多线激光扫描隧道三维重构方法
文献发布时间:2023-06-19 11:45:49
技术领域
本发明属于城市轨道交通工程设计技术领域,具体涉及一种多线激光扫描隧道三维重构方法。
背景技术
现今城市轨道交通日益发展,地铁隧道是轨道交通的重要组成部分,地铁的规划设计、线路测量、工程实施等等,每个环节的实施都存在很多难点和问题,也非常考验工程技术人员。就传统的测量方式以及监测来看,不仅仅是难度大、耗时长,而且施工的过程当中还会出现很多未预料到的情况,影响地铁的正常施工和建设。因地铁施线路敷设方式多变、工地水文质条件复杂,地下建构筑物、管线管廊等勘测不准确、等诸多问题,在隧道施工及铺轨施工过程中若依靠人工去完成相关工作的监测测量,不仅效率低下而且不能保证测量误差及精度,同时需配备大量监测记录人员。
利用三维扫描的方式将隧道环境进行还原,可提高地铁隧道的监测质量及速度。现有的隧道三维扫描技术多采用单线激光雷达扫描隧道的三维信息。同时扫描方式分为移动式扫描和静止式扫描。移动式扫描是指将雷达放置在移动平台上,通过雷达扫描整条隧道,因而扫描速度快,但是因为雷达是移动的,所以雷达扫描类似是螺旋式扫描,所以会丢失部分信息,精度不高。静止式扫描是将雷达静止然后扫描周围信息,该方式扫描精度高,但是设备静止,因而要扫描全部隧道需要耗费很多时间、效率低。
发明内容
本发明的目的是提供一种多线激光扫描隧道三维重构方法,解决了现有技术中存在的问题,提高隧道三维扫描的精度和效率。
本发明所采用的技术方案为:
多线激光扫描隧道三维重构方法,其特征在于:
所述方法包括以下步骤:
步骤1:利用多线激光雷达扫描系统对隧道或地下空间进行扫描、测量,并获取相关扫描数据信息,系统同时记录扫描行进速度及距离;
步骤2:根据系统移动距离及扫描数据,提取同一位置的点云三维数据,对数据进行分析、处理并进行统计离群值清除,去除不相关的离散点及噪点;
步骤3:对经过离群值清除后的数据进行分析,计算出其重心,用其重心来表示当前位置的实际三维点;
步骤4:将经过处理后的激光三维点根据移动的实际位置进行适应性拉伸和延展,得到隧道三维初步模型;
步骤5:对隧道三维初步模型利用双边滤波进行滤波,在保持边缘数据不受较远数据的影响的同时对数据进行去噪。
步骤2中,统计离群值清除的过程为:
2.1:对于每个点i,取其邻域;
2.2:计算这个点到它邻域内每个点j的距离d
2.3:计算均值μ和方差σ,其中k为点的个数;
2.4:对方差及均值进行判断,条件为:
如果不满足则剔除该点。
步骤3中,用重心来表示当前位置实际三维点的过程为:
计算出离群值清除后数据的重心,用其重心来表示当前位置的实际三维点:
式中P
步骤5中,对隧道三维初步模型利用双边滤波进行滤波的过程为:
在三维点云数据的滤波中,定义:q’为滤波后的数据点;q为滤波前的数据点;a为双边滤波权因子;
n为数据点q的法向量;
N(q
参数σ
本发明具有以下优点:
1.本发明充分利用多线雷达数据量多的特点,对数据进行融合滤波,可以得到更高的精度的测量数据;
2.移动式多线雷达扫描三维数据能够在保证精度的同时扫描整个隧道的时间也会比较快,具有较强的实用价值。
附图说明
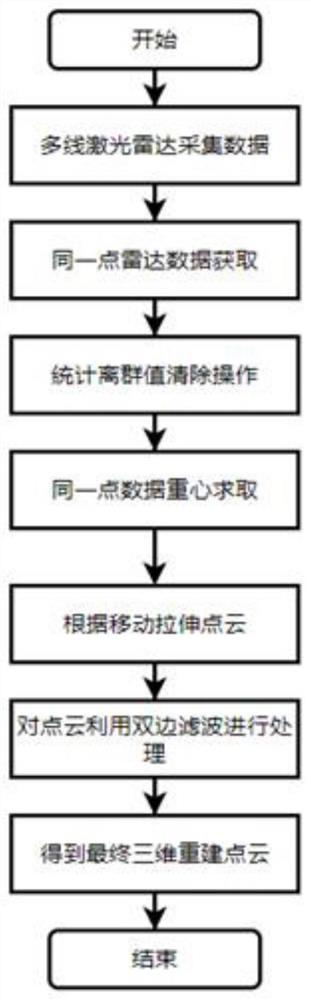
图1是本发明方法流程图;
图2是统计离群值清除示意图;
图3是重心求取示意图。
具体实施方式
下面结合具体实施方式对本发明进行详细的说明。
本发明涉及一种多线激光扫描隧道三维重构方法,是一种城市轨道交通隧道三维扫描并进行重构的方法,应用在比如隧道灾害,设备限界侵界检查等,步骤包括:
首先,利用多线激光雷达扫描系统对隧道或地下空间进行扫描、测量,并获取相关扫描数据信息,系统同时记录扫描行进速度及距离。
其次,根据系统移动距离及扫描数据,提取同一位置的点云三维数据,对数据进行分析、处理并进行统计离群值清除,去除不相关的一些离散点及噪点,保证数据的准确性和完整性。
计算公式如下:
1)对于每个点i,取其邻域;
2)计算这个点到它邻域内每个点j的距离d
3)计算均值μ和方差σ,设点的个数为k;
4)对方差及均值进行判断(判断条件详见下式),如果不满足以下条件则剔除改点:
再次,对经过离群值清除后的数据进行分析,计算出其重心,用其重心来表示当前位置的实际三维点,如图3所示:
式中P
然后,将经过处理后的激光三维点根据移动的实际位置进行适应性拉伸和延展,随即得到隧道三维初步模型。
最后,由于隧道及地下空间是一个较为封闭的区域,其物理边界与轨旁备、轨道及其它区域有较为明显分界和轮廓,因此对初步的隧道模型利用双边滤波进行滤波,在保持边缘数据不受较远数据的影响的同时对数据进行去噪,双边滤波具体原理如下:
在三维点云数据的滤波中,定义如下:
在三维点云数据的滤波中,定义:q’为滤波后的数据点;q为滤波前的数据点;a为双边滤波权因子;
q′
n为数据点q的法向量;N(q
参数σ
本发明的内容不限于实施例所列举,本领域普通技术人员通过阅读本发明说明书而对本发明技术方案采取的任何等效的变换,均为本发明的权利要求所涵盖。
- 多线激光扫描隧道三维重构方法
- 多线阵列激光三维扫描系统及多线阵列激光三维扫描方法