基于大惯量轮的座位水平姿态自保持轮椅
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及轮椅安全装置领域,尤其涉及一种基于大惯量轮的座位水平姿态自保持轮椅。
背景技术
当前市面上存在的轮椅仅能够保证轮椅在上下坡过程中保证不发生倾仰,通过安全带的形式保证轮椅使用者在上下坡过程中出现下滑的情况。这种形式存在极大的安全隐患,并且对于轮椅使用者来说,舒适性大大降低。一些可以实现类似功能的轮椅,是通过调整轮椅前轮高度实现轮椅水平。
现有技术实现座位平衡存在较大的不便性。
1、姿态调整时间周期过长,轮椅在遇到长坡、陡坡时,不能及时的调整座位姿态,影响使用者感受,存在安全隐患;
2、调整过程设计传感装置、控制装置、电机,需要进行维护;
3、目前已有装置必须增加额外电源实现功能,适用范围小、损耗能源、给轮椅使用者造成不便。
当前大惯量轮已成功应用于航天领域,具有结构简单、成本低、稳定的特点。日常生活中常见的大惯量轮应用,多数集中在自行车、腕力球等方面,大惯量轮在日常生活中还存在很多的应用空白区,发展潜力巨大。尤其是轮椅方面,其特性与轮椅需要的安全、稳定具有高契合度,有很大的研究价值。
发明内容
针对上述现有技术中的不足,本发明提供一种基于大惯量轮的座位水平姿态自保持轮椅,实现轮椅使用者在上坡、下坡过程中保持身体水平,提高轮椅使用的安全性及舒适性。
为了实现上述目的,本发明提供一种基于大惯量轮的座位水平姿态自保持轮椅,包括一轮椅框架、一座板、一椅背、一大惯量轮座位姿态自保持机构和两轮椅轮;所述座板中部可绕一连接杆转动地通过所述连接杆枢接于所述轮椅框架上;所述椅背底部与所述座板固定连接;所述轮椅轮枢接于所述轮椅框架上;所述大惯量轮座位姿态自保持机构连接于所述座板、一所述轮椅轮与所述轮椅框架之间。
优选地,还包括连接于所述轮椅框架的一前限位杆和一后限位杆;所述前限位杆设置于所述座板的前部下方并对所述座板限位;所述后限位杆设置于所述座板的后部下方并对所述座板限位。
优选地,所述大惯量轮座位姿态自保持机构包括一飞轮装置、一锥齿轮、一伞齿轮、一传动轴、一同心轴、一皮带和两固定板;所述飞轮装置包括一外壳和设置于所述外壳内的一飞轮和一棘轮,所述锥齿轮通过所述棘轮与所述飞轮传动连接;所述固定板固定于所述轮椅框架并位于所述座板下方的两侧;所述传动轴的两端分别通过一轴承枢接于两所述固定板之间;所述伞齿轮设置于所述传动轴的中部并与所述锥齿轮啮合;所述同心轴一端连接一所述轮椅轮的中心,所述同心轴的另一端与所述轮椅框架枢接;所述同心轴与所述传动轴通过所述皮带传动连接。
本发明由于采用了以上技术方案,使其具有以下有益效果:
通过飞轮装置的采用,利用大惯量轮的力学原理实现轮椅座位的水平稳定。具有结构简单、稳定、安全性高、成本低、节约能源的优点,解决了目前市面上轮椅在上下坡过程中座位倾斜造成的安全性问题,同时设置棘轮,防止出现轮椅轮子转速带不动飞轮反而被飞轮带动的情况,进一步的保障安全性。
附图说明
图1为本发明实施例的基于大惯量轮的座位水平姿态自保持轮椅的俯视图;
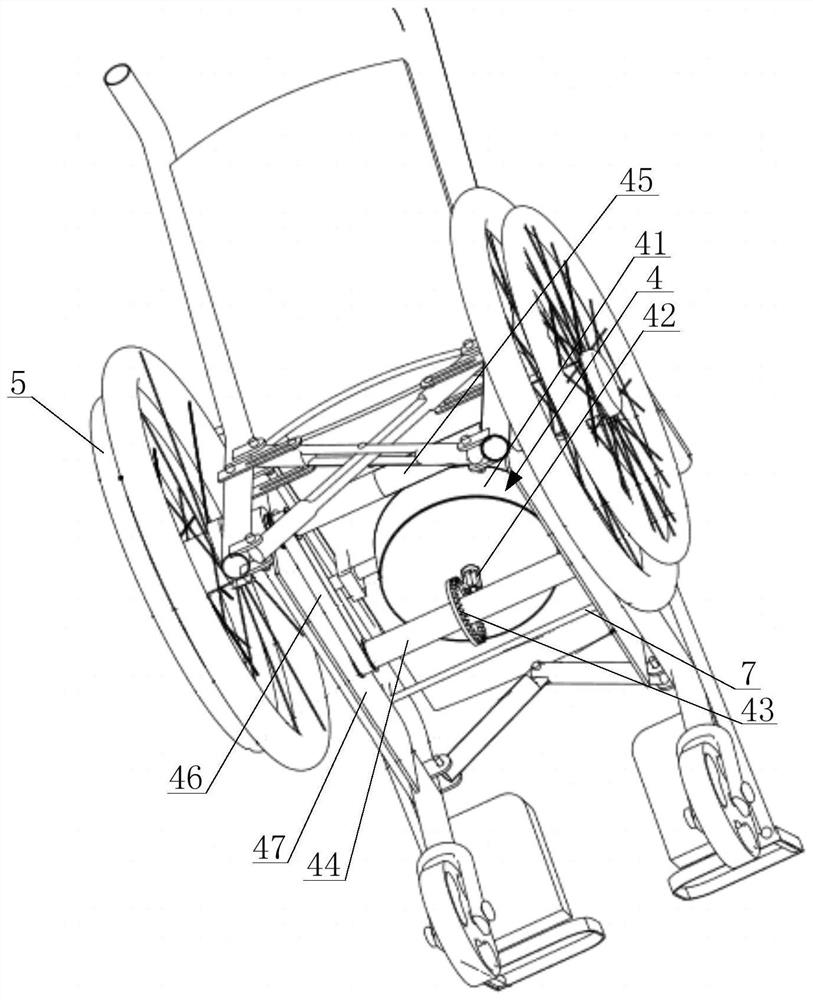
图2为本发明实施例的基于大惯量轮的座位水平姿态自保持轮椅的第一方向的立体图;
图3为本发明实施例的基于大惯量轮的座位水平姿态自保持轮椅的第二方向的立体图。
具体实施方式
下面根据附图1~图3,给出本发明的较佳实施例,并予以详细描述,使能更好地理解本发明的功能、特点。
请参阅图1~图3,本发明实施例的一种基于大惯量轮的座位水平姿态自保持轮椅,包括一轮椅框架1、一座板2、一椅背3、一大惯量轮座位姿态自保持机构4和两轮椅轮5;座板2中部可绕一连接杆6转动地通过连接杆6枢接于轮椅框架1上;椅背3底部与座板2固定连接;轮椅轮5枢接于轮椅框架1上;大惯量轮座位姿态自保持机构4连接于座板2、一轮椅轮5与轮椅框架1之间。
还包括连接于轮椅框架1的一前限位杆7和一后限位杆8;前限位杆7设置于座板2的前部下方并对座板2限位;后限位杆8设置于座板2的后部下方并对座板2限位。前限位杆7和后限位杆8防止座板2翻转角度过大,造成安全隐患。
大惯量轮座位姿态自保持机构4包括一飞轮装置41、一锥齿轮42、一伞齿轮43、一传动轴44、一同心轴45、一皮带46和两固定板47;飞轮装置41包括一外壳和设置于外壳内的一飞轮和一棘轮,锥齿轮42通过棘轮与飞轮传动连接;固定板47固定于轮椅框架1并位于座板2下方的两侧;传动轴44的两端分别通过一轴承48枢接于两固定板47之间;伞齿轮43设置于传动轴44的中部并与锥齿轮42啮合;同心轴45一端连接一轮椅轮5的中心,同心轴45的另一端与轮椅框架1枢接;同心轴45与传动轴44通过皮带46传动连接。
飞轮装置41的外壳通过焊接的方式连接在座板2下方,可实现座板2的稳定平衡。同心轴45与相连的一轮椅轮5同步转动。
当轮椅前进时,轮椅轮5转动,通过同心轴45,将前进的动能转化为同心轴45转动的动能。
同心轴45转动,通过皮带46,带动转动轴转动。
传动轴44上的伞齿轮43转动,通过啮合传动,实现锥齿轮42转动。
锥齿轮42通过棘轮与飞轮连接,棘轮带动飞轮转动,实现座位稳定平衡。
由于棘轮的特性,只能单向传动,当轮椅停止运动时,飞轮的转动不会使连接的锥齿轮42转动。故不会对轮椅造成影响,避免了轮椅轮5转速带不动飞轮反而被飞轮带动的情况的发生,进一步提高本发明装置的安全性。同时能够实现在轮椅停止状态下的座板2平衡。
现有轮椅姿态调整时间周期过长问题,本发明采用大惯量轮技术,随着轮椅的前进,通过皮带46传动的方式,在轮椅行进的过程中时刻保证轮椅座位的水平。不存在姿态调整过程,提高轮椅安全性、轮椅使用者的舒适性。
现有装置需要定期维护问题,本发明的装置由纯机械结构组成,没有加入电气系统,使用寿命大大提高,同时保障了使用过程中的稳定性,避免了因为电气故障造成的意外情况,提高轮椅的使用寿命、提高安全性。
本发明实施例的一种基于大惯量轮的座位水平姿态自保持轮椅不需要额外电源,通过皮带46、齿轮的传送机构,将轮椅前进产生的动能传动到飞轮机构上,使飞轮运转,实现座位姿态稳定。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 基于大惯量轮的座位水平姿态自保持轮椅
- 基于大惯量轮的座位水平姿态自保持轮椅