一种空海跨领域可重构航行器
文献发布时间:2023-06-23 06:30:03
技术领域
本发明涉及飞行器的技术领域,特别涉及一种减振器和运输载具。
背景技术
近年来,无人机技术迅速发展已经广泛应用于灾后搜救、农业植保、安防巡检、军事侦察等任务,并且对各方面提出了更高的需求。目前大多数飞行器都只存在单一的工作模态,在复杂环境中对信息的获取是有限的。对于我国近海、近空领域的巡检、测绘以及安全检查等任务,单一的航行器在开展工作时比较缓慢且过程也较为复杂,且水下航行器速度低,远程支援耗时大。所以,具备一种即能水下航行又能空中作业的跨领域航行器,对于交叉环境作业具有很高的应用价值。
发明内容
本发明的目的在于提供一种空海跨领域可重构航行器,以解决现有技术缺乏跨领域航行器的问题。
为了解决上述技术问题,本发明提供了一种空海跨领域可重构航行器,包括机身、机翼、折叠机构、垂直推进器和水下推进器;所述机身的机头设有桨叶折叠可控的拉升螺旋桨,所述机身相对的两侧均设有尾部连杆,两所述尾部连杆均往所述机身尾部的后方延伸,两所述尾部连杆之间连接有尾翼;两所述机翼分别转动连接于所述机身相对的两侧,两所述机翼均与所述折叠机构联动连接;所述折叠机构设于所述机身上,所述折叠机构用于控制两所述机翼的转动展开和收拢;所述垂直推进器为螺旋桨可正反转的结构,两所述垂直推进器分别设于所述机身的相对两侧,两所述垂直推进器的动力输出方向垂直于所述机身轴向;所述水下推进器设于所述机身的尾部,所述水下推进器置于两所述尾部连杆之间,所述水下推进器为动力输出方向可调控结构。
在其中一个实施例中,所述机身相对的两侧均设有托板,两所述机翼分别转动连接于两所述托板上;所述折叠机构置于两所述托板之间,所述折叠机构包括驱动单元、滑块和拉杆;所述驱动单元用于驱动所述滑块沿所述机身轴向进行往返移动;所述滑块相对的两侧面分别与两所述拉杆的一端转动连接;两所述拉杆的另一端分别与两所述机翼转动连接。
在其中一个实施例中,所述驱动单元包括电机和丝杆;所述电机与所述丝杆同轴连接,所述电机用于驱动所述丝杆自转;所述丝杆沿所述机身的轴向延伸布置;所述滑块以螺纹连接的方式套于所述丝杆外。
在其中一个实施例中,所述水下推进器包括转向机构、推进电机和推进螺旋桨,所述转向机构设于所述机身上,所述转向机构与所述推进电机活动连接,所述推进电机以提供旋转动力的方式与所述推进螺旋桨连接,所述转向机构用于调控所述推进螺旋桨的动力输出方向。
在其中一个实施例中,所述水下推进器还包括基座、保护罩和转接板;所述基座设于所述机身上,所述基座上设有三个所述转向机构;所述保护罩包围于三个所述转向机构外,所述保护罩的罩顶外表面设有球头直杆,所述球头直杆与所述转接板的一表面转动连接;所述转接板的另一表面设有所述推进电机;所述转向机构包括偏转舵机和球头拉杆;所述偏转舵机设于所述基座上,所述偏转舵机以提供摆动动力的方式与所述球头拉杆的动力输入端连接;所述球头拉杆的动力输出端穿过所述保护罩与所述转接板转动连接,所述球头拉杆的摆动于改变所述推进螺旋桨的动力输出方向。
在其中一个实施例中,所述水下推进器还包括整流罩,所述整流罩包围于所述转向机构外,所述整流罩包括相互连接的整流圆柱段和整流锥台段,所述整流圆柱段置于所述机身与所述整流锥台段之间,在往远离所述机身的方向上,所述整流锥台段的径向尺寸逐渐缩小。
在其中一个实施例中,所述水下推进器还包括矢量喷管,所述矢量喷管包围于所述推进电机和所述推进螺旋桨外,所述矢量喷管包括相互连接的喷管圆柱段和喷管锥台段,所述喷管圆柱段置于所述机身与所述喷管锥台段之间,在往远离所述机身的方向上,所述喷管锥台段的径向尺寸逐渐缩小。
在其中一个实施例中,所述尾翼包括两相互连接为V形的尾板,两所述尾板分别与两所述尾部连杆连接固定,两所述尾板围成的V形开口朝向所述机身的底部下方。
在其中一个实施例中,所述机身的底部设有密封电子仓,所述密封电子仓朝向机头的部位设有透明罩,所述密封电子仓内设有云台,所述云台上设有高清摄像头,所述高清摄像头的拍摄方向对准所述透明罩。
在其中一个实施例中,所述密封电子仓内还设有蓄电池和固定支架;所述蓄电池用于为所述空海跨领域可重构航行器供电;所述固定支架上设有通信模块、控制器、数据处理与存储模块、导航模块、转接模块和电源模块。
本发明的有益效果如下:
由于所述垂直推进器为螺旋桨可正反转的结构,两所述垂直推进器分别设于所述机身的相对两侧,两所述垂直推进器的动力输出方向垂直于所述机身轴向,所以垂直推进器的设置则实现了航行器的垂直升降控制;而所述折叠机构用于控制两所述机翼的转动展开和收拢,所述水下推进器置于两所述尾部连杆之间,所述水下推进器为动力输出方向可调控结构,则使得水下航行得以实现;即采用此方案后,则切实解决了现有技术缺乏跨领域航行器的问题。
附图说明
为了更清楚地说明本发明的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
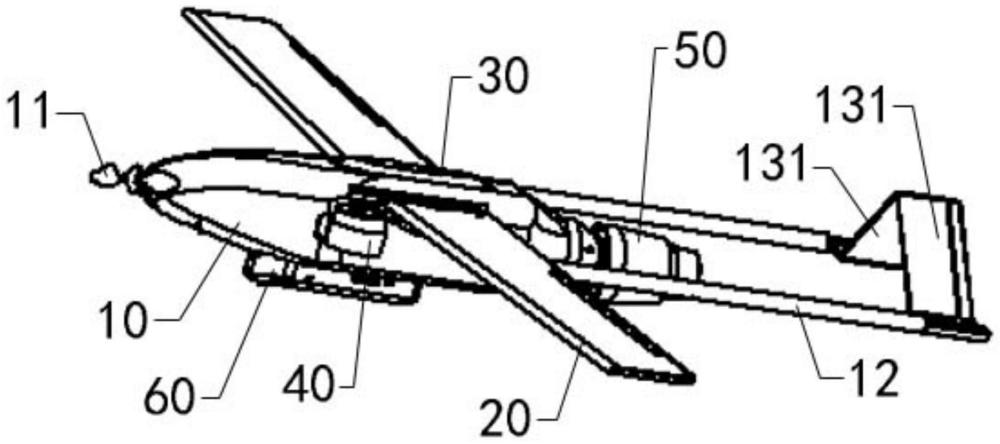
图1是本发明实施例提供的结构示意图;
图2是图1的折叠机构结构示意图;
图3是图1的机翼折叠状态结构示意图;
图4是图1的机翼伸展状态结构示意图;
图5是图1的水下推进器拆解结构示意图;
图6是图5的偏转舵机布局方式示意图;
图7是图5的推进电机转向控制结构示意图;
图8是图7的局部拆解结构示意图;
图9是图1的密封电子仓透视结构示意图;
图10是图9的各模块设置方式结构示意图。
附图标记如下:
10、机身;11、拉升螺旋桨;12、尾部连杆;13、尾翼;131、尾板;14、托板;
20、机翼;
30、折叠机构;31、驱动单元;311、电机;312、丝杆;32、滑块;33、拉杆;
40、垂直推进器;
50、水下推进器;51、转向机构;511、偏转舵机;512、球头拉杆;52、推进电机;53、推进螺旋桨;54、基座;55、保护罩;56、转接板;57、球头直杆;58、整流罩;581、整流圆柱段;582、整流锥台段;59、矢量喷管;591、喷管圆柱段;592、喷管锥台段;
60、密封电子仓;61、透明罩;62、云台;63、高清摄像头;64、蓄电池;65、固定支架;66、通信模块;67、控制器;68、数据处理与存储模块;69、导航模块;610、转接模块;611、电源模块。
具体实施方式
下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述。
本发明提供了一种空海跨领域可重构航行器,其实施例如图1至图4所示,包括机身10、机翼20、折叠机构30、垂直推进器40和水下推进器50;机身10的机头设有桨叶折叠可控的拉升螺旋桨11,机身10相对的两侧均设有尾部连杆12,两尾部连杆12均往机身10尾部的后方延伸,两尾部连杆12之间连接有尾翼13;两机翼20分别转动连接于机身10相对的两侧,两机翼20均与折叠机构30联动连接;折叠机构30设于机身10上,折叠机构30用于控制两机翼20的转动展开和收拢;垂直推进器40为螺旋桨可正反转的结构,两垂直推进器40分别设于机身10的相对两侧,两垂直推进器40的动力输出方向垂直于机身10轴向;水下推进器50设于机身10的尾部,水下推进器50置于两尾部连杆12之间,水下推进器50为动力输出方向可调控结构。
在需要控制航行器在空中飞行时,可以利用折叠机构30控制两机翼20变为展开状态,以使两机翼20展开为V字形,然后由拉升螺旋桨11的高速转动提供拉升动力,从而实现了航行器的飞行;其中,在飞行过程中若需要进行转向,则可以通过控制机翼20和尾翼13上的舵翼实现,而舵翼的为一种转动可控的结构,舵翼的具体结构和操控方式参考现有飞行器的实施方式则可。
在需要控制航行器在水中潜航时,可以利用折叠机构30控制两机翼20往内收拢,以使两机翼20收拢为大致平行相对的状态,然后控制拉升螺旋桨11将自身的桨叶折叠收纳,从而使得航行器整体近似一字形,以便于航行器快速进入水下进行潜航;而在潜航过程中,可以利用垂直推进器40实现航行器的升降控制,譬如垂直推进器40的螺旋桨正转若能产生向下推力,则可实现航行器在水中的上浮,显而易见的,此时垂直推进器40若控制螺旋桨反转则能产生向上推力,从而实现航行器在水中的下潜;而在水中潜航的过程中,前进动力主要由水下推进器50提供,此时只需调控水下推进器50的动力输出方向,则可实现航行器的潜航方向调控。
需要指出,为实现垂直推进器40的螺旋桨正反转控制,只需使用具备正反转功能的电机311作为垂直推进器40的动力源即可;而为了实现拉升螺旋桨11的折叠控制,可设置拉升螺旋桨11的桨叶与机头部位转动连接,然后利用相应的舵机控制拉升螺旋桨11的桨叶进行翻转即可。
如图1至图4所示,为实现机翼20的展开和收拢控制,此实施例优选设置机身10相对的两侧均设有托板14,两机翼20分别转动连接于两托板14上;折叠机构30置于两托板14之间,折叠机构30包括驱动单元31、滑块32和拉杆33;驱动单元31用于驱动滑块32沿机身10轴向进行往返移动;滑块32相对的两侧面分别与两拉杆33的一端转动连接;两拉杆33的另一端分别与两机翼20转动连接。
此时两托板14分别固定连接于机身10的左右两侧,两机翼20设置转轴插入两托板14相应的孔位内,从而实现了两机翼20与两托板14的转动安装;而拉杆33的本体呈直杆状,拉杆33的两端均以铰接的形式实现转动连接,所以若驱动单元31驱动滑块32往机头方向移动,则可控制量拉杆33进行靠拢,以实现两机翼20的折叠收纳控制,若驱动单元31驱动滑块32往机尾的方向移动,则可控制两拉杆33往外伸展,以实现两机翼20的展开控制好。
如图2所示,为实现对滑块32的驱动,此实施例优选设置驱动单元31包括电机311和丝杆312;电机311与丝杆312同轴连接,电机311用于驱动丝杆312自转;丝杆312沿机身10的轴向延伸布置;滑块32以螺纹连接的方式套于丝杆312外。
在采用此设置方式后,则可利用电机311的正反转实现滑块32的移动控制;譬如电机311在进行正向转动时,则可带动丝杆312进行同步正向自转,假定丝杆312的正向自转能够控制滑块32往机头方向移动,那在控制电机311进行反向转动后,则可带动丝杆312进行同步反向自转,以此实现了滑块32往机尾方向的移动;此控制方式的好处在于操控简便,而且滑块32不容易产生自动移位的问题,从而为设备的稳定工作提供了重要保障。
如图1、以及图5至图8所示,为实现水下推进器50的动力输出,此实施例优选设置水下推进器50包括转向机构51、推进电机52和推进螺旋桨53,转向机构51设于机身10上,转向机构51与推进电机52活动连接,推进电机52以提供旋转动力的方式与推进螺旋桨53连接,转向机构51用于调控推进螺旋桨53的动力输出方向。
在进行应用时,由推进电机52控制推进螺旋桨53进行高速转动,以在水下产生驱动航行器前进的动力;在默认的状态中,推进螺旋桨53的动力输出方向与航行器轴向相同,且朝向机尾的方向。
而在需要进行转向操作时,则由转向机构51改变推进螺旋桨53的动力输出方向,则可实现航行器在水下的转向控制,如图1、以及图5至图8所示,为实现水下推进器50的转向控制,此实施例优选设置水下推进器50还包括基座54、保护罩55和转接板56;基座54设于机身10上,基座54上设有三个转向机构51;保护罩55包围于三个转向机构51外,保护罩55的罩顶外表面设有球头直杆57,球头直杆57与转接板56的一表面转动连接;转接板56的另一表面设有推进电机52;转向机构51包括偏转舵机511和球头拉杆512;偏转舵机511设于基座54上,偏转舵机511以提供摆动动力的方式与球头拉杆512的动力输入端连接;球头拉杆512的动力输出端穿过保护罩55与转接板56转动连接,球头拉杆512的摆动于改变推进螺旋桨53的动力输出方向。
在采用此结构后,偏转舵机511只需控制球头拉杆512往返摆动,则可实现转接板56朝向的变换控制,此时推进螺旋桨53将自动跟随改变朝向,从而实现了推进螺旋桨53的动力输出方向变换调控。
需要指出,球头拉杆512为多段杆体活动连接而成,其中首末两杆体的端部会设置球形关节,而相邻杆体之间可采用球形关节或铰接的方式实现活动连接。
如图1、以及图5至图8所示,为减少转向机构51形成的潜航阻力,此实施例优选设置水下推进器50还包括整流罩58,整流罩58包围于转向机构51外,整流罩58包括相互连接的整流圆柱段581和整流锥台段582,整流圆柱段581置于机身10与整流锥台段582之间,在往远离机身10的方向上,整流锥台段582的径向尺寸逐渐缩小。
在采用此设置方式后,由于整流罩58的外形呈流线形,从而减少了航行器在航行过程中产生的阻力,为航行器的低能耗高速航行提供了基础。
如图1、以及图5至图8所示,为减少推进电机52和推进螺旋桨53形成的潜航阻力,此实施例优选设置水下推进器50还包括矢量喷管59,矢量喷管59包围于推进电机52和推进螺旋桨53外,矢量喷管59包括相互连接的喷管圆柱段591和喷管锥台段592,喷管圆柱段591置于机身10与喷管锥台段592之间,在往远离机身10的方向上,喷管锥台段592的径向尺寸逐渐缩小。
在采用此设置方式后,由于矢量喷管59的外形呈流线形,从而减少了航行器在航行过程中产生的阻力,即进一步为航行器的低能耗高速航行创造了条件。
如图1所示,为了提高航行稳定性,此实施例优选设置尾翼13包括两相互连接为V形的尾板131,两尾板131分别与两尾部连杆12连接固定,两尾板131围成的V形开口朝向机身10的底部下方。
在采用此设置方式后,能够充分利用航行器的尾部空间设置体积充分的尾翼13,以确保最大程度提高航行器的航行稳定性。
如图1、图9和图10所示,为了实现图像信息获取,此实施例优选设置机身10的底部设有密封电子仓60,密封电子仓60朝向机头的部位设有透明罩61,密封电子仓60内设有云台62,云台62上设有高清摄像头63,高清摄像头63的拍摄方向对准透明罩61。
在采用此设置方式后,则可利用高清摄像头63进行图像拍摄,以便获取各种需要的图像信息,而在进行拍摄的过程中,则可利用云台62实现高清摄像头63的拍摄方向调控;其中,透明罩61不但不会对拍摄操作造成遮挡,更实现了对高清摄像头63和云台62的保护。
如图1、图9和图10所示,为了实现航行器的控制,此实施例优选设置密封电子仓60内还设有蓄电池64和固定支架65;蓄电池64用于为空海跨领域可重构航行器供电;固定支架65上设有通信模块66、控制器67、数据处理与存储模块68、导航模块69、转接模块610和电源模块611。
密封电子仓60主要用于实现航行器的自动化控制,具体的,固定支架65用于实现密封电子仓60各个部件的安装固定,蓄电池64用于为航行器进行供电,通信模块66用于实现航行器与外界的通信活动,控制器67用于对航行器进行各种操作控制,数据处理与存储模块68用于存储航行器采集的各种数据,转接模块610用于实现各器件之间的信号转接功能,电源模块611用于实现各种器件之间的供电控制。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
- 一种面向物联网领域的动态可重构卷积神经网络加速器架构
- 跨介质航行器及跨介质航行器的跨域方法
- 复杂水域环境贴底定高航行的跨介质航行器和航行方法