基于渗漏前后雷达信息和图像相关系数的不确定性供水管道渗漏诊断方法
文献发布时间:2024-01-17 01:26:37
技术领域
本发明属于供水管道渗漏诊断技术领域,涉及渗漏前后探地雷达信息已知时的管道渗漏部位识别,具体涉及一种基于渗漏前后雷达信息和图像相关系数的不确定性供水管道渗漏诊断方法。
背景技术
随着社会发展,供水管道的规模不断扩大,但由于常年埋设地下,管道漏损问题日益突出,漏点位置查找困难不利于维护检修,管道漏损在造成水资源浪费和环境污染的同时也会带来安全隐患。
现有的管道漏损检测方法主要分为直接检测法和间接检测法。直接检测法是利用各种设施设备直接对管道本身是否破损进行检测,最常用的包括内窥机器人检测技术和压力计检测技术,这一类检测都需要深入管道内部,必要时还需中断管道正常工作。间接检测法是利用管道漏损引发的结果来判断管道状态,这类方法无需进入管道内部,环境条件限制较少,主要包括泄漏噪声检测技术、瞬变电磁检测技术和探地雷达检测技术。泄漏噪声检测技术是根据管道泄漏时发出的不同于正常管道的声波判断泄漏程度和位置,这种检测方法在城市环境中很容易受环境噪声的影响,检测可靠性不佳。瞬变电磁技术主要是通过埋地管道与周围土层之间的电性差异判断管道的缺陷,主要用于油气类金属管道,对于供水管道领域的非金属管道检测无能为力。探地雷达技术是一种无损物探手段,具有快速、无损、不易受干扰等优点,被广泛运用于土木工程检测领域。
基于探地雷达检测供水管道泄漏是近些年发展起来的,检测时无需中断管道正常工作,无需破土深入,可以在道路表面对供水管道进行损伤检测,对城市环境的适应性很强,但目前管道漏损雷达图像的识别依赖于相关技术人员经验判断,缺乏客观的判定方法,难以准确判断管道漏损位置,而识别渗漏图像是查找管道渗漏部位的重要一环,直接关系到管网漏点的准确定位,因此需要建立一套管道渗漏诊断方法,实现管网漏点的客观准确定位。
发明内容
有鉴于此,本发明的目的在于提供一种基于渗漏前后雷达信息和图像相关系数的不确定性供水管道渗漏诊断方法,针对漏损管道雷达图像识别依靠技术人员经验,管道漏点定位主观性较强且可靠性不足的现状,采用一种基于图像相关性理论的管道渗漏诊断方法,以已知的管道未渗漏图像为基准,计算同一条测线的渗漏图像与未渗漏图像相关系数,以相关系数作为诊断管道漏点位置的客观依据,并基于统计分析,结合多次探测图像相关系数指标进行分布检验,削弱测试误差和计算误差等不确定性因素的影响,提升供水管道漏点定位的可靠性。
为达到上述目的,本发明提供如下技术方案:
一种基于渗漏前后雷达信息和图像相关系数的不确定性供水管道渗漏诊断方法,以供水管道无渗漏雷达回波图像与有渗漏雷达回波图像为计算目标,根据图像相关性基本原理,计算渗漏图像与未渗漏图像的相关系数,以相关系数作为诊断管道渗漏的数字标准。
该方法具体包括以下步骤:
S1:垂直于供水管道按一定间距划定测线(根据管道修建的原始记录,对于大管径过水量大的管道,渗漏覆盖范围可能较广,可以布置稍稀疏的测线;如果是小管径过水量小的管道,渗漏覆盖范围相对较小,需要划定较密集的测线以免漏测),在未渗漏状态下探测获取每条测线的雷达回波图像,简称未渗漏状态图像;
S2:在渗漏状态下重复获取每条测线的雷达回波图像,简称渗漏状态图像;
S3:将所有雷达回波图像按统一像素大小裁剪;
S4:计算所有渗漏状态图像与同测线未渗漏状态图像的相关系数;
S5:检验渗漏状态下相关系数的分布情况,具体是:将同一条测线各测试组的渗漏状态图像与未渗漏状态图像的相关系数进行分布检验,根据分布形态判断使用均值描述或中位数描述差异。
进一步,步骤S1或S2中,雷达回波图像采用灰度图像,图像采集的过程中采用相同的雷达参数和采样速度,在探测过程中可以采用标定和距离均一化配合处理,尽量使图像图幅一致,图像采用JPG格式。
进一步,步骤S4具体包括:以未渗漏状态图像为基准,计算同一条测线的渗漏状态图像与未渗漏状态图像的相关系数;在基准图像中任意选取某一坐标像素点P(x
其中,
由于渗漏的局部性,根据相关系数能得出以下两种结论:
1)远离漏点的区域由于未受到渗漏影响,即使是在管道发生渗漏后,雷达回波图像仍然是未渗漏状态图像,即管道渗漏前后图像特征一致,相关性较好。
2)漏点附近测线受到管道渗漏的影响,渗漏前后的雷达回波图像特征发生变化,同测线渗漏图像与未渗漏图像对比相关性降低,故能够通过渗漏前后雷达回波图像相关系数判定漏点所在测线范围。
进一步,步骤S5中,基于统计分析基本理论,结合多次探测图像相关性指标的分布检验,提出一种基于概率或非概率的不确定性供水管网渗漏诊断方法优化上述诊断结果。通过同测线多次探测渗漏图像,分别计算与未渗漏状态图像的相关系数,并对相关系数进行分布检验,根据分布形态判断使用均值或中位数描述差异。削弱了测试误差和计算误差等不确定性因素的影响,提升埋地供水管道检测的准确性。
根据分布形态判断使用均值描述或中位数描述差异,具体包括:
1)若为正态分布,当某测线相关系数明显低于总体的均值,则判定该测线区域为管道漏点所在区域;
2)若为非正态分布,当某测线相关系数明显低于总体的中位数,则判定该测线区域为管道漏点所在区域。
本发明的有益效果在于:本发明能够有效识别漏损管道图像并进行管道漏点定位,通过与同测线未渗漏图像的相关性计算,采用相关系数作为判定管道渗漏位置的客观标准,能够摆脱识别雷达图像需要依靠技术人员经验分析的现状。同时,结合多次探测图像相关性指标的分布检验,有效削弱测试误差和计算误差等不确定性因素对诊断结果的不利影响,提升埋地供水管道漏点检测的准确性。
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
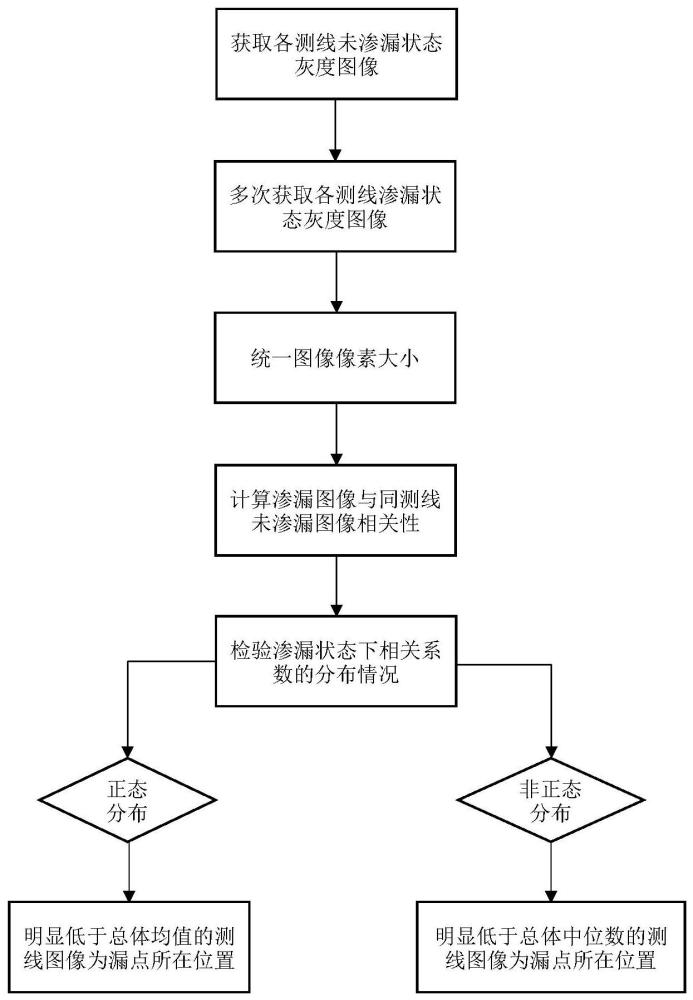
图1为本发明基于渗漏前后雷达信息和图像相关系数的不确定性供水管道渗漏诊断方法流程图;
图2为测线划分示意图;
图3为统一灰度图像像素大小示意图。
具体实施方式
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本发明的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本发明的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
请参阅图1~图3,本发明实施例提供一种基于渗漏前后雷达信息和图像相关系数的不确定性供水管道渗漏诊断方法,采用管道渗漏前后探地雷达灰度图像计算相关系数来判定供水管网漏点位置,并结合多次探测图像通过相关性指标的分布检验对渗漏位置准确识别。该方法包含以下步骤:
步骤1:垂直于供水管道按一定间距划定测线(对于管径在DN300以下的管道,测线间距需小于10m、DN500以上测线间距可为10~20m,(测线具体间距须根据管径、管道压力大小、现场环境综合考虑)),在未渗漏状态下探测获取每条测线的雷达回波图像。雷达回波图像采用灰度图像,图像采集的过程中采用相同的雷达参数和采样速度,在探测过程中可以采用标定和距离均一化配合处理,尽量使图像图幅一致,图像采用JPG格式。
步骤2:在渗漏状态下重复获取每条测线的雷达图像,所有图像采用JPG格式。
步骤3:将所有雷达灰度图像按统一像素大小裁剪。
步骤4:计算所有渗漏图像与同测线未渗漏图像的相关系数。以未渗漏图像为基准,计算同一条测线的渗漏状态图像与未渗漏图像的相关系数。在基准图像中任意选取某一坐标像素点P(x
其中,
步骤5:检验渗漏状态下相关系数的分布情况。将同一条测线各测试组的渗漏状态图像与未渗漏图像的相关系数进行分布检验,根据分布形态判断使用均值描述或中位数描述差异。
1)若为正态分布,当某测线相关系数明显低于总体的均值,则判定该测线区域为管道漏点所在区域。
2)若为非正态分布,当某测线相关系数明显低于总体的中位数,则判定该测线区域为管道漏点所在区域。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。