一种垃圾焚烧发电厂焚烧炉投料口物料识别方法与系统
文献发布时间:2024-04-18 19:48:15
技术领域
本发明涉及垃圾焚烧技术领域,尤其涉及一种垃圾焚烧发电厂焚烧炉投料口物料识别方法与系统。
背景技术
目前,垃圾焚烧发电厂通过对贮存在垃圾池内发酵的垃圾料进行抓取、投炉,并在焚烧炉内进行焚烧,从而可通过燃烧所产生的热量进行发电。
现有的焚烧炉对垃圾池内的垃圾的抓取以及垃圾投入到焚烧炉内的操作均是人工手动操作的,从而使得人工的劳动强度大,工作效率低,因此通过机械结构对垃圾进行自动抓取并投入到焚烧炉内,从而减轻了工作人员的工作量,进而提高了工作效率。
在对垃圾进行焚烧时,需要使用机械结构对垃圾进行自动抓取并投入到焚烧炉内,但是现有的焚烧炉的投料口容量余量及投料口吞料速度等关键生产因素判断也采用全人工肉眼观察的方式来进行长期的观察,从而增加了工作人员的劳动强度。
发明内容
本发明的目的在于提供一种垃圾焚烧发电厂焚烧炉投料口物料识别方法与系统,解决了现有的焚烧炉的投料口容量余量及投料口吞料速度等关键生产因素判断也采用全人工肉眼观察的方式来进行长期的观察,从而增加了工作人员的劳动强度的技术问题。
为实现上述目的,本发明提供了一种垃圾焚烧发电厂焚烧炉投料口物料识别方法,包括以下步骤:
在焚烧炉的每个投料口处配置可靠的高分辨率固定摄像头,上下移动并转动所述摄像头,让所述摄像头对所述投料口处进行全方位的监测;
对所述投料口处进行投料数据采集,通过所述摄像头对所述投料口的投料行为进行持续的记录,收集足够多的特征值素材;
对所收集的所述特征值素材按所述投料口的容量面积与投料面积的占比设定阈值,并将其分类为有料、无料两种状态的图片素材以供识别算法提取特征值进行学习;
根据所采集的所述特征值素材,基于乌班图Linux操作系统下python进行算法程序开发,并将素材上传算法识别学习,建立知识库;
将完成特征值识别学习达到识别分析所述投料口投料状态的算法植入垃圾吊行车调度逻辑,从而达到垃圾吊及抓斗自主完成投料的效果;
算法持续学习,将后续生产中出现的识别误差记录并利用算法学习提供识别精度和效果。
本发明还提供了一种垃圾焚烧发电厂焚烧炉投料口物料识别系统,包括焚烧炉,所述焚烧炉具有投料口,所述投料口位于所述焚烧炉的一侧,还包括执行组件;所述执行组件包括支撑板、驱动块、连接块、滑动块、摄像头、固定板、插销和活动块,所述支撑板固定安装在所述焚烧炉靠近所述投料口的一侧,所述驱动块用于驱动所述连接块移动,所述连接块位于所述驱动块远离所述支撑板的一侧,所述滑动块与所述连接块滑动连接,并位于所述连接块的内侧,所述摄像头固定安装在所述滑动块远离所述连接块的一侧,所述固定板固定安装在所述连接块的外侧,所述插销与所述连接块滑动连接,并与所述滑动块滑动连接,且位于所述连接块靠近所述滑动块的一侧,所述活动块用于移动所述插销。
其中,所述驱动块包括液压缸和伸缩杆,所述液压缸固定安装在所述支撑板的下表面;所述伸缩杆与所述液压缸的输出端连接,并位于所述液压缸的下表面。
其中,所述驱动块还包括第一电机和第一转动杆,所述第一电机固定安装在所述伸缩杆的下端;所述第一转动杆与所述第一电机的输出端连接,并位于所述第一电机的下表面。
其中,所述驱动块还包括第二电机和第二转动杆,所述第二电机固定安装在所述第一转动杆的下端;所述第二转动杆的两端分别与所述第二电机的输出端和所述连接块连接,所述第二转动杆位于所述第二电机和所述连接块之间。
其中,所述垃圾焚烧发电厂焚烧炉投料口物料识别系统还包括遮挡组件,所述遮挡组件用于遮挡防护所述焚烧炉的内部空间。
其中,所述遮挡组件包括第三电机、连接杆和遮挡板,所述第三电机固定安装在所述焚烧炉靠近所述摄像头的一侧;所述连接杆与所述第三电机的输出端连接,并位于所述第三电机远离所述焚烧炉的一侧;所述遮挡板固定安装在所述连接杆的外侧。
本发明的一种垃圾焚烧发电厂焚烧炉投料口物料识别方法与系统,通过在每个投料口处配置可靠的高分辨率的所述摄像头,让所述摄像头对所述投料口处的投料数据进行采集并持续记录,基于所述摄像头所采集的所述投料口状态信息可以准确反馈所述投料口当前料量、所述投料口吞料情况,自动收拢/放松垃圾抓斗以控制投料精准度、调整抓斗位置以提高投料效率,同时能够有效避免现场员工视觉疲劳后存在的误判情况,在提高投料效率的同时也提高了抓斗安全运行的保障,通过对所述投料口当前料量、所述投料口吞料情况进行时刻反馈,从而不需要人工肉眼长时间的对投料口容量余量及投料口吞料速度等关键生产因素进行观察,进而减轻了工作人员的劳动强度。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
图1是本发明第三实施例的垃圾焚烧发电厂焚烧炉投料口物料识别方法的流程步骤图。
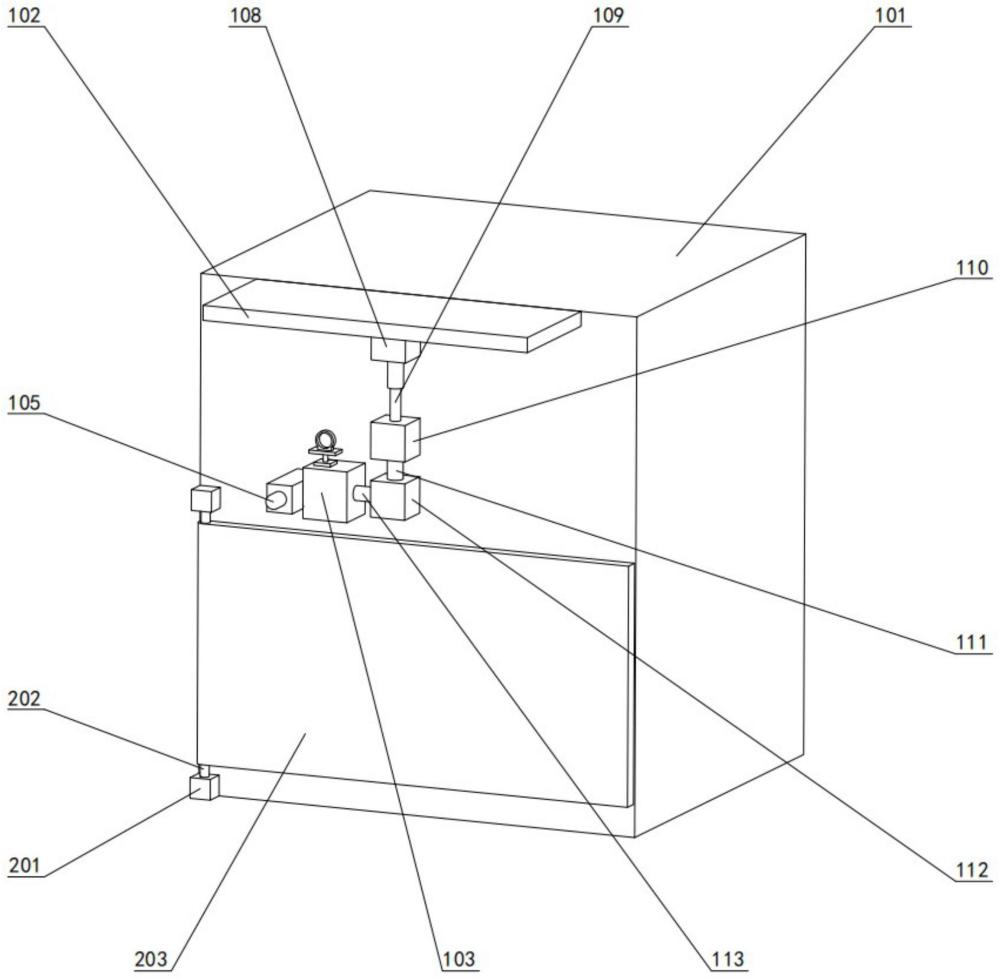
图2是本发明第一实施例的垃圾焚烧发电厂焚烧炉投料口物料识别系统的整体结构示意图。
图3是本发明第一实施例的沿伸缩杆的剖面示意图。
图4是本发明第一实施例的图3的A处放大图。
图5是本发明第二实施例的垃圾焚烧发电厂焚烧炉投料口物料识别系统的遮挡组件的结构示意图。
图中:101-焚烧炉、102-支撑板、103-连接块、104-滑动块、105-摄像头、106-固定板、107-插销、108-液压缸、109-伸缩杆、110-第一电机、111-第一转动杆、112-第二电机、113-第二转动杆、114-滑动板、115-活动杆、116-连接弹簧、117-操作板、118-拉环、119-投料口、201-第三电机、202-连接杆、203-遮挡板。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
第一实施例:
请参阅图1,图1是第一实施例的垃圾焚烧发电厂焚烧炉投料口物料识别方法的流程步骤图,本发明还提供一种垃圾焚烧发电厂焚烧炉投料口物料识别方法,包括以下步骤:
S101、在焚烧炉101的每个投料口119处配置可靠的高分辨率固定摄像头105,上下移动并转动所述摄像头105,让所述摄像头105对所述投料口119处进行全方位的监测;
S102、对所述投料口119处进行投料数据采集,通过所述摄像头105对所述投料口119的投料行为进行持续的记录,收集足够多的特征值素材;
S103、对所收集的所述特征值素材按所述投料口119的容量面积与投料面积的占比设定阈值,并将其分类为有料、无料两种状态的图片素材以供识别算法提取特征值进行学习;
S104、根据所采集的所述特征值素材,基于乌班图Linux操作系统下python进行算法程序开发,并将素材上传算法识别学习,建立知识库;
S105、将完成特征值识别学习达到识别分析所述投料口119投料状态的算法植入垃圾吊行车调度逻辑,从而达到垃圾吊及抓斗自主完成投料的效果;
S106、算法持续学习,将后续生产中出现的识别误差记录并利用算法学习提供识别精度和效果。
使用本实施例的一种垃圾焚烧发电厂焚烧炉投料口物料识别方法时,在所述投料口119处安装所述摄像头105,从而能够更清晰直观的记录所述投料口119和垃圾抓斗的相对位置、所述投料口119的吞料情况等生产要素,同时,需要在每个所述投料口119均配置一台所述摄像头105以确保所述摄像头105的识别精确度,基于所述摄像头105采集的所述投料口119状态信息可以准确反馈所述投料口119当前料量、所述投料口119吞料情况,自动收拢/放松垃圾抓斗以控制投料精准度、调整抓斗位置以提高投料效率,同时能够有效避免现场员工视觉疲劳后存在的误判情况,在提高投料效率的同时也提高了抓斗安全运行的保障,在对垃圾进行抓取时,垃圾爪调度过程中需要考虑所述投料口119是否缺料,所以需要对所述投料口119进行检测,识别出所述投料口119的具体情况,通常方法是利用抠图(Image Matting)、提取特征,并基于知识库进行二分类,以是否达到阈值为标准判断所述投料口119是否缺料,之后分析可观察部分对于整体长度的占比,根据知识库设定阈值,通过判断是否达到阈值来判定是否缺料,Image Matting是一个基本的计算机视觉问题,问题核心是以下公式:I
第二实施例:
在第一实施例的基础上,请参阅图2至图4,其中图2是第二实施例的垃圾焚烧发电厂焚烧炉投料口投料口物料识别系统的整体结构示意图,图3是沿伸缩杆109的剖面示意图,图4是图3的A处放大图,本发明提供一种垃圾焚烧发电厂焚烧炉投料口投料口物料识别系统,包括焚烧炉101和执行组件,所述执行组件包括支撑板102、驱动块、连接块103、滑动块104、摄像头105、固定板106、插销107和活动块,所述驱动块包括液压缸108、伸缩杆109、第一电机110、第一转动杆111、第二电机112和第二转动杆113,所述活动块包括滑动板114、活动杆115、连接弹簧116、操作板117和拉环118,所述焚烧炉101具有投料口119。
在本实施方式中,所述执行组件位于所述焚烧炉101的外侧,用于能够使用所述摄像头105对所述投料口119状态信息进行采集,从而能够对垃圾抓斗抓取垃圾料的多少及与所述投料口119的相对投料位置进行自动判断,进而避免了现场员工视觉疲劳后出现误判而导致出现所述投料口119被堵塞而无法吞料的情况。
其中,所述支撑板102固定安装在所述焚烧炉101靠近所述投料口119的一侧,所述驱动块用于驱动所述连接块103移动,所述连接块103位于所述驱动块远离所述支撑板102的一侧,所述滑动块104与所述连接块103滑动连接,并位于所述连接块103的内侧,所述摄像头105固定安装在所述滑动块104远离所述连接块103的一侧,所述固定板106固定安装在所述连接块103的外侧,所述插销107与所述连接块103滑动连接,并与所述滑动块104滑动连接,且位于所述连接块103靠近所述滑动块104的一侧,所述活动块用于移动所述插销107,所述焚烧炉101内部为中空结构,所述焚烧炉101具有所述所述投料口119,从而使得垃圾可从所述焚烧炉101的所述投料口119处投入到所述焚烧炉101内进行焚烧,所述连接块103可在所述支撑板102下方进行上下移动和转动,从而可带动所述摄像头105进行上下移动和转动,进而可实现对所述焚烧炉101的所述投料口119处进行全方位的监测,所述连接块103具有凹槽,所述滑动块104与所述连接块103的凹槽相配合,从而使得所述滑动块104可插入到所述连接块103的凹槽内,进而使得所述摄像头105可在所述连接块103上被限位固定,所述连接块103具有滑槽,所述插销107可在所述连接块103的滑槽内进行横向移动,所述滑动块104和所述插销107均为斜边结构,且所述滑动块104和所述插销107的斜率相同,从而使得在推力的作用下,所述滑动块104可将所述插销107向上挤压,所述滑动块104具有定位槽,所述插销107与所述滑动块104的定位槽相配合,从而使得所述插销107可插入到所述滑动块104的定位槽内。
其次,所述液压缸108固定安装在所述支撑板102的下表面;所述伸缩杆109与所述液压缸108的输出端连接,并位于所述液压缸108的下表面,所述液压缸108的输出端与所述伸缩杆109连接,并驱动所述伸缩杆109进行伸缩。
再次,所述第一电机110固定安装在所述伸缩杆109的下端;所述第一转动杆111与所述第一电机110的输出端连接,并位于所述第一电机110的下表面,所述第一电机110的输出端与所述第一转动杆111连接,并驱动所述第一转动杆111进行转动。
同时,所述第二电机112固定安装在所述第一转动杆111的下端;所述第二转动杆113的两端分别与所述第二电机112的输出端和所述连接块103连接,所述第二转动杆113位于所述第二电机112和所述连接块103之间,所述第二电机112的输出端与所述第二转动杆113连接,并驱动所述第二转动杆113进行转动,从而带动所述连接块103沿着所述第二转动杆113的轴线进行竖直转动。
另外,所述滑动板114固定安装在所述插销107的上表面;所述活动杆115固定安装在所述滑动板114的上表面,并贯穿所述连接块103和所述固定板106;所述连接弹簧116的两侧分别与所述固定板106和所述滑动板114固定连接,所述连接弹簧116套设在所述活动杆115的外侧,所述连接块103的滑槽的上端设置有通孔,所述活动杆115贯穿所述连接块103的通孔并可在所述连接块103的通孔内进行竖向滑动,所述连接弹簧116上带有阻尼器,当所述连接弹簧116产生伸缩晃动时,所述连接弹簧116上的阻尼器会产生阻止所述连接弹簧116伸缩晃动的阻尼力,从而使得所述连接弹簧116的晃动会最终停止,不会一直晃动,通过所述插销107的向上移动,从而带动所述滑动板114向上移动,进而使得所述连接弹簧116被压缩,由于所述连接弹簧116具有自恢复作用,从而使得当所述连接弹簧116所受到的压缩力消失时,所述连接弹簧116会带动所述滑动板114朝着恢复到原位置的方向进行移动,进而带动所述插销107逐渐恢复到原位置。
最后,所述操作板117固定安装在所述活动杆115的上端;所述拉环118固定安装在所述操作板117的上表面,手握所述拉环118并向上拉动所述拉环118,从而可带动所述操作板117向上移动,进而带动所述活动杆115向上移动,通过所述活动杆115的向上移动,从而使得所述滑动板114向上移动,进而使得所述插销107向上移动。
使用本实施例的一种垃圾焚烧发电厂焚烧炉投料口投料口物料识别系统时,在安装时,将所述滑动块104与所述连接块103的凹槽对齐后将所述滑动块104推入到所述连接块103的凹槽内,从而使得所述滑动块104在所述连接块103的凹槽内进行横向移动,此时在推力的作用下,所述滑动块104可将所述插销107向上挤压,从而带动所述滑动板114向上移动,进而使得所述连接弹簧116被压缩,当所述滑动块104的定位槽移动到所述插销107正对的位置时,所述连接弹簧116所受到的压缩力消失,由于所述连接弹簧116具有自恢复作用,使得所述连接弹簧116会带动所述滑动板114朝着恢复到原位置的方向进行移动,从而带动所述插销107向下移动,进而使得所述插销107可插入到所述滑动块104的定位槽内,通过将所述插销107插入到所述滑动块104的定位槽内,使得所述滑动块104在所述连接块103的凹槽内限位固定,从而使得所述摄像头105在所述连接块103上的位置被限位固定,实现对所述摄像头105进行安装,之后启动所述液压缸108,使得所述液压缸108的输出端输出的动力驱动所述伸缩杆109进行伸缩,从而带动所述第一电机110进行上下移动,进而带动所述摄像头105进行上下移动,启动所述第一电机110,使得所述第一电机110的输出端输出的动力驱动所述第一转动杆111进行转动,从而带动所述第二电机112沿着所述第一转动杆111的轴线进行水平转动,进而带动所述摄像头105沿着所述第一转动杆111的轴线进行水平转动,启动所述第二电机112,使得所述第二电机112的输出端输出的动力驱动所述第二转动杆113进行转动,从而带动所述连接块103沿着所述第二转动杆113的轴线进行竖直转动,进而带动所述摄像头105沿着所述第二转动杆113的轴线进行竖直转动,结合所述摄像头105的上下移动和沿着所述第一转动杆111的轴线进行水平转动,从而使得所述摄像头105可对所述焚烧炉101的所述投料口119进行全方位的监测,在拆卸时,手握所述拉环118并向上拉动所述拉环118来带动所述操作板117向上移动,从而带动所述活动杆115向上移动,进而带动所述滑动板114向上移动,通过所述滑动板114的向上移动来带动所述插销107向上移动,从而使得所述插销107可从所述滑动块104的定位槽内滑出,进而使得所述滑动块104在所述连接块103的凹槽内的固定状态被解除,通过将所述滑动块104在所述连接块103的凹槽内的固定状态进行解除,从而使得所述摄像头105在所述连接块103上的固定状态被解除,之后横向移动所述摄像头105,让所述滑动块104从所述连接块103的凹槽内滑出,从而可将所述摄像头105取下,实现对所述摄像头105进行拆卸,通过对所述摄像头105进行安装或拆卸,从而可在所述摄像头105出现故障时将所述摄像头105拆卸下来对所述摄像头105进行维修,通过使用所述摄像头105对所述投料口119状态信息进行采集,从而能够对垃圾抓斗抓取垃圾料的多少及与所述投料口119的相对投料位置进行自动判断,进而避免了现场员工视觉疲劳后出现误判而导致出现所述投料口119被堵塞而无法吞料的情况。
第三实施例:
在第二实施例的基础上,请参阅图5,图5是第三实施例的垃圾焚烧发电厂焚烧炉投料口投料口物料识别系统的遮挡组件的结构示意图,本发明提供一种垃圾焚烧发电厂焚烧炉投料口投料口物料识别系统还包括遮挡组件,所述遮挡组件包括第三电机201、连接杆202和遮挡板203。
在本实施方式中,所述遮挡组件位于所述焚烧炉101靠近所述摄像头105的一侧,用于对所述焚烧炉101的所述投料口119进行遮挡防护,以便于在不使用所述焚烧炉101时能够对所述焚烧炉101的所述投料口119完全遮挡住。
其中,所述第三电机201固定安装在所述焚烧炉101靠近所述摄像头105的一侧;所述连接杆202与所述第三电机201的输出端连接,并位于所述第三电机201远离所述焚烧炉101的一侧;所述遮挡板203固定安装在所述连接杆202的外侧,所述第三电机201的输出端与所述连接杆202连接,并驱动所述连接杆202进行转动,从而带动所述遮挡板203沿着所述连接杆202的轴线进行竖直转动。
使用本实施例的一种垃圾焚烧发电厂焚烧炉投料口投料口物料识别系统时,在使用所述焚烧炉101时,启动所述第三电机201,使得所述第三电机201的输出端输出的动力驱动所述连接杆202进行转动,从而带动所述遮挡板203沿着所述连接杆202的轴线进行竖直转动,当所述遮挡板203将所述焚烧炉101的所述投料口119完全暴露出来时,可将垃圾从所述焚烧炉101的所述投料口119投入到所述焚烧炉101内,实现垃圾的焚烧发电,在不使用所述焚烧炉101时,让所述遮挡板203沿着所述连接杆202的轴线进行竖直转动,当所述遮挡板203将所述焚烧炉101的所述投料口119完全遮挡住时,从而实现对所述焚烧炉101的所述投料口119进行遮挡防护。
以上所揭露的仅为本申请一种或多种较佳实施例而已,不能以此来限定本申请之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本申请权利要求所作的等同变化,仍属于本申请所涵盖的范围。