底部与第一滑槽相接且能够相对于第一滑槽滑动,齿条件605的顶部设有多个用于啮合连接齿轮件604的齿形部。
本实施例中,机体1设有用于连接床体且固定床体与机体1相对位置的床体连接组件8。
具体地,如图4所示,床体连接组件8包括固定夹底座801、床体固定夹802、固定带803和固定螺栓804,固定夹底座801与机体1侧部固定连接,固定夹底座801设有第二滑槽,床体固定夹802通过第二滑槽与固定夹底座801滑动连接,床体固定夹802的一部分内壁与固定夹底座801外壁之间具有间距,固定带803设于床体固定夹802上,固定螺栓804设于床体固定夹802上,且固定螺栓804的端部能够抵接固定夹底座801。
将机体1与术后患者所在的床体固定时,旋松固定螺栓804,滑动床体固定夹802,从而调节床体固定夹802相对于固定夹底座801的高度,达到匹配床体的适当高度时,床体固定夹802将床体的一部分夹持在床体固定夹802内壁与固定夹底座801外壁之间,旋紧固定螺栓804,锁定床体固定夹802与固定夹底座801的相对位置,为进一步保证固定性,还可将固定带803绕过床体固定夹802底座801系紧,使机体1与床体的相对位置更为稳定。
本实施例中,机体1底部设有脚轮9,脚轮9设有锁定部件,脚轮9提高机体1的移动便携性,锁定部件的作用为在机体1达到指定位置时将脚轮9锁定,使其无法滚动。具有锁定部件的脚轮9属于现有技术,具体结构不再赘述。
本实施例中,控制组件包括电性连接的微电脑控制处理器10、人机交互部件11和显示部件12,微电脑控制处理器10设于机体1内部,人机交互部件11和显示部件12设于机体1顶部,本实施例中,人机交互部件11为键盘,显示部件12为显示器,微电脑控制处理器10分别与Z轴电动推杆2、Y轴电动推杆3、X轴电动推杆4和旋转电机603电性连接。为了提高使用安全性,控制组件还包括应急开关13,应急开关13与微电脑控制处理器10电性连接,应急开关13设于机体1顶部。在紧急情况下,通过操作应急开关13能够快速切断微电脑控制处理器10及其对Z轴电动推杆2、Y轴电动推杆3、X轴电动推杆4和旋转电机603的供电,实现紧急停机。
该四自由度髋关节被动运动康复装置的工作原理为,通过Z轴电动推杆2、Y轴电动推杆3和X轴电动推杆4的直线伸缩运动,分别实现位于X轴电动推杆4伸缩端的腿固定部件6固定的患者下肢肢体的三个自由度的运动,即如图5所示的z轴、y轴以及图6所示的x轴运动,通过旋转电机603旋转带动齿条件605相对于齿轮件604的运动,实现患者下肢肢体的一个自由度的摆动运动,即图6所示的G轴运动,万向连接器5还支持腿固定部件6相对于X轴电动推杆4伸缩端的旋转运动,即图5所示的G轴运动,最终实现患者下肢肢体的四自由度运动,运动过程中,陀螺仪姿态传感器7传递腿固定部件6的运动姿态信号给控制组件,从而使控制组件根据运动姿态信号对Z轴电动推杆2、Y轴电动推杆3、X轴电动推杆4以及旋转电机603做出相应控制。
该四自由度髋关节被动运动康复装置提高对于人体髋关节运动的模拟程度,较好的模拟人体正常的髋关节运动姿态,从而改善术后患者的髋关节被动运动康复效果。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
- 一种四自由度叉车门架试验倾斜缸模拟装置
- 一种可穿戴三自由度的髋关节康复装置
- 一种四自由度的肘腕关节康复训练装置