一种水下外管道组合变径巡检机器人
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及智能机器人技术领域,尤其涉及一种水下外管道组合变径巡检机器人。
背景技术
随着管道机器人技术的成熟,在对石油管道或者城市排水管道的缺陷检测会使用到管道机器人,使用管道机器人对管道孔内进行巡检。
但采用上述方式,采用内管道巡检机器人对管道进行缺陷检测时,需要关停石油管道并对内腔附着油污进行清洗后,采用管道机器人相机检测,费时费力且效率低下。
发明内容
本发明的目的在于提供一种水下外管道组合变径巡检机器人,旨在解决现有管道巡检机器人,采用内管道巡检机器人对管道进行缺陷检测时,需要关停石油管道并对内腔附着油污进行清洗后,采用管道机器人相机检测,费时费力且效率低下的问题。
为实现上述目的,本发明提供了一种水下外管道组合变径巡检机器人,包括四个巡检装置和八个电动伸缩机构,
每相邻两个所述巡检装置之间镜像设置有两个所述电动伸缩机构;所述巡检装置包括巡检机壳、透明封盖、控制机构、两个电源件、传感设备和两个推进机构,所述透明封盖与所述巡检机壳固定连接,并位于所述巡检机壳一侧;所述控制机构设置于所述巡检机壳内部;两个所述电源件分别设置于所述巡检机壳内部;所述传感设备设置于所述巡检机壳一侧;两个所述推进机构分别设置于所述巡检机壳两侧。
其中,所述控制机构包括超磁安装板和树莓派主控板,所述超磁安装板与所述巡检机壳固定连接,并位于所述巡检机壳内部;所述树莓派主控板固定设置于所述超磁安装板一侧。
其中,所述电源件包括电池放置箱和电池,所述电池放置箱与所述巡检机壳固定连接,并位于所述巡检机壳内部;所述电池设置于所述电池放置箱内部。
其中,所述传感设备包括夜视摄像头、两个补光灯和体感深度相机,所述夜视摄像头与所述巡检机壳固定连接,并位于所述巡检机壳一侧;两个所述补光灯分别与所述夜视摄像头固定连接,并分别位于所述夜视摄像头两侧;所述体感深度相机与所述透明封盖固定连接,并位于所述透明封盖一侧。
其中,所述推进机构包括安装架和封装推进器,所述安装架与所述巡检机壳固定连接,并位于所述巡检机壳一侧;所述封装推进器与所述安装架固定连接,并位于所述安装架一侧。
其中,所述电动伸缩机构包括定杆超级磁铁、电动伸缩定杆和电动伸缩动杆,所述定杆超级磁铁与所述巡检机壳固定连接,并位于所述巡检机壳一侧;所述电动伸缩定杆与所述定杆超级磁铁固定连接,并位于所述定杆超级磁铁一侧;所述电动伸缩动杆设置于所述电动伸缩定杆输出端一侧。
其中,所述推进机构还包括过滤件,所述过滤件设置于所述封装推进器一侧。
其中,所述过滤件包括固定环、过滤罩、过滤挡板和过滤网,所述固定环与所述封装推进器固定连接,并位于所述封装推进器一侧;所述过滤罩与所述固定环固定连接,且与所述封装推进器固定连接,并位于所述固定环一侧;所述过滤挡板与所述过滤罩固定连接,并位于所述过滤罩一侧;所述过滤网与所述过滤罩固定连接,并位于所述过滤罩内侧。
本发明的一种水下外管道组合变径巡检机器人,四个所述巡检装置通过八个所述电动伸缩机构实现扩张和收缩,所述巡检机壳配合所述透明封盖形成大致形状,所述巡检机壳为扁平弧形减少水流阻力便于水下作业,所述控制机构用于驱动整体装置的运作并接收远程指令控制指定的电气元件,所述电源件用于给各项电气元件提供电能,所述传感设备通过所述控制机构的控制将管道检查情况通过云端传输给指定接收设备上,所述推进机构用于驱动整体装置移动,四个所述巡检装置通过磁性定位配合所述电动伸缩机构改变整体装置的半径达到变径的效果,通过每个连接处镜像设置两组所述电动伸缩机构达到伸缩和扩展平稳,使用对管道外侧检测的方式解决采用内管道巡检机器人对管道进行缺陷检测时,需要关停石油管道并对内腔附着油污进行清洗后,采用管道机器人相机检测,费时费力且效率低下的问题。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
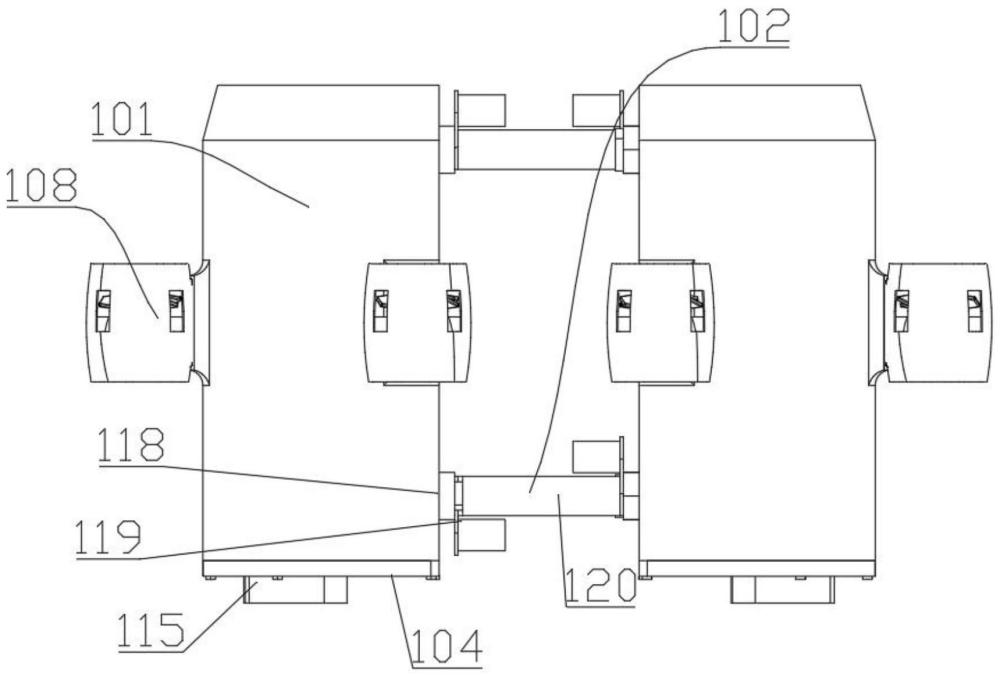
图1是本发明第一实施例的整体的正视图。
图2是本发明第一实施例的整体的侧视图。
图3是本发明第一实施例的巡检装置结构示意图。
图4是本发明第一实施例的巡检装置内部结构示意图。
图5是本发明第一实施例的巡检装置侧视图示意图。
图6是本发明第二实施例的巡检装置侧视图示意图。
101-巡检装置、102-电动伸缩机构、103-巡检机壳、104-透明封盖、105-控制机构、106-电源件、107-传感设备、108-推进机构、109-超磁安装板、110-树莓派主控板、111-电池放置箱、112-电池、113-夜视摄像头、114-补光灯、115-体感深度相机、116-安装架、117-封装推进器、118-定杆超级磁铁、119-电动伸缩定杆、120-电动伸缩动杆、201-过滤件、202-固定环、203-过滤罩、204-过滤挡板、205-过滤网。
具体实施方式
本申请第一实施例为:
请参阅图1-图5,其中,图1是本发明第一实施例的整体的正视图,图2是本发明第一实施例的整体的侧视图,图3是本发明第一实施例的巡检装置结构示意图,图4是本发明第一实施例的巡检装置内部结构示意图,图5是本发明第一实施例的巡检装置侧视图示意图。
本发明的一种水下外管道组合变径巡检机器人,包括四个巡检装置101和八个电动伸缩机构102,所述巡检装置101包括巡检机壳103、透明封盖104、控制机构105、两个电源件106、传感设备107和两个推进机构108,所述控制机构105包括超磁安装板109和树莓派主控板110,所述电源件106包括电池放置箱111和电池112,所述传感设备107包括夜视摄像头113、两个补光灯114和体感深度相机115,所述推进机构包括安装架116和封装推进器117,所述电动伸缩机构102包括定杆超级磁铁118、电动伸缩定杆119和电动伸缩动杆120,通过前述方案解决了现有管道巡检机器人,采用内管道巡检机器人对管道进行缺陷检测时,需要关停石油管道并对内腔附着油污进行清洗后,采用管道机器人相机检测,费时费力且效率低下的问题。
其中,每相邻两个所述巡检装置101之间镜像设置有两个所述电动伸缩机构102;所述透明封盖104与所述巡检机壳103固定连接,并位于所述巡检机壳103一侧;所述控制机构105设置于所述巡检机壳103内部;两个所述电源件106分别设置于所述巡检机壳103内部;所述传感设备107设置于所述巡检机壳103一侧;两个所述推进机构108分别设置于所述巡检机壳103两侧,四个所述巡检装置101通过八个所述电动伸缩机构102实现扩张和收缩,所述巡检机壳103配合所述透明封盖104形成大致形状,所述巡检机壳103为扁平弧形减少水流阻力便于水下作业,所述控制机构105用于驱动整体装置的运作并接收远程指令控制指定的电气元件,所述电源件106用于给各项电气元件提供电能,所述传感设备107通过所述控制机构105的控制将管道检查情况通过云端传输给指定接收设备上,所述推进机构108用于驱动整体装置移动,四个所述巡检装置101通过磁性定位配合所述电动伸缩机构102改变整体装置的半径达到变径的效果,通过每个连接处镜像设置两组所述电动伸缩机构102达到伸缩和扩展平稳,使用对管道外侧检测的方式解决采用内管道巡检机器人对管道进行缺陷检测时,需要关停石油管道并对内腔附着油污进行清洗后,采用管道机器人相机检测,费时费力且效率低下的问题。
其次,所述超磁安装板109与所述巡检机壳103固定连接,并位于所述巡检机壳103内部;所述树莓派主控板110固定设置于所述超磁安装板109一侧,所述超磁安装板109磁性定位安装于所述巡检机壳103内部,所述树莓派主控板110通过螺钉固定于所述超磁安装板109上用于接收远程设备传输来的指令控制整体装置内的各个电气元件。
再次,所述电池放置箱111与所述巡检机壳103固定连接,并位于所述巡检机壳103内部;所述电池112设置于所述电池放置箱111内部,所述电池放置箱111通过强磁定位安装于所述巡检机壳103内部,所述电池放置箱111为密封防水结构用于所述电池112的放置,所述电池112用于给整体装置进行能源供给。
另外,所述夜视摄像头113与所述巡检机壳103固定连接,并位于所述巡检机壳103一侧;两个所述补光灯114分别与所述夜视摄像头113固定连接,并分别位于所述夜视摄像头113两侧;所述体感深度相机115与所述透明封盖104固定连接,并位于所述透明封盖104一侧,所述夜视摄像头113用于将外部管道检查影像传给所述树莓派主控板110中进行影像处理,所述补光灯114用于进行视觉补光效果增加所述夜视摄像头113的录像效果,所述体感深度相机115用于判断前方行径路况。
再者,所述安装架116与所述巡检机壳103固定连接,并位于所述巡检机壳103一侧;所述封装推进器117与所述安装架116固定连接,并位于所述安装架116一侧,所述安装架116设置于所述巡检机壳103上用于支撑所述封装推进器117的安装,通过所述封装推进器117推动整体装置进行移动。
最后,所述定杆超级磁铁118与所述巡检机壳103固定连接,并位于所述巡检机壳103一侧;所述电动伸缩定杆119与所述定杆超级磁铁118固定连接,并位于所述定杆超级磁铁118一侧;所述电动伸缩动杆120设置于所述电动伸缩定杆119输出端一侧,所述定杆超级磁铁118用于将所述电动伸缩定杆119磁吸安装至所述巡检机壳103上,配合所述电动伸缩动杆120控制两侧的所述巡检机壳103相互靠近或者远离。
在使用本发明所述的一种水下外管道组合变径巡检机器人,四个所述巡检装置101通过八个所述电动伸缩机构102实现扩张和收缩,所述巡检机壳103配合所述透明封盖104形成大致形状,所述巡检机壳103为扁平弧形减少水流阻力便于水下作业,所述超磁安装板109磁性定位安装于所述巡检机壳103内部,所述树莓派主控板110通过螺钉固定于所述超磁安装板109上用于接收远程设备传输来的指令控制整体装置内的各个电气元件,所述电池放置箱111通过强磁定位安装于所述巡检机壳103内部,所述电池放置箱111为密封防水结构用于所述电池112的放置,所述电池112用于给整体装置进行能源供给,所述夜视摄像头113用于将外部管道检查影像传给所述树莓派主控板110中进行影像处理,所述补光灯114用于进行视觉补光效果增加所述夜视摄像头113的录像效果,所述体感深度相机115用于判断前方行径路况,所述安装架116设置于所述巡检机壳103上用于支撑所述封装推进器117的安装,通过所述封装推进器117推动整体装置进行移动,所述定杆超级磁铁118用于将所述电动伸缩定杆119磁吸安装至所述巡检机壳103上,配合所述电动伸缩动杆120控制两侧的所述巡检机壳103相互靠近或者远离,四个所述巡检装置101通过磁性定位配合所述电动伸缩机构102改变整体装置的半径达到变径的效果,通过每个连接处镜像设置两组所述电动伸缩机构102达到伸缩和扩展平稳,使用对管道外侧检测的方式解决采用内管道巡检机器人对管道进行缺陷检测时,需要关停石油管道并对内腔附着油污进行清洗后,采用管道机器人相机检测,费时费力且效率低下的问题。
本申请第二实施例为:
请参阅图6,其中,图6是本发明第二实施例的巡检装置侧视图示意图。
在第一实施例的基础上,本发明提供的一种水下外管道组合变径巡检机器人,所述推进机构还包括过滤件201,所述过滤件201包括固定环202、过滤罩203、过滤挡板204和过滤网205。
其中,所述过滤件201设置于所述封装推进器117一侧,所述过滤件201设置于所述封装推进器117的进水口处,防止水草,渔网,石子,漂浮垃圾等杂物吸入所述封装推进器117内部损坏内部螺旋桨,从而增加所述封装推进器117的使用寿命。
其次,所述固定环202与所述封装推进器117固定连接,并位于所述封装推进器117一侧;所述过滤罩203与所述固定环202固定连接,且与所述封装推进器117固定连接,并位于所述固定环202一侧;所述过滤挡板204与所述过滤罩203固定连接,并位于所述过滤罩203一侧;所述过滤网205与所述过滤罩203固定连接,并位于所述过滤罩203内侧,所述固定环202用于支撑所述过滤罩203的安装,所述过滤罩203覆盖在所述封装推进器117进水口处通过所述过滤挡板204隔绝较大的杂物,然后配合所述过滤网205过滤细小的杂物,防止水草,渔网,石子,漂浮垃圾等杂物吸入所述封装推进器117内部损坏内部螺旋桨,从而增加所述封装推进器117的使用寿命。
本实施例所述的一种水下外管道组合变径巡检机器人,所述固定环202用于支撑所述过滤罩203的安装,所述过滤罩203覆盖在所述封装推进器117进水口处通过所述过滤挡板204隔绝较大的杂物,然后配合所述过滤网205过滤细小的杂物,防止水草,渔网,石子,漂浮垃圾等杂物吸入所述封装推进器117内部损坏内部螺旋桨,从而增加所述封装推进器117的使用寿命。
以上所揭露的仅为本申请一种或多种较佳实施例而已,不能以此来限定本申请之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本申请权利要求所作的等同变化,仍属于本申请所涵盖的范围。