一种用于二维材料转移的基底及二维材料转移装置
文献发布时间:2023-06-19 19:37:02
技术领域
本申请属于二维材料等半导体薄膜材料加工制备技术领域,具体涉及一种用于二维材料转移的基底及二维材料转移装置。
背景技术
二维材料是指电子仅可在两个维度的纳米尺度上自由运动(平面运动)的材料,如纳米薄膜、超晶格、量子阱。二维材料因自身优异的理化特性,使其在电子、光电及传感领域都具备巨大的应用潜力,如今,二维材料已然成为了产业与学术的“宠儿”。
在对二维材料进行光刻、刻蚀等工艺前需将其从生长基底转移至目标衬底上。但目前产业上相关工艺与装置严重缺失,现有的方案多为实验室用于实验的转移方法,转移效率低且转移面积小,易损坏二维材料,无法实现产业上所需的高效率、晶圆级的转移。
发明内容
本申请实施例提供一种用于二维材料转移的基底,能够解决二维材料转移效率低的技术问题,可以实现二维材料的大面积转移。
本申请实施例提供一种二维材料转移装置,能够解决二维材料转移效率低、工业化程度低的技术问题,可以实现二维材料的高精度堆叠和高精度的多次转移。
一方面,本申请实施例提供一种基底,包括依次层叠设置的基底层、牺牲层和二维材料层,牺牲层用于在能量源的作用下蒸发。
根据本申请第一方面的实施方式,牺牲层为光敏材质或者低熔沸点材质。
根据本申请第一方面前述任一实施方式,基底层为高透光率硬质材质或导热材质,或基底层的材质包括石英或者硅。
第二方面,本申请实施例提供一种二维材料转移装置,包括
第一承载模块,用于承载如上述的基底,
第二承载模块,用于承载目标衬底;
第一承载模块可带动基底移动至贴合工位以使基底的二维材料层与目标衬底贴合,和/或,第二承载模块可带动目标衬底移动至贴合工位以使基底的二维材料层与目标衬底贴合;
能量源,用于产生能使牺牲层蒸发的能量,从而使位于贴合工位的二维材料层与基底层分离。
根据本申请第二方面的实施方式,装置还包括用于产生真空环境的真空箱,贴合工位位于真空箱内,
第一承载模块可在真空箱外部与真空箱内部之间运送基底,
第二承载模块可在真空箱外部与真空箱内部之间运送目标衬底。
根据本申请第二方面前述任一实施方式,装置还包括用于承载能量源的第三承载模块。
根据本申请第二方面前述任一实施方式,能量源是光源,光源能够发出宽光谱脉冲光。
根据本申请第二方面前述任一实施方式,第三承载模块与真空箱相邻设置,真空箱的与第一承载模块相邻的侧壁设有可透过光线的透光区域,承载在第三承载模块上的光源发出的光能够透过透光区域照射到真空箱内部。
根据本申请第二方面前述任一实施方式,第一承载模块包括用于将基底运送至贴合工位的第一移动组件,第一移动组件上具有用于吸附基底的第一吸附面,第一吸附面朝向第二承载模块所在的方向。
根据本申请第二方面前述任一实施方式,第一承载模块包括第一载台,第一载台用于为第一移动组件提供移动轨道,第一移动组件沿着移动轨道在真空箱内外之间移动,
或
第一承载模块包括第一载台,第一载台用于为第一移动组件提供转轴,第一移动组件绕着转轴转动以在真空箱内外之间移动。
根据本申请第二方面前述任一实施方式,在第一承载模块上设置有多组用于检测基底层与目标衬底之间的距离的光纤组件。
根据本申请第二方面前述任一实施方式,在第一承载模块上设置的光纤组件的数量至少为3组,每组光纤组件包括光纤束,光纤束包括用于向基底层和目标衬底发射光线的发射光纤和用于接收经基底层和目标衬底反射的反射光线的接收光纤。
根据本申请第二方面前述任一实施方式,每组光纤组件还包括光纤折射镜,光纤折射镜用于改变光纤束的光路以使从发射光纤发出的光线经基底层和目标衬底反射后能够被接收光纤接收。
根据本申请第二方面前述任一实施方式,在第一承载模块上设置有用于安装光纤组件的光纤安装槽。
根据本申请第二方面前述任一实施方式,每组光纤组件还包括用于安装光纤折射镜的镜筒,光纤束与镜筒可通光地连接。
根据本申请第二方面前述任一实施方式,第一吸附面通过负压吸附基底,在第一移动组件内设置有与第一吸附面连通的用于产生负压的第一气路。
根据本申请第二方面前述任一实施方式,第二承载模块包括用于承载目标衬底的第二载台,第二载台具有用于吸附目标衬底的第二吸附面。
根据本申请第二方面前述任一实施方式,第二吸附面通过负压吸附目标衬底,在第二载台内设置有与第二吸附面连通的用于产生负压的第二气路。
根据本申请第二方面前述任一实施方式,第二承载模块还包括用于在真空箱外部与真空箱内部之间运送第二载台的第二移动组件。
根据本申请第二方面前述任一实施方式,第二承载模块还包括用于水平转动第二载台的转动机构。
根据本申请第二方面前述任一实施方式,第二承载模块还包括用于调整第二吸附面吸附的目标衬底与第一吸附面吸附的基底之间的平行度的调平组件。
根据本申请第二方面前述任一实施方式,调平组件可带动位于第二载台上的目标衬底移动至贴合工位。
根据本申请第二方面前述任一实施方式,调平组件包括基板和调平板,调平板可活动地设置在基板上,第二载台设置在调平板上,
在基板上安装有多组驱动组件,每组驱动组件能够调整与其安装位置对应的局部调平板与基板之间的距离。
根据本申请第二方面前述任一实施方式,调平板通过弹性件可活动地设置在基板上。
根据本申请第二方面前述任一实施方式,每组驱动组件包括驱动电机和驱动杆,驱动杆的一端与驱动电机连接,另一端与调平板抵接,驱动电机用于驱动驱动杆朝向调平板的方向伸出或者朝向背离调平板的方向收回。
根据本申请第二方面前述任一实施方式,驱动杆的与调平板抵接的一端设置有球头,在调平板的对应位置处设置有与球头配合的抵接孔。
根据本申请第二方面前述任一实施方式,装置还包括用于检测基底层与目标衬底是否对准的对准检测模块。
根据本申请第二方面前述任一实施方式,对准检测模块包括用于拍摄位于真空箱内的基底层和目标衬底上的对准标记的相机和调整相机的角度和位置的相机调整组件。
根据本申请第二方面前述任一实施方式,第二承载模块还包括用于调整第二载台的水平位置的第二移动组件,
二维材料转移装置还包括控制器,
控制器根据相机拍摄的图像计算基底层和目标衬底上的对准标记之间的偏差度,并根据偏差度控制第二移动组件运动至使基底层和目标衬底上的对准标记对准的位置。
根据本申请第二方面前述任一实施方式,第二承载模块还包括用于调整第二承载模块承载的目标衬底与第一吸附面吸附的基底之间的平行度的调平组件,
二维材料转移装置还包括控制器,
控制器根据光纤组件检测出的距离数据判断目标衬底与基底之间的平行度,并根据平行度控制调平组件调整目标衬底的位置以使目标衬底与基底平行。
本申请实施例的基底,利用牺牲层作为基底层与二维材料层之间的连接层,牺牲层可以在外部能量源的作用下迅速蒸发,从而实现二维材料层与基底层之间的分离,加快了二维材料层的转移速度,提高了转移效率;同时,还提高了二维材料转移的成功率,可以实现二维材料的大面积转移。
本申请实施例的二维材料转移装置,通过设置能够使牺牲层蒸发的能量源,可以在基底的二维材料层与目标衬底贴合的状态下,使牺牲层迅速蒸发,从而使二维材料层在范德华力的作用下继续与目标衬底保持贴合,大大提升了二维材料的转移效率,还能实现二维材料的大面积转移与高精度的多次转移。
附图说明
图1是本申请一方面实施例提供的基底与目标衬底的结构示意图;
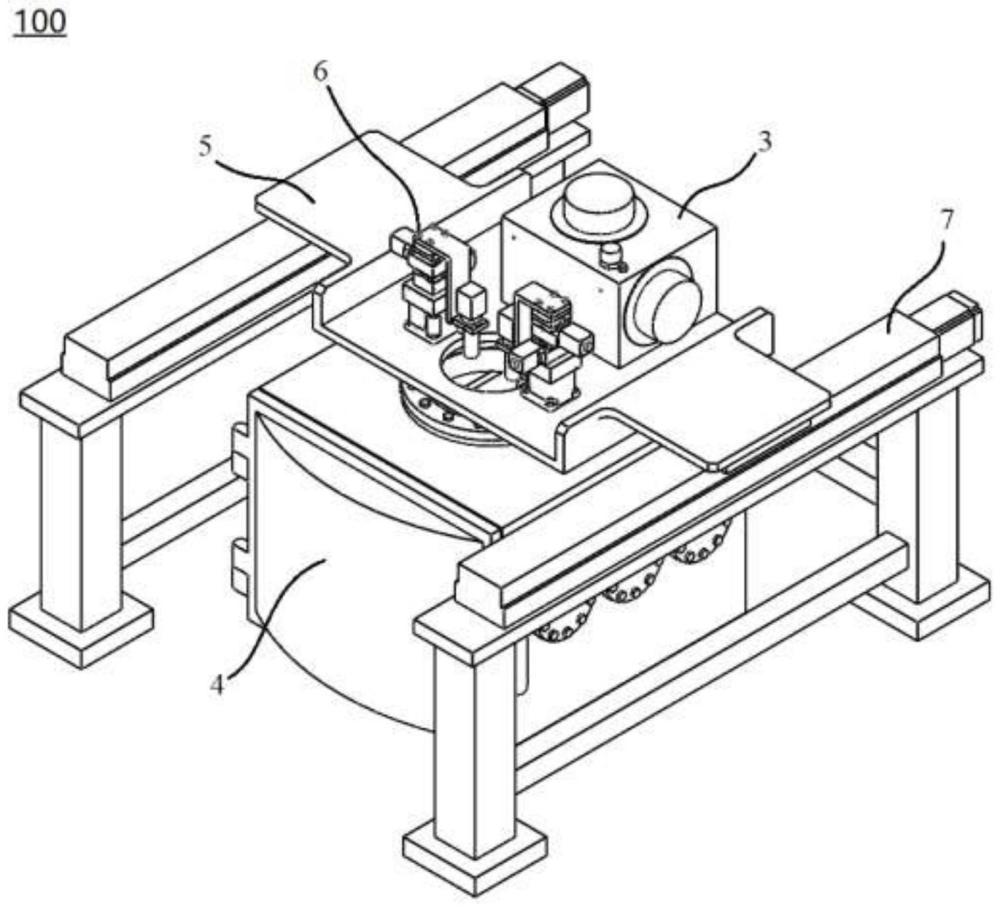
图2本申请一方面实施例提供的二维材料转移装置的结构示意图;
图3是本申请一方面实施例提供的二维材料转移装置的局部结构示意图;
图4是本申请一方面实施例提供的二维材料转移装置的第一承载模块的结构示意图;
图5是本申请一方面实施例提供的第一承载模块的光纤组件检测基底层与目标衬底之间的距离的原理图;
图6是本申请一方面实施例提供的二维材料转移装置的第二承载模块的结构示意图;
图7是本申请一方面实施例提供的第二承载模块的调平组件的结构示意图;
图8是本申请一方面实施例提供的第三承载模块以及对准检测模块的结构示意图。
具体实施方式
下面将详细描述本申请的各个方面的特征和示例性实施例,为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本申请进行进一步详细描述。应理解,此处所描述的具体实施例仅意在解释本申请,而不是限定本申请。对于本领域技术人员来说,本申请可以在不需要这些具体细节中的一些细节的情况下实施。下面对实施例的描述仅仅是为了通过示出本申请的示例来提供对本申请更好的理解。
请参阅图1,本申请第一方面实施例提供的基底S,包括依次层叠设置的基底层S1、牺牲层S2和二维材料层S3,其中牺牲层S2用于在能量源的作用下蒸发,以使二维材料层S3与基底层S1分离,即使二维材料层S3从基底S上脱离。基于转移二维材料的目的,脱离后的二维材料层S3可以通过范德华力的作用附着在目标衬底T上。
在一些实施例中,牺牲层S2为光敏材质,光敏材质的牺牲层S2在光能作用下可以蒸发,从而使二维材料层S3脱离基底S,与目标衬底T贴合。在本实施例中,基底层S1的材质为高透光率材料,比如石英玻璃、硼硅酸盐玻璃,如此,光能就可以透过基底层S1照射到牺牲层S2上。
在一些实施例中,牺牲层S2为低熔沸点材质。低熔沸点材质的牺牲层S2在热能作用下可以蒸发,从而使二维材料层S3脱离基底S,与目标衬底T贴合。在本实施例中,基底层S1的材质可以为硅。
光能和热能均能够使牺牲层S2迅速蒸发,从而提高二维材料的转移效率。
在一些实施例中,二维材料层S3在转移至目标衬底T之前与目标衬底T之间存在微米级别的间隙,蒸发的牺牲层S2可以从该间隙中被抽走,避免冷凝;牺牲层S2蒸发后,二维材料层S3由于自重落到目标衬底T上,通过范德华力与目标衬底T贴合。当然,二维材料层S3在转移至目标衬底T之前也可以直接与目标衬底T贴合,不留间隙。
在一些实施例中,基底层S1为高透光率材质,高透光率可以使光从透过基底层S1照射到牺牲层S2上,从而使牺牲层S2在光能的作用下蒸发。例如,基底层S1的透光率为99.5%以上,可以在基底层S1靠近能量源3的侧面镀一层增透膜以提高透光率。优选的,基底层S1的材质为石英。
在一些实施例中,基底层S1为导热材质,热量可以透过基底层S1传递到牺牲层S2上,从而使牺牲层S2蒸发。优选的,基底层S1的材质硅。
请参阅图2,本申请第二方面实施例提供的二维材料转移装置100,包括第一承载模块1、第二承载模块2和能量源3。其中,第一承载模块1用于承载如上所述的基底S,第二承载模块2用于承载目标衬底T,能量源3,用于产生能使牺牲层S2蒸发的能量。
其中,第一承载模块1可带动基底S移动至贴合工位以使基底S的二维材料层S3与目标衬底T贴合;或者,
第二承载模块2可带动目标衬底T移动至贴合工位以使基底S的二维材料层S3与目标衬底T贴合;或者
第一承载模块1、第二承载模块2均可运动,可分别带动基底S、目标衬底T移动至贴合工位,从而使基底S的二维材料层S3与目标衬底T在贴合工位贴合;
能量源3产生的能量使位于贴合工位的牺牲层S2蒸发,从而使二维材料层S3与基底层S1分离;二维材料层S3在范德华力的作用下与目标衬底T贴合,从而成功向目标衬底T转移二维材料,大大提升了二维材料的转移效率。
请继续参阅图2,在一些实施例中,二维材料转移装置100还包括用于产生真空环境的真空箱4,贴合工位位于真空箱4内;真空环境可以可减少杂质吸附,避免转移过程中二维材料的破损,同时也可以保证二维材料不会发生漂移。由于贴合工位设置的真空箱4内部,那么为了方便放放置基底S和目标衬底T,第一承载模块1可在真空箱4外部与真空箱4内部之间运送基底S,第二承载模块2可在真空箱4外部与真空箱4内部之间运送目标衬底T。当需向真空箱内的贴合工位运送基底S时,利用第一承载模块1将基底S从真空箱4外部运送至真空箱4内部的贴合工位;当需要向真空箱4内部的贴合工位运送目标衬底T时,利用第二承载模块2将目标衬底从真空箱4外部运送至真空箱内部的贴合工位。当然,也可以在由操作人员分别将基底S和目标衬底T手动放入真空箱4内部的第一承载模块1和第二承载模块2上,然后利用第一承载模块1和第二承载模块2分别将基底S和目标衬底T运送至目标工位。若二维材料层S3在转移至目标衬底T之前与目标衬底T之间存在微米级别的间隙,那么在真空箱中,蒸发的牺牲层S2可以从该间隙中被抽走,避免牺牲层S2冷凝。
在一些实施例中,二维材料转移装置100还包括用于承载能量源3的第三承载模块5。第三承载模块5可以为能量源3提供一个安装基准位,方便快速准确的安装、调整或者更换能量源。由于能量源3主要作用于位于贴合工位的基底S,可以不用移动能量源3,因此,可以将能量源设置在真空箱4内部或者真空箱4外部,那么第三承载模块5可以位于真空箱4内部,也可以位于真空箱4外部。例如,若能量源3是热源,为了减少热量损失,可以将能量源3设置在真空箱内部,即通过第三承载模块5将能量源3设置在真空箱4内部。
若能量源3是光源,在位于贴合工位的基底S介于光源与目标衬底T之间的情况下,基底层S为高透光率材质,光源发出的光能够透过基底层S照射到牺牲层S2上。为了减小真空箱的体积,在图2所示的实施例中,第三承载模块5设置在真空箱4外部,与真空箱4相邻设置,真空箱4的与第一承载模块1相邻的侧壁设有可透过光线的透光区域,位于第三承载模块5上的光源发出的光能够透过透光区域照射到真空箱4内部,从而使贴合工位的牺牲层S2能够接收到光能,进而在光能的作用下蒸发。可以将真空箱4的与第一承载模块1相邻的侧壁整体设置成透光区域,也可以将真空箱4的与第一承载模块1相邻的侧壁局部设置成透光区域,视光源发出的光线面积而定。
在一些实施例中,光源能够发出宽光谱脉冲光。光源可以是紫外光、可见光、远红外波段的光。优选的,光源为大面积宽光谱脉冲烧结光源。通过大面积宽光谱脉冲烧结光源对基底S进行曝光,这种光源的面积大,同时光能量密度均匀,可以使牺牲层S2瞬间蒸发,从而提高二维材料的转移效率,实现二维材料的大面积转移。
在一些实施例中,第三承载模块5可带动能量源3移动,从而在贴合工位上方的位置与其他位置之间移动,当需要利用能量源3使牺牲层S2蒸发时,就将通过第三承载模块5将能量源3移动至贴合工位的上方,完成工作后将第三承载模块5复位,将能量源3运送至其他位置。如图2所示,二维材料转移装置100还包括机架7,第三承载模块5可移动地设置在机架7上,可以手动推动或者电机驱动第三承载模块5沿着机架上的轨道移动至贴合工位上方。
请参阅图3和图4,在一些实施例中,第一承载模块1包括用于将基底S运送至贴合工位的第一移动组件11,第一移动组件11上具有用于吸附基底S的第一吸附面111,第一承载模块1与第二承载模块2相邻设置,第一吸附面111朝向第二承载模块2所在的方向。
用于吸附基底S的吸附力可以是静电力,也可以是负压产生的吸附力,还可以是磁铁产生的磁力,视基底层S1的材质而定。请参继续参阅图3和图4,在一些实施例中,第一吸附面111通过负压吸附基底S,在第一移动组件11内设置有与第一吸附面111连通的用于产生负压的第一气路112。不论基底层S1是什么材质,都可以用负压吸附住基底S。优选的,在第一吸附面111上设置有与第一气路连通的环形凹槽,第一气路112工作时,会在环形凹槽内形成负压,从而吸附基底S。
请继续参阅图3和图4,在一些实施例中,第一承载模块1包括第一载台12,第一载台12用于为第一移动组件11提供移动轨道121,第一移动组件11沿着移动轨道121在真空箱4内外之间移动。第一移动组件11与移动轨道121一起形成抽拉式结构,通过抽拉第一移动组件11就可以使第一移动组件11在真空箱4内外之间移动,从而将基底S运送至真空箱4内,或者从真空箱4内运出。
当然,第一移动组件11也可以通过其他运动方式在真空箱4内外之间移动。例如,第一运动组件11可以与真空箱4之间枢轴连接,通过开合的方式使第一移动组件11在真空箱4内外之间移动。具体实现方式可以是,在第一载台12/真空箱4上设置转轴,第一移动组件11绕着转轴转动以在真空箱4内外之间移动。
在基底S与目标衬底T贴合的过程中,需要严格保证基底S与目标衬底T之间的平行度,因此,可以设置专用于检测基底S与目标衬底T之间的平行度的组件。
请继续参阅图4,在一些实施例中,在第一承载模块1上设置有多组用于检测基底层S1与目标衬底T之间的距离的光纤组件13。每一组光纤组件13检测不同位置处基底层S1与目标衬底T之间的距离,通过多组光纤组件13检测出的距离值,就可以判断基底S与目标衬底T之间是否平行。
请参阅图5,利用光纤组件13检测基底S与目标衬底T之间距离的原理如下:在基底S与目标衬底T逐渐靠近的过程中,当基底S与目标衬底T之间到达一定距离后,光纤组件13外接的光源产生的白光透过基底层S1照射在目标衬底T上,目标衬底T的反射光与基底层S1下表面的反射光发生干涉并通过光纤组件13进入光谱仪;最后通过光谱仪计算得出目标衬底T与基底层S1之间的距离。基底S中的牺牲层S2和二维材料层S3不会反射白光,因此,用于测距离的位置设置在牺牲层S2和二维材料层S3所在区域之外。
在一些实施例中,在第一承载模块1上设置的光纤组件13的数量至少为3组,每组光纤组件13包括光纤束131,光纤束131包括用于向基底层S1和目标衬底T发射光线的发射光纤(图中未示出)和用于接收经基底层S1和目标衬底T反射的反射光线的接收光纤(图中未示出)。优选的,如图4所示,设置了3组光纤组件13;通过三组光纤组件13,可以获得三组距离数据,每组距离数据表示目标衬底T与基底层S1上不同位置处的距离,通过该三组数据即可得出目标衬底T与基底层S1之间的平行度。当然,也可以设置更多数量的光纤组件13。利用白光干涉测距的方法可实现纳米级分辨率。
请继续参阅图4,在一些实施例中,每组光纤组件13还包括光纤折射镜(图中未示出),光纤折射镜用于改变光纤束131的光路以使从发射光纤发出的光线经基底层S1和目标衬底T反射后能够被接收光纤接收。如图4所示,若将发射光纤和反射光纤捆成一束,那么就需要使从发射光纤发出的光经过反射后能够大致原路返回至反射光纤中。按照图5所示的方向,从发射光纤发出的发射光线大致垂直地入射到基底层S1和目标衬底T,经过反射后形成的反射光线也需要从基底层S1和目标衬底T的表面大致垂直地反射回接收光纤。在图4的实施例中,光纤折射镜使发射光纤的光路发生90°改变,从而使出射光线能够大致垂直入射到基底层S1和目标衬底T的表面。
请继续参阅图4,在一些实施例中,在第一承载模块1上设置有用于安装光纤组件13的光纤安装槽14,每组光纤组件13对应一个光纤安装槽14。每组光纤组件13还包括用于安装光纤折射镜的镜筒132,光纤束131与镜筒132可通光地连接。镜筒132也设置在对应的光纤安装槽14内。
请参阅图6,在一些实施例中,第二承载模块2包括用于承载目标衬底T的第二载台21,第二载台21具有用于吸附目标衬底T的第二吸附面211。同样地,可以视目标衬底T材质的不同,采用不同的吸附方式,例如静电吸附、磁力吸附、负压吸附等。在本实施例中,第二吸附面211通过负压吸附目标衬底T,在第二载台21内设置有与第二吸附面211连通的用于产生负压的第二气路212。优选的,在第二吸附面211上设置有与第二气路212连通的环形凹槽,第二气路212工作时,会在环形凹槽内形成负压,从而吸附目标衬底T。
请继续参阅图6,在一些实施例中,第二承载模块2还包括用于在真空箱4外部与真空箱4内部之间运送第二载台21的第二移动组件22。第二移动组件22可以在真空环境中实现纳米级分辨率的直线运动,从而使第二载台21的移动更加精准。
请继续参阅图6,在一些实施例中,第二承载模块2还包括用于水平转动第二载台21的转动机构23。在执行基底S与目标衬底T的对准步骤中,通过转动机构23可以实现对目标衬底水平转动角度的调整。转动机构23可在真空环境中实现微弧度分辨率的旋转运动,从而使第二载台21的转动更加精准。
请继续参阅图6,在一些实施例中,第二承载模块2还包括用于调整第二吸附面211吸附的目标衬底T与第一吸附面111吸附的基底S之间的平行度的调平组件24。通过光纤组件13及外部光谱仪检测出基底层S1与目标衬底T之间的平行度后,调平组件24可以通过光谱仪的数据对目标衬底T进行水平度的调整,从而使目标衬底T与基底层S1平行。当然,调平组件24也可以是不需要利用光谱仪数据的自适应万向调节机构。调平后,可以保证二维材料的转移精度,避免二维材料漂移。
请继续参阅图3和图6,在一些实施例中,调平组件24可带动位于第二载台21上的目标衬底T移动至贴合工位。调平组件24工作时,先带动目标衬底T朝向基底S移动,当达到一定距离后,光纤组件13检测目标衬底T与基底层S2之间的平行度;调平组件24再根据测得的平行度调整目标衬底T的水平度,从而使目标衬底T与基底层S1平行;在目标衬底T与基底层S2平行后,调平组件24再带动目标衬底T移动至贴合工位以与二维材料层S3贴合。
请继续参阅图6,在一些实施例中,调平组件24包括基板241和调平板242,调平板242可活动地设置在基板241上,第二载台21设置在调平板242上,基板241设置在转动机构23上,转动机构23设置在第二移动组件22上;第二移动组件22可带动转动机构23和调平组件24整体移动;在基板241上安装有多组驱动组件243,每组驱动组件能够调整与其安装位置对应的调平板242局部与对应的基板241局部之间的距离。每组驱动组件243的一端位于基板241上,另一端与调平板242连接或者抵接,相当于每组驱动组件243只与调平板242和基板241的局部有接触,调整距离时,是调整调平板242和基板241的与驱动组件243的局部位置之间的距离。通过设置多组调平组件24,就可以对调平板242的多个位置进行调整,从而达到调整调平板242的水平度的目的,进而达到将调平板242上的第二载台21上的目标衬底T调整至与第一移动组件11上的基底S的基底层S1平行的目的。
请继续参阅图6,在一些实施例中,调平板242通过弹性件244可活动地设置在基板241上;弹性件可以弹簧,弹簧的一端连接调平板242,另一端连接基板241,在驱动组件243驱动调平板242朝向第一承载模块1移动的情况下,弹簧处于拉伸状态,在驱动组件243驱动调平板242背离第一承载模块1移动的情况下,调平板242可以在弹簧的弹性恢复力作用下复位。
当然,也可以不设置弹簧,调平板242直接与驱动组件243连接,例如,驱动组件243的一端固定在基板241上,另一端与调平板242连接。
请继续参阅图6,在一些实施例中,每组驱动组件243包括驱动电机2431和驱动杆2432,驱动杆2432的一端与驱动电机2431连接,另一端与调平板242抵接,驱动电机2431用于驱动驱动杆2432朝向调平板242的方向伸出或者朝向背离调平板242的方向收回。当驱动杆2432朝向调平板242的方向伸出时,可以带动调平板242朝向第一承载模块1的方向移动,从而使位于调平板242上的第二载台21上的目标衬底T朝向贴合工位移动以与二维材料层S3贴合;当驱动杆2432朝向背离调平板242的方向收回时,调平板242在弹簧的弹性恢复力作用下复位,目标衬底T和与目标衬底贴合的二维材料曾层S3向背离基底层S1的方向移动,拉来与基底层S1之间的距离,方便后续取出目标衬底T。驱动电机2431可在真空环境中实现纳米级分辨率的直线运动,例如,可以是步进压电电机。
请参阅图7,在一些实施例中,驱动杆2432的与调平板242抵接的一端设置有球头2433,在调平板242的对应位置处设置有与球头2433抵接的抵接孔2421。抵接孔2421可以为倒角圆孔。
请继续参阅图2,在一些实施例中,二维材料转移装置100还包括用于检测基底层S1与目标衬底T是否对准的对准检测模块6。对于大面积二维材料,在转移时,需要保证二维材料与目标衬底对准,以将全部二维材料成功转移。通过对准检测模块6可以检测目标衬底T与基底S是否对准。对准检测模块6可以安装在第三承载模块5上。
可以采用视觉对准系统,来实现对准检测的功能。具体的,如图8所示,对准检测模块6包括用于拍摄位于真空箱4内的基底层S1和目标衬底T上的对准标记的相机61和调整相机61的角度和位置的相机调整组件62。
如图8所示,相机61的数量为两个,在每个相机上安装有一个远心镜头610,相机61通过相机安装板63设置在相机调整组件62上,相机调整组件62固定在第三承载模块5上。相机调整组件62包括用于调节相机Z向位置的Z向升降台621、用于调节相机的XY平面位置的XY平移台622、用于调节相机俯仰角的俯仰调节台623,Z向升降台621、XY平移台622、俯仰调节台623依次固定连接;Z向升降台621固定在第三承载模块5上,相机安装板63与俯仰调节台623可转动地连接。相机调整组件62可实现亚微米分辨率的运动。
在一些实施例中,上述的第二移动组件22还能用于调整第二载台21的水平位置,
二维材料转移装置100还包括控制器,控制器根据相机61拍摄的图像计算基底层S1和目标衬底T上的对准标记之间的偏差度,并根据偏差度控制第二移动组件22运动至使基底层S1和目标衬底T上的对准标记对准的位置。通过对准检测模块6可以检测基底层S1与目标衬底T是否对准,在检测到未对准的情况下,可以通过控制器控制第二运动机构22使基底层S1与目标衬底T对准,从而可以实现二维材料多次转移堆叠的精度。
在一些实施例中,第二承载模块2包括用于调整第二承载模块2承载的目标衬底T与第一吸附面111吸附的基底S之间的平行度的调平组件24的情况下,
二维材料转移装置100的控制器还用于根据光纤组件13检测出的距离数据判断目标衬底T与基底S之间的平行度,并根据平行度控制调平组件24调整目标衬底T的位置以使目标衬底T与基底S平行。
上述二维材料转移装置100的使用方式如下:
首先将第一移动组件11从第一载台12中拉出;将基底S放置在第一吸附面111上,此时由于第一气路112外接真空泵的作用,基底S吸附在第一吸附面111上;之后倒置第一移动组件11,即使基底S朝下,重新插入第一载台12内。
控制第二移动组件22向真空箱4外运动,此时驱动电机2431位移为0,调平板242位于行程最低位置,这样方便目标衬底的手动放置;将目标衬底放置在第二载台21上,由于第二气路212外接真空泵的作用,目标衬底固定在第二吸附面211上;第二移动组件22将目标衬底移动到对准检测模块6下方(在真空箱顶部通过法兰盘安装有透光石英玻璃,保证相机61可以获取真空箱4内部图像以及光源可直接照射在基底S上)。
关闭真空箱的大门,通过法兰外接的真空泵对真空箱4抽真空,并且保证真空箱4形成的气压高于第一气路112与第二气路212的气压,通过气压差保证目标衬底与基底不发生掉落与位移。
驱动电机2431推动调平板242与第二载台21向上移动,使目标衬底与基底接近。当到达一定距离后,光纤组件13连接的光源产生白光透过基底层S1照射在目标衬底T上,目标衬底的反射光与基底层S1下表面的反射光发生干涉并通过光纤组件进入外接的光谱仪。通过光谱仪数据计算得出目标衬底与二维材料基底的距离。通过3个光纤组件13获得的数据获得目标衬底T与基底层S1上3点的距离,即得出目标衬底与基底层S1相对的平行度。通过调平组件24将目标衬底T调整至与基底层S1平行的状态。
通过对准检测模块6对目标衬底与基底层S1进行对准检测;该过程保证了二维材料堆叠(即多次转移)的精度,保证每一次转移后二维材料都在平面上的理想位置。具体的,通过相机调整组件62将相机61调整至理想位置,第二移动组件22与转动机构23根据相机61获得的图像数据移动目标衬底T,将目标衬底T上的对准标记(在基底层S1与目标衬底T上均有提前加工好的对准标记)与基底层S1上的对准标记对准。其中,远心镜头610可保证相机61放大倍率不发生变化。
完成调平与对准后,调平组件24将目标衬底T向基底S的方向推动,使目标衬底T与二维材料层S3在贴合工位贴合。
推动第三承载模块5沿着机架7上的轨道运送,将能量源3移动到位于贴合工位的目标衬底T的正上方。打开能量源3(光源)进行曝光,此时牺牲层S2蒸发,二维材料层S3贴合在目标衬底T上,单次转移完成。
之后可对真空箱4泄压,更换基底S,并重复上述过程实现高精度的多次转移。
上述转移过程基底层、牺牲层、二维材料层、目标衬底均位于真空中,真空可避免转移时二维材料发生位置漂移,影响转移精度。真空也可使蒸发后的牺牲层迅速扩散开。该方法可实现晶圆级、高效的单次转移,并实现高精度的二维材料堆叠。
- 用于建筑施工的材料转移装置
- 一种用于电化学剥离二维纳米材料的电解液
- 一种用于凹形不平整衬底的二维层状纳米材料转移装置
- 一种张力控制机构及二维材料电解转移装置