集评估测试和主被动训练的上肢康复训练器
文献发布时间:2023-06-19 11:14:36
技术领域
本发明涉及康复训练设备,特别涉及集评估测试和主被动训练的上肢康复训练器,属于康复训练器械技术领域。
背景技术
脑卒中的病患者在我国逐年增加,即使治疗后其往往遗留有上肢和下肢运动障碍,部分下肢运动障碍患者可以通过行走训练逐步能够自行行走进行康复训练,而上肢运动障碍需要通过专业的训练器械进行康复训练,目前的上肢康复训练设备机构复杂、体积大,需要在专门的训练场所进行,限制了患者的应用,而且目前的这种训练设备往往仅具有主动训练、被动训练、阻力训练、助力训练中的其中一种功能,其功能单一,且无法对患者的训练有效性和效果进行测试、评估,难以寻求最佳的康复训练方案,还有目前的被动上肢康复训练在训练中设备发生故障时对患者的保护偏弱,由于这类患者的神经感知能力较差,患者在训练时可能会受到大幅度强制移动而发生被伤害。
发明内容
本发明的目的在于克服目前的上肢康复训练器中存在的上述问题,提供一种集评估测试和主被动训练的上肢康复训练器。
为实现本发明的目的,采用了下述的技术方案:集评估测试和主被动训练的上肢康复训练器,包括底板,在底板上固定安装有前后方向的导轨,左右方向的导轨前后滑动安装在前后方向的导轨上,左右方向的导轨上安装有滑块,滑块上安装有手柄、支撑手托,在底板上固定安装有红外触摸屏框,左右方向的导轨和滑块均位于红外触摸屏框的上方,在红外触摸屏框四个角向外的底板上分别安装有一套智能拉绳驱动机构,所述的智能拉绳驱动机构包括电机,电机的输出轴上连接有卷轮,拉绳的一端固定在卷轮上,在滑块上固定连接有同步板,所述的同步板位于滑块的下方,在同步板上固定连接有四个绕柱,四个绕柱均匀分布在以同步板中心为圆心的同一个圆周上,拉绳绕过绕柱后连接在靠近红外触摸屏框相应角部的霍尔感应器上,霍尔传感器安装在底板上,同步板的下部与红外触摸屏框相感应,拉绳从卷轮到霍尔传感中间经过拉力计,所述的拉力计的测力端开设有穿绳孔,拉绳从穿绳孔中穿过,拉力计固定连接在移动驱动装置上,所述的电机、红外触摸屏框、拉力计、移动驱动装置均连接至控制器。
进一步的;在霍尔传感器与卷轮之间的拉绳处安装有过渡定滑轮,拉绳从过渡定滑轮上绕过。
进一步的;所述的前后方向的导轨为相互平行的两道,左右方向的导轨两端滑动设置在两道前后方向的导轨上,所述的红外触摸屏框的中心与前后方向的导轨形成的长方形的中心重合。
进一步的;所述的绕柱上安装有转轮,拉绳从转轮上绕过。
进一步的;所述的手柄、支撑手托均水平方向转动安装在滑块上。
进一步的;所述的拉绳先经过过渡定滑轮再经过绕柱,拉力计安装在卷轮与过渡定滑轮之间。
进一步的;所述的移动驱动装置为丝杠,丝杠连接在丝杠驱动电机上,丝杠上配合有丝杠滑块,拉力计固定连接在丝杠滑块上,所述的拉力计为数显拉力计。
进一步的;所述的霍尔传感器包括霍尔集成板,固定轴固定连接在霍尔集成板上,磁铁转动连接在固定轴上,拉绳固定连接在磁铁上。
本发明的积极有益技术效果在于:本训练器结构设计巧妙、体积小,不仅适合专业的训练场所,而且可以家用,采用四个电机驱动可实现各种平面上二维运动路径,适合不同患者及左右手的训练需要,而且本训练器同时具有主动训练、被动训练、阻力训练、助力训练的全部功能,能够满足不同的程度的患者以及同一患者不同康复阶段的训练需要,在主动训练时,本训练器还能够对患者进行有效的保护。
附图说明
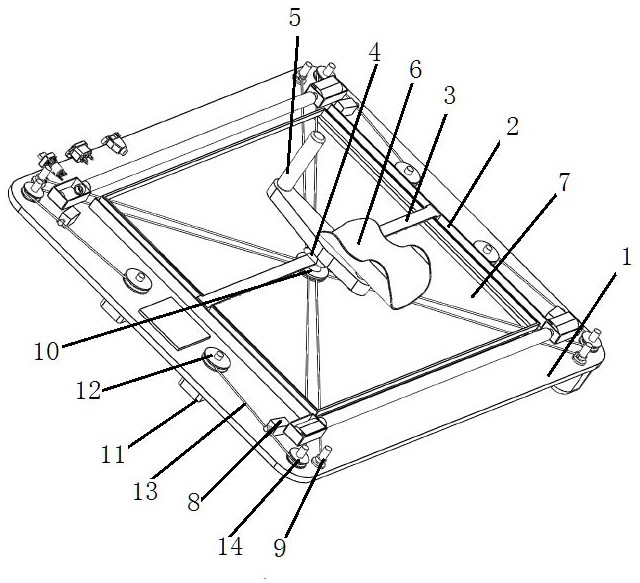
图1是本发明一个方位的示意图。
图2是本发明另一个方位的示意图。
图3是同步板处的示意图。
图4是霍尔传感器处的示意图。
图5是拉力计、移动驱动装置的内部结构示意图。
具体实施方式
为了更充分的解释本发明的实施,提供本发明的实施实例。这些实施实例仅仅是对本发明的阐述,不限制本发明的范围。
结合附图对本发明进一步详细的解释,附图中各标记为:1:底板;2:前后方向的导轨;3:左右方向的导轨;4:滑块;5:手柄;6:支撑手托;7:红外触摸屏框;8:拉力计;801:穿绳孔;802:丝杠;803:丝杠驱动电机;9:霍尔传感器;901:霍尔集成板;902:磁铁;903:固定轴;10:同步板;11:电机;12;卷轮;13:拉绳;13:过渡定滑轮;15:绕柱。
如附图所示,集评估测试和主被动训练的上肢康复训练器,包括底板1,在底板上固定安装有前后方向的导轨2,左右方向的导轨3前后滑动安装在前后方向的导轨上,所述的前后方向的导轨为相互平行的两道,左右方向的导轨两端滑动设置在两道前后方向的导轨上。左右方向的导轨上安装有滑块4,滑块上安装有手柄5、支撑手托6。所述的手柄、支撑手托均水平方向转动安装在滑块上。
在底板上固定安装有红外触摸屏框7,所述的红外触摸屏框的中心与前后方向的导轨四角形成的长方形的中心重合。左右方向的导轨和滑块均位于红外触摸屏框的上方,在红外触摸屏框四个角向外的底板上分别安装有一套智能拉绳驱动机构。
所述的智能拉绳驱动机构包括电机11,电机的输出轴上连接有卷轮12,拉绳13的一端固定在卷轮12上,在滑块4上固定连接有同步板10,所述的同步板10位于滑块的下方,在同步板上固定连接有四个绕柱15,所述的绕柱上安装有转轮,拉绳从转轮上绕过。四个绕柱均匀分布在以同步板中心为圆心的同一个圆周上,拉绳绕过绕柱后连接在靠近红外触摸屏框相应角部的霍尔感应器9上,霍尔传感器安装在底板上,所述的霍尔传感器包括霍尔集成板901,霍尔集成板固定在底板上,固定轴902固定连接在霍尔集成板上,磁铁903转动连接在固定轴902上,拉绳固定连接在磁铁上,本霍尔传感器是现有技术,拉绳带动磁铁旋转,磁铁旋转后霍尔集成板能够探测到磁铁的位置,从而确定拉绳的角度方向,进而计算得到同步带板的位置。在霍尔传感器与卷轮之间的拉绳处安装有过渡定滑轮14,拉绳从过渡定滑轮上绕过。
同步板10的下部与红外触摸屏框相感应,拉绳13从卷轮到霍尔传感中间经过拉力计8,所述的拉力计8的测力端开设有穿绳孔801,拉绳从穿绳孔中穿过,拉力计固定连接在移动驱动装置上,所述的移动驱动装置为丝杠802,丝杠连接在丝杠驱动电机803上,丝杠上配合有丝杠滑块,拉力计固定连接在丝杠滑块上,所述的拉力计为数显拉力计。所述的拉绳先经过过渡定滑轮再经过绕柱,拉力计安装在卷轮与过渡定滑轮之间。拉力计的作用是检测拉绳的张力,以保证设备运行的过程中拉绳的张力始终处于设定的范围内,若拉绳的张力不符合要求,则通过丝杠驱动拉力计移动来实现拉绳张力的调整。拉绳的张力处于设定的范围内能够保证设备的正常运行和位置的正常检测。
所述的电机11、红外触摸屏框7、拉力计8、移动驱动装置均连接至控制器。
本设备使用时,患者握住手柄,小臂位于支撑手托上,即可训练。在移动过程中,同步板与红外触摸屏框进行感应,能够确定滑块的位置,霍尔传感器的信号也能确定滑块的位置,控制器通过读取红外触摸屏框与霍尔感应器的数据进行位置校对,如出现偏差则进行报警,并立即控制电机进行抱闸操作,停止移动,避免误伤使用者。有效的起到对患者的保护作用。特别是在被动模式下训练时保护尤为重要。
本训练器可在被动模式、主动模式、阻力模式、助力模式进行训练:
1、被动模式下,电机处于工作状态,电机通过拉绳带动患者进行上肢训练此时,拉力计处于张紧状态;
2、阻力模式下,电机为辅助,红外触摸屏框根据支撑手托的移动方向,特定的两个电机给予相应的反方向的力,当拉力计数值降低时,两个电机控制卷绳器拉紧绳子,使拉力计维持在特定拉力范围内,保持拉绳的张紧;
3、助力模式下,红外触摸屏框根据支撑手托的移动方向,由特定的两个电机给予相应的加速度,辅助其进行动作,另外两个电机维持绳子的张紧。
4、主动模式下,关闭电机,患者自由训练,拉力计张力保持在设定范围。
在详细说明本发明的实施方式之后,熟悉该项技术的人士可清楚地了解,在不脱离上述申请专利范围与精神下可进行各种变化与修改,凡依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均属于本发明技术方案的范围,且本发明亦不受限于说明书中所举实例的实施方式。
- 集评估测试和主被动训练的上肢康复训练器
- 基于SCARA机器人的主被动上肢康复训练系统及训练方法