机械手臂系统及机械手臂控制方法
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及一种机械式手臂系统,特别涉及具有分散式控制系统的机械式手臂系统及其控制方法。
背景技术
随着机械式手臂系统的技术发展,机械式手臂系统已经广泛地运用于工业界及制造业等。为了应付未来工业4.0的需求,机械式手臂系统的精准度及运用范围等需求也逐渐地提高。
然而,目前的机械式手臂系统过度仰赖中央处理系统(例如:中央处理单元或中央控制单元等)执行各种运算。随者制造业的需求提高,所以目前的机械式手臂系统都具有多个手臂轴的设计。由于具有多个手臂轴的机械式手臂系统的每一个手臂轴的运算不尽相同,所以机械式手臂系统的中央处理系统负担的运算量将越来越重,以至于中央处理系统可能因运算量过大而无法负担。
另外,目前的机械式手臂系统的每一手臂轴都具有处理器(或控制单元、控制芯片、其他控制装置)等。由于中央处理系统负责大部分机械式手臂系统的运算,所以每一手臂轴中的处理器常常处于闲置状态。如此一来,目前的机械式手臂系统的控制方法容易造成硬件资源的浪费及成本提高。此外,由于中央处理系统负责大部分机械式手臂系统的运算,所以中央处理系统也难以额外负责其他功能。也就是说,目前的机械式手臂系统的架构难以进行更广泛的应用及设计。
发明内容
有鉴于此,本发明提出一种具有分散式控制系统的机械式手臂系统。通过每一个手臂轴的控制装置进行独立地计算各轴的运算,减轻中央处理系统的运算负担。如此一来,本发明的机械式手臂系统可以最大化地利用硬件资源、减轻成本及增加应用的范围。
一种机械手臂系统包括至少两个手臂轴、至少两个控制装置及至少两个马达装置,其中所述控制装置分别控制所对应的所述马达装置以分别调整所对应的所述手臂轴的位置。其中每一所述控制装置包括:第一控制单元、机械手臂控制单元、驱动单元及测量处理单元。第一控制单元接收末端位置命令以输出第一转矩信号。机械手臂控制单元包括刚性机械单元及模型机械单元。刚性机械单元接收第一转矩信号并运行刚性机械模型以取得刚性机械转矩。模型机械单元接收刚性机械转矩并运行挠性机械模型以建立机械手臂模型以取得目标转矩,并且依据目标转矩输出目标位置信号。驱动单元依据该目标位置信号产生驱动信号以调整所对应的马达装置的旋转角度。测量处理单元用以测量所对应的马达装置的旋转角度、旋转速度及旋转加速度。其中至少两个控制装置的一者的机械手臂控制单元中的刚性机械单元接收至少两个控制装置的其他者所对应的所述马达装置的旋转角度、旋转速度及旋转加速度,以调整刚性机械模型以改变刚性机械转矩。
一种机械手臂系统包括一手臂轴、耦接于该手臂轴的一马达装置及耦接于该马达装置的一控制装置。该控制装置包括:第一控制单元、机械手臂控制单元、驱动单元及测量处理单元。第一控制单元接收末端位置命令信号以输出第一转矩信号。机械手臂控制单元包括刚性机械单元及模型机械单元。刚性机械单元接收第一转矩信号并运行刚性机械模型以取得刚性机械转矩。模型机械单元接收刚性机械转矩并运行挠性机械模型以建立机械手臂模型以取得目标转矩,并且依据该目标转矩输出目标位置信号。驱动单元依据目标位置信号产生驱动信号以调整马达装置的旋转角度。测量处理单元用以测量马达装置以输出马达装置的运动参数,其中运动参数包括旋转角度、旋转速度及旋转加速度。刚性机械单元接收马达装置的运动参数以调整刚性机械模型以改变刚性机械转矩。
一种机械手臂控制方法由机械手臂系统所执行。机械手臂系统包括至少两个手臂轴、至少两个控制装置及至少两个马达装置。所述控制装置分别控制所对应的所述马达装置以分别调整所对应的所述手臂轴的位置。其中每一所述控制装置执行该机械手臂控制方法包括以下步骤:接收末端位置命令信号以输出第一转矩信号。接收第一转矩信号并运行刚性机械模型以取得刚性机械转矩。接收刚性机械转矩并运行挠性机械模型以建立机械手臂模型以取得目标转矩。依据目标转矩输出目标位置信号。依据目标位置信号产生驱动信号以调整所对应的马达装置的旋转角度。测量所对应的该马达装置的旋转角度、旋转速度及旋转加速度。其中至少两个控制装置的一者接收至少两个控制装置的其他者所对应的所述马达装置的旋转角度、旋转速度及旋转加速度,以调整刚性机械模型以改变刚性机械转矩。
附图说明
图1所示为根据现有技术的一实施例的机械手臂系统的架构图。
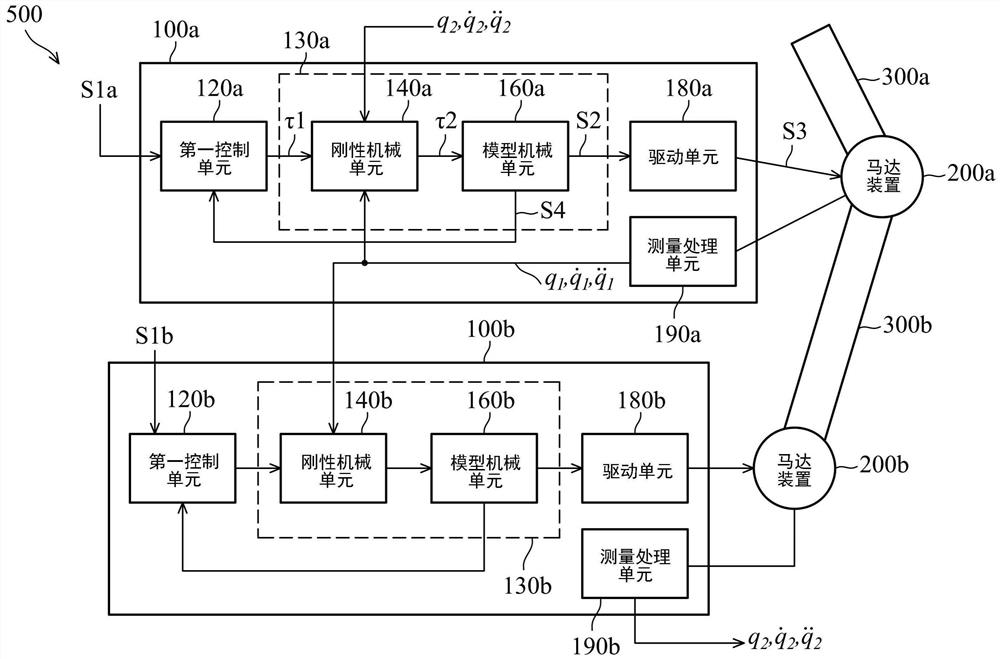
图2所示为根据本发明的一实施例的机械手臂系统的架构图。
图3所示为根据本发明的一实施例的机械手臂系统中的机械手臂控制单元的架构图。
图4所示为根据本发明的其他一些实施例的机械手臂系统的架构图。
图5所示为根据本发明的其他一些实施例的机械手臂系统的架构图。
图6所示为根据本发明的一实施例的机械手臂系统的控制方法的流程图。
附图标记说明:
400a:中央控制单元
400b:手臂轴的控制装置
401b~403b:第一至第三手臂轴控制装置
500、600、800:机械式手臂系统
100a、100b:控制装置
120a、120b:第一控制单元
140a、140b、740:刚性机械单元
160a、160b:模型机械单元
180a、180b:驱动单元
182a:第二控制单元
184a:驱动电路
190a、190b:测量处理单元
200a、200b:马达装置
300a、300b:手臂轴
C1:运动控制命令
C2:每一手臂轴的转矩命令
C3:每一手臂轴的马达电流命令
S1、S1a、S1b:末端位置命令
S2:目标位置信号
S3:驱动信号
F1:第一转矩信号
τ1:第一转矩信号
τ2:刚性机械转矩
τ3:第二转矩信号
q
Δθ:第一误差范围
900:控制方法
905~955:步骤
具体实施方式
参考附图来描述本发明,其中在所有附图中使用相同的附图标记来表示相似或等效的元件。附图不是按比例绘制的,而是仅用于说明本发明。本发明的几个形态如下描述,并参考示例应用作为说明。应该理解的是,阐述了许多具体细节、关系和方法以提供对本发明的全面了解。然而,相关领域的普通技术人员将容易认识到,本发明可以被实行即便在没有一个或多个具体细节的情况下或没有利用其他方法来实施本发明。在其他情况下,未详细示出现有的结构或操作以避免模糊本发明。本发明不受所示的行为或事件的顺序所限制,因为一些行为可能以不同的顺序发生和/或与其他行为或事件同时发生。此外,并非所有说明的行为或事件都需要根据本发明的方法来实施。
以下说明是本发明的实施例。其目的是要举例说明本发明的一般性的原则,不应视为本发明的限制,本发明的范围当以权利要求所界定者为准。
图1所示为根据现有技术的一实施例的机械手臂系统400的架构图。如图1所示,在传统的机械手臂系统400中,当中央控制单元接收运动控制命令C1时,中央控制单元400a依据运动控制命令C1进行每一个手臂轴运动的计算,并且输出每一手臂轴的转矩命令C2给手臂轴的控制装置400b。在手臂轴的控制装置400b中至包括多个手臂控制装置,例如:第一至第三手臂控制装置401b~403b。第一至第三手臂控制装置401b~403b根据每一手臂轴的转矩命令C2输出每一手臂轴的马达电流命令C3,以驱动每一手臂轴的马达装置。然后,手臂轴的控制装置400b检测每一手臂轴的运动状态。中央控制单元400a通过手臂轴的控制装置400b接收每一个手臂轴的运动状态C4。由此可知,传统的机械手臂系统400主要由中央控制单元400a负担每一个手臂轴的运算。
传统的机械手臂系统400明显地没有善用每一个手臂轴的控制装置400b的硬件资源。另外,由于现在市场上的需求多样化,机械手臂系统的手臂轴数量需要更有弹性的调整。然而,因为传统的机械手臂系统400的中央控制单元400a的硬件资源有限,所以无法让传统的机械手臂系统400能够被更有弹性地设计。另外,如图1所示,由于转矩命令C2及手臂轴的运动状态C4的传送路径繁复且冗长,所以容易造成数据的延迟。因此,中央控制单元的计算结果难以实时反映机械手臂系统的实际运动状态。
此外,传统的机械手臂系统400的控制方法也较不适用于具有挠性的机械手臂。具有挠性的机械手臂在移动的过程中,机械手臂的末端位置会产生震荡现象。传统的机械手臂系统400由于数据延迟的故,难以反应高频率手臂轴的末端位置的震荡现象,所以传统的机械手臂系统400的精准度难以提升。
图2所示为根据本发明的一实施例的机械手臂系统500的架构图。如图2所示,机械手臂系统500包括至少两个手臂轴(300a及300b)、至少两个控制装置(100a及100b)及至少两个马达装置(200a及200b)。其中,所述控制装置分别控制所对应的所述马达装置以分别调整所对应的所述手臂轴的位置。也就是说,于此实施例中,控制装置100a控制马达装置200a,以调整手臂轴300a的位置。控制装置100b控制马达装置200b,以调整手臂轴300b的位置。特别注意的是,在此实施例中,图2所示出的手臂轴、控制装置及马达装置的数量仅用于说明本发明,但本发明不限于此。
机械手臂系统500中的每一个控制装置(100a及100b)包括:第一控制单元(120a或120b)、机械手臂控制单元(130a或130b)、驱动单元(180a或180b)及测量处理单元(190a或190b)。于此实施例中,控制装置100a包括:第一控制单元120a、机械手臂控制单元130a、驱动单元180a及测量处理单元190a,并且机械手臂控制单元130a还包括刚性机械单元140a及模型机械单元160a。控制装置100b包括:第一控制单元120b、机械手臂控制单元130b、驱动单元180b及测量处理单元190b,并且机械手臂控制单元130b还包括刚性机械单元140b及模型机械单元160b。以下将详述机械手臂系统500的操作方法。
于此实施例中,由于控制装置100a及100b的架构及操作方法相同,因此本发明仅说明控制装置100a的操作方法,并且不另外赘述控制装置100b的操作方法。
在图2中,当控制装置100a中的第一控制单元120a接收末端位置命令S1a以输出第一转矩信号τ1。其中,本领域的普通技术人员可以了解第一控制单元120a具有速度控制器(未图示)及位置控制器(未图示)等。因此,第一控制单元120a可以依据末端位置命令S1a取得目标旋转角度,并且通过速度控制器及位置控制器,分别计算出目标旋转加速度及目标旋转速度。也就是说,于一些实施例中,第一控制单元120a输出的第一转矩信号τ1包括目标旋转角度、目标旋转速度及目标旋转加速度。由于本领域的普通技术人员可以了解第一控制单元120a的操作原理,故本发明不再赘述。
机械手臂控制单元130a中的刚性机械单元140a具有一刚性机械方程式。当刚性机械单元140a接收来自第一控制单元120a的第一转矩信号τ1时,刚性机械单元140a会依据第一转矩信号τ1的目标旋转角度、目标旋转速度及目标旋转加速度运行刚性机械方程式以建立刚性机械模型。刚性机械单元140a完成刚性机械模型之后,刚性机械单元140a依据刚性机械模型计算出刚性机械转矩τ2,并且传送刚性机械转矩τ2至机械手臂控制单元130a中的模型机械单元160a。
模型机械单元160a接收刚性机械转矩τ2(及/或其他马达装置,例如:马达装置200b,的旋转角度及旋转速度),并且运行挠性机械方程式以建立机械手臂模型。模型机械单元160a完成机械手臂模型之后,模型机械单元160a依据机械手臂模型计算出目标转矩。然后,模型机械单元160a依据目标转矩输出目标位置信号S2给驱动单元180a。驱动单元180a依据目标位置信号S2输出驱动信号S3给对应于控制装置100a的马达装置200a,以调整马达装置200a的旋转角度以改变对应于控制装置100a的手臂轴300a的位置。
当驱动单元180a依据目标位置信号S2调整马达装置200a的旋转角度时,控制装置100a中的测量处理单元190a会测量与计算马达装置200a的运动参数,包括旋转角度q
特别注意的是,于此实施例中,由于本发明仅示出控制装置100a及100b作为范例,所以测量处理单元190a输出旋转角度q
于此实施例中,刚性机械单元140a接收马达装置200a的运动参数(旋转角度q
此时,模型机械单元160a依据已改变的目标转矩输出第一反馈信号S4给第一控制单元120a。当第一控制单元120a判断末端位置命令S1a及第一反馈信号S4的相差没有落入第一误差范围时,第一控制单元120a调整第一转矩信号τ1的大小给刚性机械单元140a。在一些实施例中,第一误差范围介于0~5%。
刚性机械单元140a根据已调整的第一转矩信号τ1重新运行刚性机械方程式以调整刚性机械模型,使得刚性机械转矩τ2被改变。在一些实施例中,当第一控制单元120a依据第一误差范围改变第一转矩信号τ1给刚性机械单元140a时,刚性机械单元140a依据已调整的第一转矩信号τ1中的目标旋转角度、目标旋转速度及目标旋转加速度运行刚性机械方程式以改变刚性机械转矩τ2。
模型机械单元160a再依据被改变的刚性机械转矩τ2输出目标位置信号S2给驱动单元180a以调整马达装置200a的旋转角度。然后测量处理单元190a再测量马达装置200a的运动参数(旋转角度q
于一些实施例中,本发明所提的刚性机械单元(140a、140b)及模型机械单元(160a、160b)分别可以是具有运算功能的组件,例如:中央处理单元(CPU)、控制器、处理器、控制芯片等,但本发明不限于此。在其他一些实施例中,机械手臂控制单元(130a、130b)可以是具有运算功能的组件,例如:中央处理单元(CPU)、控制器、处理器、控制芯片等,并且刚性机械单元(140a、140b)及模型机械单元(160a、160b)可以是设置于机械手臂控制单元(130a、130b)中的固件或软件,但本发明不限于此。
由此可知,在本发明中,机械手臂系统500中的机械手臂控制单元130a及130b扮演核心的角色。以下将详述机械手臂控制单元130a及130b的操作原理及方法。
图3所示为根据本发明的一实施例的机械手臂系统500中的机械手臂控制单元130a的架构图。在本发明中,由于机械手臂控制单元130a及130b的操作方法及原理相同,因此本发明仅说明机械手臂控制单元130a的操作原理,并且不另外赘述机械手臂控制单元130b。以下请同时参照图2及图3,以说明本发明的实施例。
在机械手臂控制单元130a中,当刚性机械单元140a接收来自第一控制单元120a的第一转矩信号τ1时,刚性机械单元140a会依据第一转矩信号τ1的目标旋转角度、目标旋转速度及目标旋转加速度运行刚性机械方程式以建立刚性机械模型。其中刚性机械方程式如下计算式(1)所示:
在计算式(1)中,其中M、C、G及F皆为矩阵。矩阵M(q)
在图3中,刚性机械单元140a首先将第一转矩信号τ1的目标旋转角度、目标旋转速度及目标旋转加速度代入刚性机械方程式(如计算式(1)所示),以取得刚性机械模型,而后取得刚性机械转矩τ2。
于一些实施例中,当刚性机械单元140a初次接收第一转矩信号τ1时,测量处理单元190a还没有输出马达装置200a的运动参数(旋转角度q
模型机械单元160a接收刚性机械转矩τ2以输出目标位置信号S2给驱动单元180a,使得马达装置200a及200b开始旋转。当马达装置200a及200b开始旋转时,测量处理装置190a及190b开始输出马达装置200a及200b的运动参数。
由于本发明的机械手臂系统500具有至少两个手臂轴(例如:300a及300b),所以机械手臂控制单元130a除了计算马达装置200a的运动参数,还需要同时计算马达装置200b的运动参数(旋转角度q
因此,在图3中,矩阵M
于此实施例中,马达装置200a的惯性常数I
然后,根据计算式(1),刚性机械单元140a将第一惯性力(矩阵
在一实施例中,模型机械单元160a包括挠性机械模型及机械手臂模型,其中模型机械单元160a建立挠性机械模型及机械手臂模型的方法详述如下。在模型机械单元160a中,当模型机械单元160a接收来自刚性机械单元140a的刚性机械转矩τ2时,模型机械单元160a通过挠性机械方程式以取得挠性机械转矩。其中挠性机械方程式如下计算式(2)所示:
本领域的普通技术人员可依据文献1(C.Sun,W.He,and J.Hong,“Neural NetworkControl of a Flexible Robotic Manipulator Using the Lumped Spring-MassModel,”IEEE Transactions on Systems,Man,and Cybernetics),进行运算以取得计算式(2)。
在计算式(2)中,ξ代表为手臂轴(300a或300b)的末端位置的偏移角度,并且
于此实施例中,模型机械单元160a可依据计算式(3)建立机械手臂模型。然后,模型机械单元160a可以将计算式(3)进行移项及积分,即可以取得计算式(4)如下:
接者,对计算式(4)进行积分即可以取得计算式(5),并且对计算式(5)进行积分即可以取得计算式(6)。
当刚性机械单元140a依据第一转矩信号τ1输出刚性机械转矩τ2时,模型机械单元160a可以通过计算式(6)由目标转矩取得目标位置,并输出目标位置信号S2给驱动单元180a。
另外,通过计算式(3)~(6),机械手臂控制单元130a依据马达装置200a及200b的运动参数计算出手臂轴300a的位置(或马达装置200a的旋转角度)。然后,模型机械单元160a依据手臂轴300a的位置(或马达装置200a的旋转角度)输出第一反馈信号S4给第一控制单元120a。也就是说,刚性机械单元140a接收马达装置200a及200b的运动参数后,运行计算式(1)并输出刚性机械转矩τ2给模型机械单元160a。模型机械单元160a接收刚性机械转矩τ2后,运行计算式(3)~(6)取得手臂轴300a的位置(或马达装置200a的旋转角度)。然后,模型机械单元160a依据手臂轴300a的位置输出第一反馈信号S4给第一控制单元120a。
当第一控制单元120a判断末端位置命令S1a及第一反馈信号S4的相差没有落入第一误差范围Δθ时,第一控制单元120a调整第一转矩信号τ1的大小给刚性机械单元140a。此时,刚性机械单元140a重复执行上述的操作方法。
图4所示为根据本发明的其他一些实施例的机械手臂系统600的架构图。于此实施例中,由于测量处理单元190a及190b分别被设置于马达装置200a及200b中,故没有示出于图4中。另外,图4中,马达装置200b被设置为控制机械手臂系统600的手臂轴300b,并且手臂轴300b位于机械手臂系统600的末端位置。在实际应用中,由于手臂轴300b位于机械手臂系统600的末端位置,所以手臂轴300b都会被安装末端效应器(end effector),例如:机械夹爪等。于此实施例中,第一控制单元(120a及120b)、刚性机械单元140a、模型机械单元(160a及160b)的操作原理及方法,已详述于前,故不在此赘述。
于此实施例中,由于马达装置200b用于控制位于机械手臂系统600的末端位置的手臂轴300b,所以马达装置200b的控制可部分忽略马达装置200a及手臂轴300a的运动参数。因此刚性机械单元140b中的刚性机械方程式中的部分矩阵不同于刚性机械单元140a。
承上所述,刚性机械单元140b中的第一惯性力(矩阵M
另外,在刚性机械单元140b中,矩阵
于此实施例中,刚性机械单元140a及刚性机械单元140b中的科氏力(矩阵C1及C2)参考的参数相同,包括旋转角度q
于此实施例中,驱动单元180a及180b也具有反馈控制系统。由于驱动单元180a及180b的控制方法相同,所以本发明谨说明驱动单元180a的操作方法。
驱动单元180a包括第二控制单元182a及驱动电路184a。第二控制单元182a耦接目标位置信号S2及刚性机械转矩τ2以输出第二转矩信号τ3给驱动电路184a。驱动电路184a依据第二转矩信号τ3输出驱动信号S3。
当该第二控制单元182a判断目标位置信号S2与马达装置200a的旋转角度q
图5所示为根据本发明的其他一些实施例的机械手臂系统800的架构图。在此实施例中,机械手臂系统800包括单一手臂轴300a、耦接于手臂轴300a的马达装置200a及耦接于该马达装置200a的控制装置700。在此实施例中,控制装置700的架构及操作方法相同于图2所示的控制装置100a及100b,故不再此赘述。在各个实施例中,测量处理单元190a可以设置于控制装置700中,或是控制装置700之外,但本发明不限于此。
另外,相同于图3所示的控制装置100a,控制装置700中的刚性机械单元740同样具有刚性机械方程式。然而,由于机械手臂系统700仅具有单一手臂轴,所以不需要考虑其他手臂轴的运动状态。因此,刚性机械单元740中的刚性机械方程式不会有第二惯性力。由于刚性机械单元740中的刚性机械方程式不需要考虑其他手臂轴的运动状态,所以其他马达装置的运动参数也可以忽略。
于此实施例中,第一控制单元120a依据末端位置命令S1输出第一转矩信号τ1。在一开始,刚性机械单元740接收第一控制单元120a输出的第一转矩信号τ1以输出刚性机械转矩τ2。模型机械单元160a接收刚性机械转矩τ2以输出目标位置信号S2给驱动单元180a。驱动单元180a依据目标位置信号S2调整马达装置200a的旋转角度。
测量处理单元190a测量到马达装置200a的运动参数(旋转角度q
在其他一些实施例中,模型机械单元160a依据已调整的刚性机械转矩τ2输出第一反馈信号S4给第一控制单元120a。接着,第一控制单元的操作方法已详述于图2至图4中,故不再赘述。
图6所示为根据本发明的一实施例的机械手臂系统500的控制方法900的流程图。请同时参照图2及图6以说明以下各个实施例。在图6中,控制方法900可以由图2所示的机械系统500的控制装置100a及100b分别执行。于此实施例中,由于控制装置100a及100b操作控制方法900的流程相同,所以本发明谨说明控制装置100a操作控制方法900的流程。
在图6中,控制装置100a由步骤905开始执行。控制装置100a中的第一控制单元120a接收末端位置命令信号S1a,并输出第一转矩信号τ1。于此实施例中,第一转矩信号τ1包括目标旋转角度、目标旋转速度及目标旋转加速度。然后控制装置100a继续执行步骤910。
在步骤910中,控制装置100a中的刚性机械单元140a接收第一转矩信号中的目标旋转角度、目标旋转速度及目标旋转加速度,并且运行刚性机械方程式(计算式(1))以建立刚性机械模型。完成建立刚性机械模型之后,刚性机械单元140a运行刚性机械模型取得一总和以作为刚性机械转矩τ2。然后控制装置100a继续执行步骤915。
在步骤915中,控制装置100a中的模型机械单元160a接收刚性机械转矩τ2。同时,模型机械单元160a运行挠性方程式(计算式(2))以建立挠性机械模型以取得挠性机械转矩。模型机械单元160a将刚性机械转矩τ2及挠性机械转矩相加以取得计算式(3),并通过计算式(3)建立机械手臂模型。模型机械单元160a再通过机械手臂模型取得目标转矩。然后,模型机械单元160a继续执行步骤920。
在步骤920中,模型机械单元160a依据目标转矩输出目标位置信号S2给驱动单元180a。在步骤925中,驱动单元180a依据目标位置信号S2产生驱动信号S3给马达装置200a,以调整马达装制200a的旋转角度。然后控制装置100a继续执行步骤930。
在步骤930中,控制装置100a中的测量处理单元190a测量马达装置200a的旋转角度q
在步骤935中,至少两个控制装置的一者(如控制装置100a)接收至少两个控制装置的其他者(如控制装置100b)所对应的所述马达装置的旋转角度、旋转速度及旋转加速度,例如:马达装置200b的旋转角度q
在步骤940中,调整至少两个控制装置的一者(控制装置100a)的刚性机械模型以改变刚性机械转矩。控制装置100a中的刚性机械单元140a接收马达装置200a及马达装置200b的运动参数,并运行刚性机械方程式(计算式(1))以调整刚性机械模型。刚性机械单元140a再依据已调整的刚性机械模型改变刚性机械转矩τ2的大小给模型机械单元160a。
在步骤945中,模型机械单元160a接收已改变的刚性机械转矩τ2,并且运行计算式(3)以调整机械手臂模型,并且改变目标转矩。模型机械单元160a依据已改变的目标转矩,并运行计算式(6)估算手臂轴300a的位置以输出第一反馈信号S4给第一控制单元120a。
在步骤950中,第一控制单元120a判断末端位置命令S1a及第一反馈信号S4的一相差是否落入第一误差范围。如果该相差没有落入第一误差范围,第一控制单元120a调整第一转矩信号S1给刚性机械单元140a,并且控制装置100a由步骤910开始重复执行接下来的步骤915~950。
在步骤950中,如果该相差落入第一误差范围,第一控制单元120a将维持固定的第一转矩信号S1给刚性机械单元140a。为了简化图6,本发明没有将此步骤示出于图6中。
综上所述,本发明的机械式手臂系统通过各个手臂轴所对应的控制装置(如:控制装置100a及100b)完成机械式手臂系统的操作,并非机械手臂系统中的中央控制器。如此一来,机械手臂系统中的中央控制器(未图示)仅须完成信号传递的功能。例如:中央控制器将控制装置测量到的马达装置的运动参数,传送到其他的控制装置中的刚性机械单元。中央控制器仍具有额外的运算能力,使得中央控制器可以用于更多其他的应用,例如:云端计算、影像处理、网络的连结等。因此,本发明的机械式手臂系统可以应用于更广泛的用途,并且进行更弹性化的设计。
另外,由于本发明充分利用各个手臂轴的处理器(如控制装置100a及100b),本发明也解决硬件资源浪费等问题,并且达到明显的降低成本等优势。
虽然本发明以优选实施例公开如上,然其并非用以限定本发明,任何本领域具有通常技术知识者,在不违背本发明精神和范围的情况下,可做些许变动与替代,因此本发明的保护范围当应视随后所附的权利要求所界定者为准。
本文使用的术语仅用于描述特定实施例,而不旨在限制本发明。如本文所使用的,除非上下文另外明确指出,否则单数形式“一”、“一个”和“该”也包含多个形式。此外,就术语“包括”、“包含”、“具有”或其他变化用法被用于详细描述和/或权利要求,这些术语旨在以类似于术语“包含”的方式具有相同意思。
- 机械手臂控制装置,包含该控制装置的机械手臂系统及机械手臂控制方法
- 机械手臂系统及机械手臂控制方法