一种用于不规则金属工件的智能打磨机器人
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及一种用于不规则金属工件的智能打磨机器人。
背景技术
机器人是自动控制机器的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械,在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作。
打磨机器人是用于对工件表面进行磨光的装置,现有的打磨机器人对于工件的夹持一般采用刚性夹持,容易划花工件表面,甚至造成工件的弯折,对工件造成损坏,且现有的打磨机器人使用的磨块一般是固定不动,对于管状、板状等规则型金属工件具有较好打磨效果,而当工件表面凹凸不平时,磨块则无法充分的贴紧工件,造成打磨效果一般,因此市场上出现了针对不规则工件的打磨装置,而现有的打磨机器人在使用时,传送机构和打磨机构需要多个输出端,能源消耗较大。
发明内容
本发明要解决的技术问题是:为了克服现有技术的不足,提供一种用于不规则金属工件的智能打磨机器人。
本发明解决其技术问题所采用的技术方案是:一种用于不规则金属工件的智能打磨机器人,包括支杆、底座、传送机构、夹持机构和打磨机构,所述支杆有两个,两个支杆分别设置在底座的两端,所述传送机构设置在底座上,所述夹持机构设置在底座的一端,所述打磨机构设置在底座上,所述打磨机构位于夹持机构下方;
所述传送机构包括驱动组件和传送组件,所述驱动组件包括电机和驱动轴,所述电机水平设置在支杆上,所述驱动轴安装在电机上,所述传送组件包括连动单元和传送单元,所述传送单元有两个,两个传送单元分别设置在底座的两端,所述传送单元包括传送轮和转轴,所述转轴设置在底座上,所述转轴穿过底座,所述传送轮有两个,两个传送轮分别设置在转轴的两端,两个传送轮均与转轴键连接,位于底座同侧的两个转轮通过传送带传动连接,所述连动单元包括两个转轮,两个转轮分别套设在驱动轴和转轴上,两个转轮分别与驱动轴和转轴键连接,两个转轮通过皮带传动连接;
所述夹持机构包括压板、压杆和第一弹簧,所述压板设置在底座上方,所述压杆有两个,两个压杆分别设置在压板的两端,所述压杆穿过底座,所述压杆与底座滑动连接,所述第一弹簧套设在压杆上,所述第一弹簧位于压板和底座之间,所述第一弹簧的另一端与底座连接,所述第一弹簧的另一端与压板连接;
所述打磨机构包括限位组件、传动组件和打磨组件,所述限位组件包括限位杆、限位块、限位轴和第二弹簧,所述限位杆设置在底座上,所述限位杆上设有限位槽,所述限位块位于限位槽内,所述限位块与限位槽滑动连接,所述第二弹簧设置在限位槽内,所述第二弹簧的一端与限位槽连接,所述第二弹簧的另一端与限位块连接,所述限位轴设置在限位块上,所述传动组件包括两个传动轮,两个传动轮分别套设在驱动轴和限位轴上,两个传动轮分别与驱动轴和限位轴键连接,两个传动轮通过皮带传动连接,所述底座上设有凹口,所述打磨组件位于凹口处,所述打磨组件有若干,各打磨组件均设置在限位轴上,相邻的两个打磨组件相互抵靠,所述打磨组件包括套环和打磨单元,所述套环套设在限位轴上,所述套环与限位轴键连接,所述打磨单元有四个,相邻的两个打磨单元形成的夹角为90°,所述打磨单元包括套管、推杆、第三弹簧和磨块,所述套管设置在套环上,所述推杆的一端位于套管内,所述推杆的另一端伸出套管外,所述推杆与套管滑动连接,所述第三弹簧设置在套管内,所述第三弹簧的另一端与套管连接,所诉第三弹簧的另一端与推杆连接,所述磨块设置在推杆位于套管外的一端,所述磨块的截面位于弧形,所述磨块的弧形截面的圆心位于限位轴的轴线上。
为了实现更好的传送效果,所述底座上方设有推动单元,所述推动单元包括气缸和推板,所述气缸水平设置在底座远离压板的一端,所述推板设置在气缸的气杆上,所述推板与底座滑动连接。
为了实现自动智能化运行,所述压板上设有距离传感器,所述距离传感器位于压板靠近气缸的一侧,所述底座上设有PLC,所述电机、气缸和距离传感器均与PLC电连接。
为了对限位块的移动进行更好的限位,所述限位块上设有定位块,所述限位槽内设有定位槽,所述定位块位于定位槽内,所述定位块与定位槽滑动连接。
为了对限位块的移动进行更好的限位,所述定位块有两个,两个定位块分别设置在限位块的两侧,所述定位槽有两个,两个定位块分别位于两个定位槽内。
为了对推杆的移动进行更好的限位,所述套管内设有卡块,所述推杆上设有卡槽,所述卡块位于卡槽内,所述卡块与卡槽滑动连接。
为了对推杆的移动进行更好的限位,所述卡块有两个,两个卡块分别设置在套管的两侧,所述卡槽有两个,两个卡块分别位于两个卡槽内。
为了对推杆的移动进行更好的限位,所述卡块的截面为燕尾型,所述卡槽为燕尾槽。
为了实现更好的打磨效果,所述第二弹簧处于压缩状态。
为了减小摩擦,所述压板上设有若干滚轮,各滚轮均匀设置。
本发明的有益效果是,该用于不规则金属工件的智能打磨机器人,通过传送机构实现工件的传送,通过夹持机构实现工件的夹持,通过打磨机构实现工件的打磨,与现有的夹持机构相比,该夹持机构采用柔性夹持,避免了刚性夹持划花工件表面,对工件实现保护,与现有的打磨机构相比,该打磨机构将工件表面分割为若干部分,使得各磨块均能贴紧工件,从而对不规则的工件实现了打磨,提高了实用性,与现有的打磨机器人相比,该装置通过一个输出端实现传送机构和打磨机构的运行,节省了能源,且该联动采用纯机械结构,提高了稳定性和使用寿命。
附图说明
下面结合附图和实施例对本发明进一步说明。
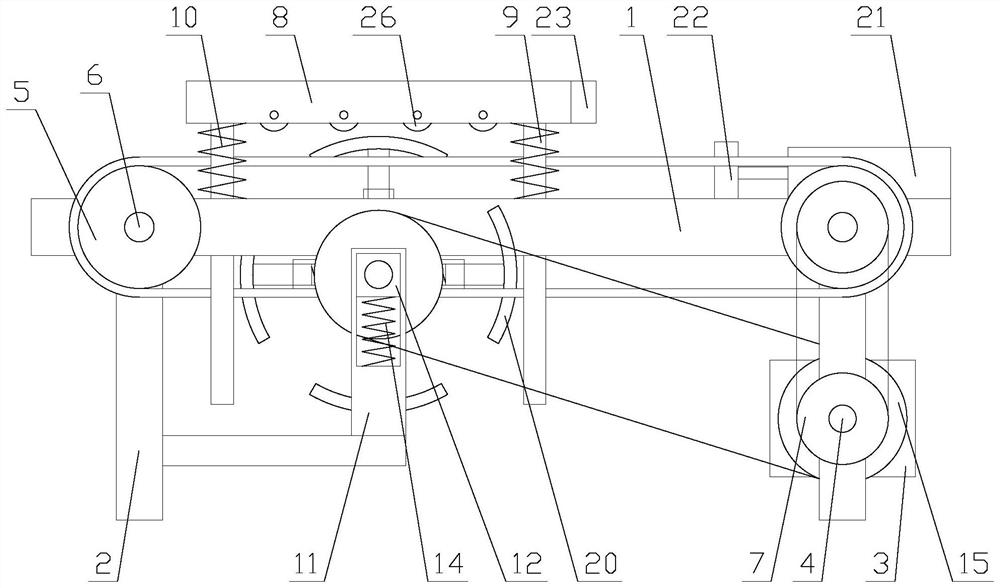
图1是本发明的用于不规则金属工件的智能打磨机器人的结构示意图;
图2是本发明的用于不规则金属工件的智能打磨机器人的传送机构的结构示意图;
图3是本发明的用于不规则金属工件的智能打磨机器人的夹持机构的结构示意图;
图4是本发明的用于不规则金属工件的智能打磨机器人的打磨组件的结构示意图;
图5是本发明的用于不规则金属工件的智能打磨机器人的限位块与限位杆的连接结构示意图;
图6是本发明的用于不规则金属工件的智能打磨机器人的推杆与套管的连接结构示意图;
图中:1.支杆,2.底座,3.电机,4.驱动轴,5.传送轮,6.转轴,7.转轮,8.压板,9.压杆,10.第一弹簧,11.限位杆,12.限位块,13.限位轴,14.第二弹簧,15.传动轮,16.套环,17.套管,18.推杆,19.第三弹簧,20.磨块,21.气缸,22.推板,23.距离传感器,24.定位块,25.卡块,26.滚轮。
具体实施方式
现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
如图1所示,一种用于不规则金属工件的智能打磨机器人,包括支杆1、底座2、传送机构、夹持机构和打磨机构,所述支杆1有两个,两个支杆1分别设置在底座2的两端,所述传送机构设置在底座2上,所述夹持机构设置在底座2的一端,所述打磨机构设置在底座2上,所述打磨机构位于夹持机构下方;
该装置使用时,将工件放置在传送机构上,通过传送机构实现工件的传送,通过夹持机构实现工件的夹持,通过打磨机构实现工件的打磨。
如图2所示,所述传送机构包括驱动组件和传送组件,所述驱动组件包括电机3和驱动轴4,所述电机3水平设置在支杆1上,所述驱动轴4安装在电机3上,所述传送组件包括连动单元和传送单元,所述传送单元有两个,两个传送单元分别设置在底座2的两端,所述传送单元包括传送轮5和转轴6,所述转轴6设置在底座2上,所述转轴6穿过底座2,所述传送轮5有两个,两个传送轮5分别设置在转轴6的两端,两个传送轮5均与转轴6键连接,位于底座2同侧的两个转轮7通过传送带传动连接,所述连动单元包括两个转轮7,两个转轮7分别套设在驱动轴4和转轴6上,两个转轮7分别与驱动轴4和转轴6键连接,两个转轮7通过皮带传动连接;
运行电机3,电机3驱动驱动轴4旋转,驱动轴4驱动与之连接的转轮7旋转,该转轮7通过皮带驱动另一个转轮7旋转,另一个转轮7驱动与之连接的转轴6旋转,该转轴6驱动与之连接的传送轮5旋转,从而在摩擦力的作用下,两个传送轮5驱动传送带移动,从而实现工件的传送。
如图3所示,所述夹持机构包括压板8、压杆9和第一弹簧10,所述压板8设置在底座2上方,所述压杆9有两个,两个压杆9分别设置在压板8的两端,所述压杆9穿过底座2,所述压杆9与底座2滑动连接,所述第一弹簧10套设在压杆9上,所述第一弹簧10位于压板8和底座2之间,所述第一弹簧10的另一端与底座2连接,所述第一弹簧10的另一端与压板8连接;
运行距离传感器23,距离传感器23内的红外线发射器发射出红外线,当工件移动至夹持机构处时,工件反射红外线,被距离传感器23内的红外线接收器接收,从而距离传感器23向PLC发送电信号,从而使得PLC控制气缸21运行,气缸21的气杆伸出,驱动推板22移动,推板22推动工件移动,使得工件卡入底座2和压板8之间,此时压板8向上移动,使得第一弹簧10被拉伸,第一弹簧10的回复力对压板8产生拉力,从而使得压板8向下移动,从而贴紧工件,对工件进行夹持,这里压板8移动驱动压杆9移动,压杆9穿过底座2,从而对压杆9的移动进行限位,从而对压板8的移动进行更好的限位。
为了实现更好的传送效果,所述底座2上方设有推动单元,所述推动单元包括气缸21和推板22,所述气缸21水平设置在底座2远离压板8的一端,所述推板22设置在气缸21的气杆上,所述推板22与底座2滑动连接。
为了实现自动智能化运行,所述压板8上设有距离传感器23,所述距离传感器23位于压板8靠近气缸21的一侧,所述底座2上设有PLC,所述电机3、气缸21和距离传感器23均与PLC电连接。
为了减小摩擦,所述压板8上设有若干滚轮26,各滚轮26均匀设置。
如图4-6所示,所述打磨机构包括限位组件、传动组件和打磨组件,所述限位组件包括限位杆11、限位块12、限位轴13和第二弹簧14,所述限位杆11设置在底座2上,所述限位杆11上设有限位槽,所述限位块12位于限位槽内,所述限位块12与限位槽滑动连接,所述第二弹簧14设置在限位槽内,所述第二弹簧14的一端与限位槽连接,所述第二弹簧14的另一端与限位块12连接,所述限位轴13设置在限位块12上,所述传动组件包括两个传动轮15,两个传动轮15分别套设在驱动轴4和限位轴13上,两个传动轮15分别与驱动轴4和限位轴13键连接,两个传动轮15通过皮带传动连接,所述底座2上设有凹口,所述打磨组件位于凹口处,所述打磨组件有若干,各打磨组件均设置在限位轴13上,相邻的两个打磨组件相互抵靠,所述打磨组件包括套环16和打磨单元,所述套环16套设在限位轴13上,所述套环16与限位轴13键连接,所述打磨单元有四个,相邻的两个打磨单元形成的夹角为90°,所述打磨单元包括套管17、推杆18、第三弹簧19和磨块20,所述套管17设置在套环16上,所述推杆18的一端位于套管17内,所述推杆18的另一端伸出套管17外,所述推杆18与套管17滑动连接,所述第三弹簧19设置在套管17内,所述第三弹簧19的另一端与套管17连接,所诉第三弹簧19的另一端与推杆18连接,所述磨块20设置在推杆18位于套管17外的一端,所述磨块20的截面位于弧形,所述磨块20的弧形截面的圆心位于限位轴13的轴线上。
当工件移动至磨块20处时,工件就会将磨块20向下压动,磨块20驱动推杆18向下移动,推杆18压缩第三弹簧19,第三弹簧19的回复力对推杆18产生向外的推力,从而对磨块20产生向外的推力,从而使得各磨块20贴紧工件的表面。
驱动轴4旋转驱动与之连接的传动轮15,该传动轮15通过皮带驱动另一个传动轮15旋转,另一个传动轮15驱动限位轴13旋转,限位轴13驱动套环16旋转,套环16驱动套管17旋转,套管17驱动推杆18旋转,推杆18驱动磨块20旋转,从而使得磨块20对工件进行打磨,随着工件的移动,磨块20即可对整个工件完成打磨。
这里第二弹簧14处于压缩状态,第二弹簧14的回复力对限位块12产生向上的推力,限位块12对限位轴13产生向上的推力,限位轴13对套管17产生向上的推力,套管17对推杆18产生向上的推力,推杆18对磨块20产生向上的推力,从而使得各磨块20更好的贴紧工件的表面。
这里限位块12移动驱动定位块24移动,定位块24位于定位槽内,从而使得定位块24只能沿着定位槽的轴线方向移动,从而对定位块24的移动进行限位。
这里卡块25位于燕尾槽内,从而使得卡块25只能沿着燕尾槽的轴线方向移动,从而对卡块25的移动进行限位,从而对推杆18的移动进行更好的限位。
这里工件表面在凹凸不平的情况下,各磨块20都能在第三弹簧19的推力作用下,始终贴紧工件,从而对不规则的工件均进行较好的打磨效果。
为了对限位块12的移动进行更好的限位,所述限位块12上设有定位块24,所述限位槽内设有定位槽,所述定位块24位于定位槽内,所述定位块24与定位槽滑动连接。
为了对限位块12的移动进行更好的限位,所述定位块24有两个,两个定位块24分别设置在限位块12的两侧,所述定位槽有两个,两个定位块24分别位于两个定位槽内。
为了对推杆18的移动进行更好的限位,所述套管17内设有卡块25,所述推杆18上设有卡槽,所述卡块25位于卡槽内,所述卡块25与卡槽滑动连接。
为了对推杆18的移动进行更好的限位,所述卡块25有两个,两个卡块25分别设置在套管17的两侧,所述卡槽有两个,两个卡块25分别位于两个卡槽内。
为了对推杆18的移动进行更好的限位,所述卡块25的截面为燕尾型,所述卡槽为燕尾槽。
为了实现更好的打磨效果,所述第二弹簧14处于压缩状态。
该装置使用时,通过驱动组件驱动连动单元旋转,连动单元驱动传送单元旋转,从而实现工件的传送,通过推动单元将工件推动至夹持机构内,通过夹持机构实现对工件的夹紧,通过打磨组件使得磨块20贴紧工件的表面,通过限位组件使得磨块20更好的贴紧工件表面,实现更好的打磨效果,通过驱动组件驱动传动组件旋转,传动组件驱动限位轴13旋转,限位轴13驱动打磨组件旋转,从而实现对工件表面的打磨,通过PLC实现自动智能化运行,避免了人工打磨,提高了打磨效率。
与现有技术相比,该用于不规则金属工件的智能打磨机器人,通过传送机构实现工件的传送,通过夹持机构实现工件的夹持,通过打磨机构实现工件的打磨,与现有的夹持机构相比,该夹持机构采用柔性夹持,避免了刚性夹持划花工件表面,对工件实现保护,与现有的打磨机构相比,该打磨机构将工件表面分割为若干部分,使得各磨块20均能贴紧工件,从而对不规则的工件实现了打磨,提高了实用性,与现有的打磨机器人相比,该装置通过一个输出端实现传送机构和打磨机构的运行,节省了能源,且该联动采用纯机械结构,提高了稳定性和使用寿命。
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
- 一种用于不规则金属工件的智能打磨机器人
- 一种用于不规则金属工件的切割装置