一种基于人工智能的地下构造物的物探识别方法
文献发布时间:2024-04-18 19:48:15
技术领域
本发明属于采集建设工程领域,涉及一种基于人工智能的地下构造物的物探识别方法。
背景技术
采集建设工程现场的地下构造物信息,是为了全面了解工地现场施工情况,通过对地下构造物信息的采集,能及时发现并解决施工中存在的相关问题,提高公司项目质量、品质等目标的管控能力。
现有技术中,采集建设工程现场的地下构造物信息的方式主要靠人工采集数据,相较于人工成本高昂、风险大、采集效率低下、容易主观漏检等问题,所述物探识别系统能够智能化、具体化地呈现问题点,准确度高、效率高。
但是建筑工程项目现场环境复杂,地下构造物多而杂(例如电线、木板、钢筋等),并且随着项目进度的推进,项目现场地下构造物也会不断改变,而人工采集数据需要耗费大量时间与成本,风险大、周期长、效率低、成本高。且随着项目现场的施工变化,需要实时探测地下构造物的信息,若仅依靠人工进行探测,任务量非常繁重,难以做好物探识别工作。
发明内容
为了克服已有技术的不足,本发明提供了一种基于人工智能的地下构造物的物探识别方法,用于采集建设工程现场的地下构造物信息并适时发出警报提醒操控人员停止工作。
本发明解决其技术问题所采用的技术方案是:
一种基于人工智能的地下构造物的物探识别方法,包括以下步骤:
S1、通过探测装置或人工采集建设工程项目现场的合规范的图像信息;
S2、结合采集装置发送的信息和确定的三维坐标将信息整理分类完成;
S3、根据信息判断地下构造物的属性、大小、位置,得到物探识别结果;
S4、向探测装置、报警装置和显示装置发送探测指令、是否报警防控的指令和地下构造物的物探识别结果,探测装置开始或停止工作,报警装置发出或不发出警报;
S5、当人工对指令有异议时,可以向问题分析系统作出反馈指令,反馈指令能控制探测装置和报警装置的运行;
S6、根据问题点截取若干帧问题图像,并发送至人工反馈端;
S7、实时分析图像信息,判断地下构造物的属性、大小、位置变化,实时更新物探识别结果与数据。
进一步,实现所述方法的物探识别系统包括探测装置、控制中心、显示装置和报警装置,所述探测装置与所述控制中心通过无线网络连接;所述探测装置包括第一收发单元、用于采集建设工程项目现场的地下构造物信息的采集装置和用于驱动所述采集装置移动的驱动装置;所述控制中心包括第二收发单元和控制指令单元,所述控制指令单元内存储有用于控制所述探测装置、报警装置工作的探测指令和是否报警防控的指令,其中,所述探测指令包括所述探测装置里探头下一步要探测的方位、深度;所述控制中心还包括GPS定位服务器、智能分析单元和问题分析系统,所述智能分析单元结合探测装置发送的图像信息和GPS定位服务器确定的三维坐标,判断地下构造物的属性、大小和位置,并将结果发送至控制指令单元;所述问题分析系统将所述实际波形图情况与所述参照波形图进行比对,所述控制指令单元通过实时分析智能分析单元发送的识别结果,判断并更新所述探测指令和报警防控指令。
进一步,所述智能分析单元包括数据处理单元和物体分析单元,所述数据处理单元实时分析所述采集装置的图像信息和GPS定位服务器确定的三维坐标,并将信息整理分类完成并发送至物体分析单元;所述物体分析单元根据接收到的数据处理单元的信息实时分析图像信息,判断地下构造物的属性、大小、位置,确认探测路线上的地下构造物变化,实时分析场景变化,自动更新物探识别结果,智能程度高。
优选的,所述智能分析单元的运行基于视觉陌生度驱动的增量自主式视觉学习算法。
再进一步,所述显示装置还包括人工反馈端,所述控制中心与所述人工反馈端通过无线网络连接,所述人工反馈端包括第三收发单元和显示单元,所述控制中心将所述问题点发送至所述人工反馈端,所述人工反馈端向所述控制中心作出反馈指令,所述反馈指令能控制探测装置和报警装置的运行,当人工反馈的指令不同于控制指令单元发出的指令时,于所述人工反馈端赋予最高优先级,人工反馈可以避免系统出错;当人工反馈的指令与控制指令单元发出的指令相同时,所述智能分析单元将新的探测指令和新的是否报警防控的指令存储于所述控制指令单元并赋予最高优先级。
更进一步,所述问题分析单元根据所述问题点从所述采集装置的图像信息中截取若干帧问题图像,所述控制中心将所述问题图像发送至所述人工反馈端。
所述采集装置包括能向构造物发射高频电磁波的探头,其探头还能接收其在介质中进行差异性反射和传递的电磁波。
所述驱动装置包括各类型号的挖掘机。
本发明的有益效果主要表现在:
1、通过探测装置采集建设工程现场地下构造物的超声波回弹频率、时差所形成的连续波普线图,能更直观地观测地下构造物的波形,探测过程操作简单,且信息反馈快速、准确。采集功能全,效率高,能有效缩短工期,节约成本。
2、通过控制中心根据采集的图像信息进行问题分析,能够智能化、具体化地呈现问题点,准确度高、效率高,避免人工分析的高成本、低效率以及主观误判漏判等问题。
3、通过智能分析单元实时分析图像信息,实现实时根据场景元素变化更新探测方位路线,以及主动探索新的区域范围以更新图像采集区域,无需人为地进行数据收集以及规划,且每次探测工作中进行更新,能够及时地适应建筑工程项目现场的场景变化,跟紧项目进度,节省大量人力。
附图说明
图1为本发明的系统结构示意图;
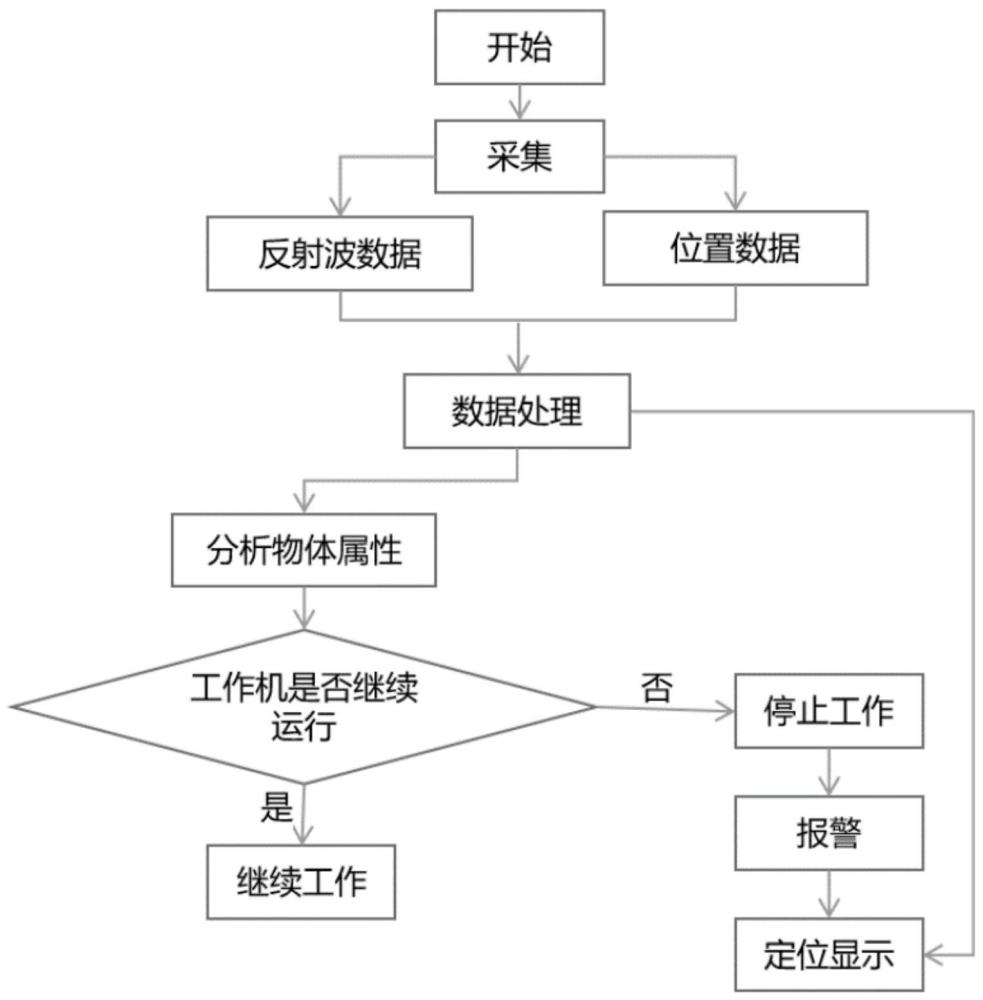
图2为方法的流程图。
图3为不同的媒质的反射波特征图,以工程中常见的金属板为例,其中,(a)为雷达剖面,(b)为对应的频谱,(c)为一条波形曲线的振幅图,(d)为对应的频谱曲线。
图4为不同的媒质的反射波特征图,以工程中常见的混凝土钢筋为例,(a)为雷达剖面,(b)为对应的频谱,(c)为一条波形曲线的振幅图,(d)为对应的频谱曲线。
具体实施方式
下面结合附图对本发明作进一步描述。
参照图1~图4,一种基于人工智能的地下构造物的物探识别方法,包括以下步骤:
S1、通过探测装置或人工采集建设工程项目现场的合规范的图像信息;
S2、结合采集装置发送的信息和确定的三维坐标将信息整理分类完成;
S3、根据信息判断地下构造物的属性、大小、位置,得到物探识别结果;
S4、向探测装置、报警装置和显示装置发送探测指令、是否报警防控的指令和地下构造物的物探识别结果,探测装置开始或停止工作,报警装置发出或不发出警报;
S5、当人工对指令有异议时,可以向问题分析系统作出反馈指令,反馈指令能控制探测装置和报警装置的运行;
S6、根据问题点截取若干帧问题图像,并发送至人工反馈端;
S7、实时分析图像信息,判断地下构造物的属性、大小、位置变化,实时更新物探识别结果与数据。
实现所述方法的基于人工智能的地下构造物的物探识别系统,参照图1所示,包括探测装置,所述探测装置包括采集机构,所述采集机构包括用于采集的高频电磁波发射器,以及采集波形图的波的收集装置,所述探测装置还包括驱动所述采集机构移动的驱动机构,所述驱动机构包括但不限于无人机或自行走小车,所述探测装置通过所述驱动机构在建筑工程项目现场行走,并通过所述采集机构采集项目现场的电磁波图信息。
所述地下构造物的物探识别系统还包括控制中心,所述探测装置与所述控制中心通过无线网络连接,所述控制中心包括第二收发单元,所述探测装置包括第一收发单元,所述控制中心与所述探测装置通过所述第一收发单元和所述第二收发单元实现数据交互。
所述控制中心包括控制指令单元,所述控制指令单元内存储有用于控制所述探测装置工作的探测路线指令和采集区域指令,其中,所述采集区域指令包括所述探测装置的所处位置,所述控制指令单元向所述探测装置发送所述探测路线指令和所述采集区域指令,所述探测装置根据所述探测路线指令进行移动,并对所述采集区域指令所指示的位置进行图像采集,其中,初始的所述探测路线指令以及所述采集区域指令是通过工作人员在根据建筑工程项目现场的实际场景情况做出的规划,并录入至所述控制指令单元内。
所述控制中心还包括GPS定位服务器和问题分析单元,建筑工程项目现场投入作业前,通过人工或所述探测装置采集相应的初始规范的反射波信息,所述GPS定位服务器根据该信息进行定位,并且把三维坐标发送到数据处理单元。
在进行探测工作中,所述采集机构向所述控制中心传输的波形图所述问题分析单元调用专业软件将所述实际波形图情况与所述参照波形图进行比对,根据波形图的不同之处判断所述实际波形图中存在的问题点,从而判断建筑工程项目现场存在的问题
其中,所述地下构造物的物探识别系统还包括人工反馈端,所述人工反馈端与所述控制中心通过无线网络连接,所述人工反馈端包括第三收发单元和显示单元,所述控制中心与所述人工反馈端通过所述第二收发单元和所述第三收发单元实现数据交互,所述问题分析单元根据所述问题点截取相应图像信息中的若干帧图像,发送至所述人工反馈端并于所述显示单元所显示,通过工作人员进行人为确认,并通知相应维修人员,要求处理。
实际的建筑工程项目中,施工现场的场景是复杂多变的,随着项目的不断进行,场景内的建筑物、设备、人员等都在进行变动,而所述控制中心中的所述探测路线指令和所述采集区域指令是特定的,需要人为地进行更新,需要额外地采集图像信息、建模,人为核实确定新的指令,容易耗费大量时间与人力,施工进度快的现场则需要更为频繁的更新,极易加重人力资源成本。
因此,本实施例的所述控制中心内还设有智能分析单元,所述智能分析单元包括数据分析单元和物体分析单元,所述数据分析单元和所述物体分析单元均实时分析所述采集机构的波形图像信息,所述物体分析单元根据波形图像信息确认原探测路线上的场景元素变化,判断所述探测机构按原所述探测路线指令移动是否可行,若可行,则按原所述探测路线指令行进,若不可行,则生成可行的新的所述探测路径指令;
所述数据分析单元根据实时分析采集装置的接收到的不同超声波回弹频率、时差所形成的连续波普线图等,同时结合GPS定位服务器确定的三维坐标,将信息整理分类完成并发送至物体分析单元。
因此,在所述探测装置进行探测工作中,即可以实现实时根据场景元素变化更新探测路线,以及主动探索新的超声波回弹频率、时差所形成的连续波普线图,且每次探测工作中进行更新,能够及时地适应建筑工程项目现场的场景变化,跟紧项目进度,节省大量人力。
其中,所述物体分析单元的运行基于特定的媒介拥有特定的波形这一特性以工程中常见的以工程中常见的、金属板、混凝土钢筋为例参照图3和图4所示。
图3所示,金属板是用主频900MHz的天线在金属板上所采集到的雷达剖面、波形曲线以及它们所对应的频谱图。从图3金属板(a)可以看到,电磁波反射成条带状分布;结合图3金属板(b),可见电磁波能量主要集中于某一频率成分;从图3金属板(d)得知,该频率为900MHz,这个频率是雷达天线发射的主要频率,其余高频成分全被金属板吸收殆尽,由反射系数的菲涅耳(Fresnel)公式可知,波从介电常数小的媒质进入介电常数大的媒质时,反射系数为负,即反射波相位相反,且介电常数差异越大,反射波振幅越强,典型波形图如图(c)。可见,地质雷达发射的高频电磁波在金属板上所产生的雷达图像具有频率成分单一、高频成分急剧衰减、反射波反相、同相轴连、,能量急剧衰减之特点
钢筋是混凝土建筑的基本骨架,在混凝土工程建筑质量检测中对钢筋的数量、分布状态的检测是一个很重要的方面。图4钢混是用主频900MHz的天线在混凝土挡土墙上所采集到的雷达剖面、波形曲线以及它们所对应的频谱图,设计混凝土预埋钢筋埋
可见,电磁波在混凝土等媒质预埋钢筋探测时的波形特征为:当天线中心位于钢筋正上方时,反射能量最强;同相轴连续,外型呈双曲线形态;钢筋位于双曲线顶点且与初始相位反相;双曲线两翼是由雷达天线发射圆锥形电磁波所引起,该信号对深部信号分析形成干扰。深25cm,间距50cm。从图4钢混(a)可以看到,电磁波反射形成连续的小双曲线形状,旦混凝土的相对介电常数e1<<钢筋的相对介电常数e2,因此取双曲线顶点第一反相点为钢筋位置点,图中圆点所示;结合图4钢混(b),可见电磁波能量在整个频带上都有分布,说明电磁波能够穿越钢筯间隙到达混凝土深部;结合图4钢混(d)得知,在350MHz、560MHz、1200MHz、2000MHz、2600MH2等频点都具有一定的能量分布,天线中心位置在钢筋正上方时的典型波形曲线如图4(c)。
所述智能分析单元包括数据处理单元和物体分析单元,所述数据处理单元实时分析所述采集装置的图像信息和GPS定位服务器确定的三维坐标,并将信息整理分类完成并发送至物体分析单元;所述物体分析单元根据接收到的数据处理单元的信息实时分析图像信息,判断地下构造物的属性、大小、位置,确认探测路线上的地下构造物变化,实时分析场景变化,自动更新物探识别结果,智能程度高。所述物体分析单元的运行基于特定的媒介拥有特定的波形这一特性以工程中常见的以工程中常见的、金属板、混凝土钢筋为例。所述显示装置还包括人工反馈端,所述控制中心与所述人工反馈端通过无线网络连接,所述人工反馈端包括第三收发单元和显示单元,所述控制中心将所述问题点发送至所述人工反馈端,所述人工反馈端向所述控制中心作出反馈指令,所述反馈指令能控制探测装置和报警装置的运行,当人工反馈的指令不同于控制指令单元发出的指令时,于所述人工反馈端赋予最高优先级,人工反馈可以避免系统出错;当人工反馈的指令与控制指令单元发出的指令相同时,所述智能分析单元将新的探测指令和新的是否报警防控的指令存储于所述控制指令单元并赋予最高优先级。因此,这种通过人为的确认,能够避免意外生成错误指令而错误执行探测工作。
基于上述系统实施的方法,包括以下步骤:
S1、通过探测装置或人工采集建设工程项目现场的合规范的图像信息并上传至控制中心;
S2、数据处理单元结合采集装置发送的信息和GPS定位服务器确定的三维坐标将信息整理分类完成并发送至物体分析单元;
S3、物体分析单元根据数据处理单元的信息判断地下构造物的属性、大小、位置,物探识别结果发送至控制指令单元;
S4、控制指令单元向所述探测装置、报警装置和显示装置发送探测指令、是否报警防控的指令和地下构造物的物探识别结果,所述探测装置开始或停止工作,报警装置发出或不发出警报;
S5、当人工对指令有异议时,显示单元中的人工反馈端可以向问题分析系统作出反馈指令,反馈指令能控制探测装置和报警装置的运行;
S6、问题分析单元根据问题点截取若干帧问题图像,并发送至人工反馈端;
S7、智能分析单元实时分析图像信息,判断地下构造物的属性、大小、位置变化,实时更新物探识别结果与数据。
本说明书的实施例所述的内容仅仅是对发明构思的实现形式的列举,仅作说明用途。本发明的保护范围不应当被视为仅限于本实施例所陈述的具体形式,本发明的保护范围也及于本领域的普通技术人员根据本发明构思所能想到的等同技术手段。