基于空间编码的激光雷达标定方法及装置
文献发布时间:2023-06-19 19:21:53
技术领域
本发明涉及的是一种雷达标定领域的技术,具体是一种基于空间编码的激光雷达标定方法及装置。
背景技术
目前固态激光雷达,尤其是固态多波束激光雷达的波束出射角度的标定较为困难且结构复杂,标定标记过程需要额外的环境设置。为了低成本、高效地解决该技术问题,需要发明一种新的激光雷达角度标定方法及装置。
发明内容
本发明针对现有技术存在的上述不足,提出一种基于空间编码的激光雷达标定方法及装置,固定激光雷达与编码板和高反板间的位置关系,更换编码板的空间布局实现空间反射率的编码,通过对激光雷达反射光的强度进行解码得到该束光的出射方向,从而实现激光雷达的标定。
本发明是通过以下技术方案实现的:
本发明涉及一种基于空间编码的激光雷达标定方法,通过将包含编码区、低反区和镂空区的编码板和高反板正对待标定激光雷达设置,使其无偏转时的波束垂直照射至编码板的中心位置以得到雷达与编码板的距离,进而通过重复多次照射具有不同布局的编码板并采集对应反射光强度后,通过对反射光信号进行解码并与对应布局对照,结合雷达与编码板的距离即计算得到方位角。
所述的高反板为具有朗伯特性和反射率大于90%的漫反射板。
所述的编码板,为具有朗伯特性的漫反射板,其上分别设有矩形结构的编码区以及位于编码区内的矩形结构低反区和矩形结构镂空区,低反区的反射率小于5%,镂空区可以直接透光。
技术效果
本发明通过固定激光雷达与编码板和高反板间的位置关系,更换编码板的空间布局实现空间反射率的编码,通过对激光雷达反射光的强度进行解码得到该束光的出射方向,从而实现激光雷达的标定。本发明可由塑料和常见金属材料进行制造,结构简单,操作方便,无需外加电源,并且可以根据使用者对标定精度的需求灵活调整;本发明具有可以实现低成本、短工时、零功耗和高拓展性的激光雷达标定的技术效果,且可以应用于有多个波束同时出射的复杂激光雷达系统。
附图说明
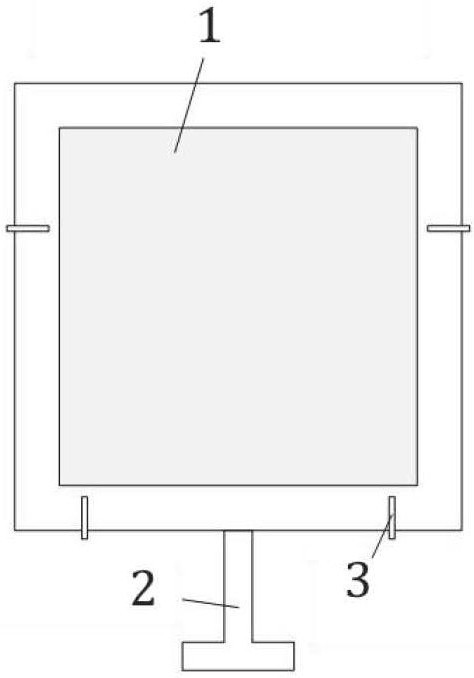
图1为高反板和支架的结构示意图;
图2为高反板和支架的立体示意图;
图3为高反板和支架的剖面结构示意图;
图4为格雷编码板的示意图;
图5为一个格雷编码板的立体示意图;
图6为一个格雷编码板的剖面示意图;
图7为采集对应反射光强度的操作示意图;
图8为对激光雷达进行标定前的准备工作示意图;
图9为本发明的使用原理示意图;
图10为空间编码示意图与空间编码值对照表;
图11为对俯仰角进行标定的原理示意图;
图中:高反板1、底座2、编码板固定装置3、编码区4、低反区5、镂空区6。
具体实施方式
如图1-图11所示,为本实施例涉及一种基于空间编码的激光雷达标定方法,通过将包含编码区4、低反区5和镂空区6的编码板和高反板正对待标定激光雷达设置,使其无偏转时的波束垂直照射至编码区4的中心位置以得到雷达与编码板的距离d,进而通过重复多次照射具有不同布局的编码板并采集对应反射光强度后,通过对反射光信号进行解码并与对应布局对照,结合雷达与编码板的距离即计算得到方位角。
所述的编码区4、低反区5和镂空区6的剖面结构分别如图6中的A-A、B-B和C-C所示。图6以图5中所示的编码板为例,其余编码板的编码区4的剖面结构根据编码板的不同布局可由图6中的A-A类推,其余编码板的低反区5和镂空区6的剖面结构与图6中的B-B和C-C相同。
所述的不同布局是指:在编码区4内,以自然二进制编码或者格雷编码等编码方式,以低反区为0,镂空区为1,从左至右排布低反区5和镂空区6。
如图7所示,所述的采集对应反射光强度是指:依次手动将编码板1~4竖直向下插入编码板固定装置中,贴放于高反板前,即靠近待标定激光雷达的一侧记录反射光强度,竖直向上将编码板取出,得到反射光强度I
所述的解码是指:对反射光强度I
所述的归一化是指:
所述的阈值化处理是指:当
所述的结合雷达与编码板的距离即计算得到方位角,具体为:基于如图10所示的编码表,从左至右对应的方位角为
优选地,如图11所示,使用正方形的编码板和编码区,因此只需对编码板旋转90°并重复上述步骤即可实现对俯仰角的标定。
经过具体实际实验,设置编码板边长l为0.5米,编码板与激光雷达的距离d为0.5米,标定所使用的编码板的总数量为4,编码板的布局与图4中的布局相同,设置待测激光雷达波束的出射方位角为10°,出射俯仰角为15°。根据前文所述的方式使用上述装置,不对编码板进行90°旋转,能够得到的实验数据是:I
本实施例中空间编码精度与编码板和激光雷达间的距离d有关,d越大,空间编码精度越高,但同时空间编码范围也会变小。为了实现不降低空间编码范围的同时提高空间编码精度,本发明可以增加编码板的数量,只需编码板的设计与更高位数的编码方式匹配即可。11个编码板即可实现对2048×2048个不同出射角的编码,这已经超过了绝大多数固态激光雷达的成像像素个数。
与现有技术相比,本发明利用了空间反射率编码器将空间信息映射至反射光的强度信息上,实现了激光雷达出射角度的标定,带来的性能指标提升在于算法简单、易于使用、工时较短;通过一个高反板和多个具有不同空间分布的编码板实现了空间反射率编码器的功能,无需外加电源,且可以根据对编码精度的需求灵活调整使用的编码板的数量,11个编码板即可实现对2048×2048个不同出射角度的编码,可以满足绝大部分需求,带来的性能指标提升在于结构简单、易于制造、成本较低、零功耗、拓展性强。
上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。
- 一种三维固态面阵激光雷达标定装置及方法
- 激光雷达与相机之间的标定方法、装置、设备及存储介质
- 基于三个标定板的激光雷达与双目相机空间关系确定方法
- 基于平面和空间特征的激光雷达与相机自动联合标定方法