一种气动执行机构助力器
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及一种气动执行机构助力器。
背景技术
气动执行机构是一种用来驱动阀门的阀杆进行移动的常见设备,其利用弹性膜片将输入气压转变为对推杆的推力,通过推杆使阀杆产生相应的位移,进而改变阀门的开度;现有的气动执行机构的输出力较小,适用范围较小,若要增大输出力就必须增大气动执行机构的气压腔大小,这就导致体积变大,无法适用于空间有限的区域,导致适用范围更小,有待于进一步改进。
发明内容
针对上述现有技术的现状,本发明所要解决的技术问题在于提供一种能在不增大体积的前提下显著提升气动执行机构的输出力以扩大适用范围的气动执行机构助力器。
本发明解决上述技术问题所采用的技术方案为:一种气动执行机构助力器,其特征在于,包括下支撑板、横向设于下支撑板上方的上支撑板、多个竖直固定在上支撑板与下支撑板之间的立柱、竖直穿插固定在下支撑板中的膜盖连接套、竖直且活动设于膜盖连接套中的转轮导套、同心插入固定在转轮导套上端的导套连接杆以及套设固定在导套连接杆上的转轮压板;所述转轮压板与膜盖连接套的上端间隔一定距离;所述上支撑板的底部还嵌设有竖直并可上下滑动的套筒,所述套筒同心设于转轮压板的上方,所述套筒的内径与转轮压板的外径相互配合,所述套筒的端部还套设固定有端板,所述套筒外还套设有碟簧,所述碟簧的上下两端分别顶紧在上支撑板的底部和端板的顶部;所述下支撑板的顶部还设有多个助力组件,多个所述助力组件沿圆周方向等角度的均匀分布在膜盖连接套的外围并均设于端板的下方;所述助力组件包括杠杆连接杆、直角板和转轮,所述杠杆连接杆竖直固定在下支撑板的顶部,所述直角板的转角处可转动的连接在杠杆连接杆的端部,所述转轮包括两个,两个所述转轮分别可转动的固定在直角板的两端并分别与转轮压板和端板相互配合。
优选地,所述下支撑板的顶部还固定有底座压板,所述底座压板同心套设在膜盖连接套的上端外侧,所述杠杆连接杆竖直插入固定在底座压板中。
优选地,所述上支撑板和下支撑板外部还罩设有可拆卸的防雨帽。
与现有技术相比,本发明的优点在于:本发明在不增大体积的前提下显著提升了气动执行机构的输出力,从而扩大了适用范围。
附图说明
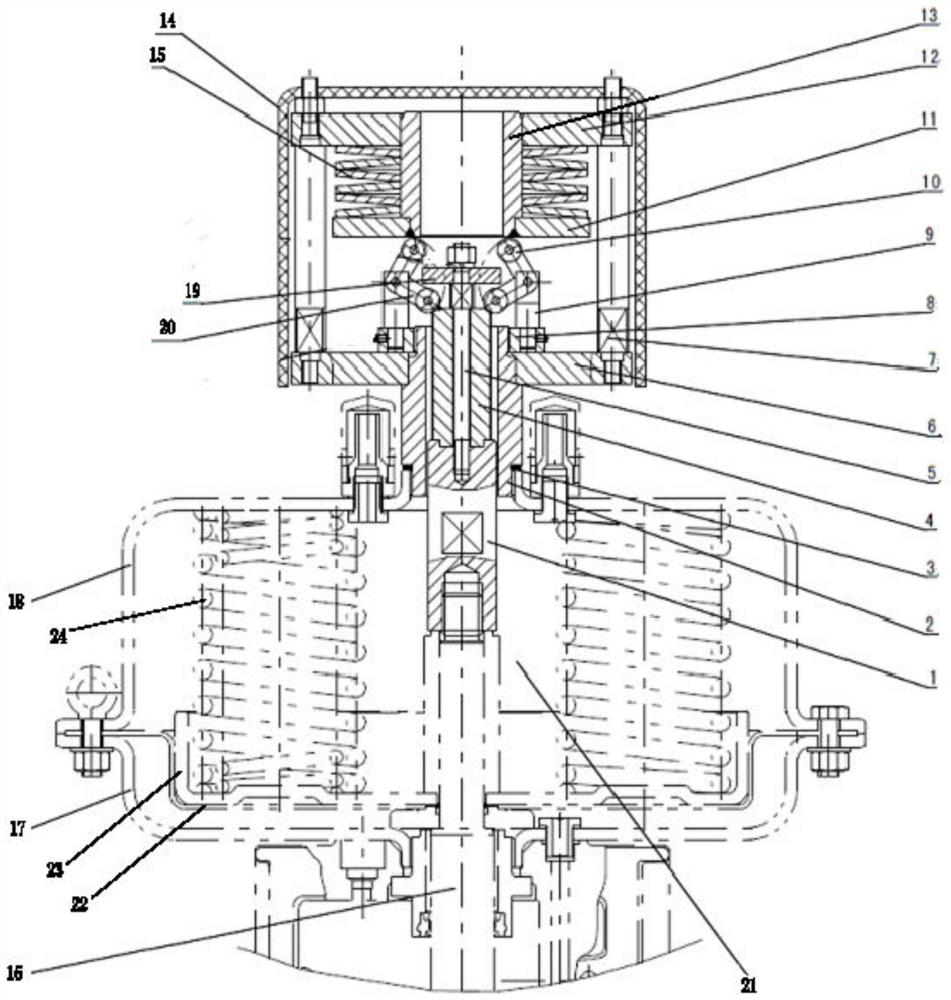
图1为本发明的剖面结构图;
图2为本发明的转轮导套未上移时的两个转轮位置图;
图3为本发明的转轮导套上移后的两个转轮位置图。
具体实施方式
除非另外定义,本发明使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
为了保持本发明实施例的以下说明清楚且简明,本发明省略了已知功能和已知部件的详细说明。
如图1所示,一种气动执行机构助力器,包括下支撑板6、横向设于下支撑板6上方的上支撑板12、多个竖直固定在上支撑板12与下支撑板6之间的立柱7、竖直穿插固定在下支撑板6中的膜盖连接套2、竖直且活动设于膜盖连接套2中的转轮导套4、同心插入固定在转轮导套4上端的导套连接杆5以及套设固定在导套连接杆5上的转轮压板19;转轮压板19与膜盖连接套2的上端间隔一定距离;上支撑板12的底部还嵌设有竖直并可上下滑动的套筒13,套筒13同心设于转轮压板19的上方,套筒13的内径与转轮压板19的外径相互配合,套筒13的端部还套设固定有端板11,套筒13外还套设有碟簧15,碟簧15的上下两端分别顶紧在上支撑板12的底部和端板11的顶部;下支撑板6的顶部还设有多个助力组件,多个助力组件沿圆周方向等角度的均匀分布在膜盖连接套2的外围并均设于端板11的下方;助力组件包括杠杆连接杆9、直角板20和转轮10,杠杆连接杆9竖直固定在下支撑板6的顶部,直角板20的中部可转动的连接在杠杆连接杆9的端部,转轮10包括两个,两个转轮10分别可转动的固定在直角板20的两端并分别与转轮压板19和端板11相互配合。
下支撑板6的顶部还固定有底座压板8,底座压板8同心套设在膜盖连接套2的上端外侧,杠杆连接杆9竖直插入固定在底座压板8中。
上支撑板12和下支撑板6外部还罩设有可拆卸的防雨帽14。
使用时,将膜盖连接套2的下端借助密封件3固定在执行机构21上的上膜盖18的顶部,再将转轮导套4的下端借助推杆连接杆1固定在推杆16的上端。
工作原理;当定位器(或其它控制器)产生的具有一定压力的气源信号从执行机构21上的下膜盖17的底部进气口输入气室后,对气室中的膜片22及托盘23产生一个推力,该推力将执行机构21中的弹簧24压缩,并带动推杆16向上移动,直到弹簧24的反作用力与气源信号压力在膜片22上产生的推力相平衡为止;这时,推杆16的移动距离就是执行机构21的位移,也称行程,执行机构21的最大行程为60mm。
同理,当输入薄膜气室输入信号减小时,执行机构21的弹簧24的弹力大于膜片22上产生的推力,这时在弹簧24的作用下,膜片22及托盘23将带动推杆16向下移动,当输入薄膜气室输入信号减小到为零时,推杆16和膜片22则在弹簧24的弹簧力作用下,返回到初始状态。
初始位置时,碟簧15的反弹力向下通过端板11和多个助力组件传递到转轮导套4上;当推杆16在向上移动时,推杆16会借助推杆连接杆1带动转轮导套4在膜盖连接套2中向上移动,每个直角板20上的其中一个转轮10会卡入到转轮压板19与转轮导套4的上端之间,进而在转轮导套4的带动下向上滚动,从而带动直角板20向上摆动,进而使每个直角板20上的另一个转轮10沿端板11的底部向外滚动,如图2所示。
当直角板20转动到一定角度时,卡在转轮压板19与转轮导套4上端之间的转轮10会向外摆动进而沿转轮导套4的上端外壁滚动,此时的转轮压板19伸入到套筒13中,此时,碟簧15的反弹力完全脱离了转轮导套4,进而使碟簧15的反弹力不再施加在推杆16上,如图3所示。
同理,当推杆16向下移动时,会带动转轮压板19下移,进而将直角板20上的位于内侧的一个转轮10向下带入到转轮压板19与转轮导套4的上端之间,从而使碟簧15的反弹力借助直角板20和另一个转轮10传递到转轮导套4的上端,进而对推杆16增加一个额外的作用力以起到有效的助力作用;当转轮导套4下移到底时,碟簧15的反弹力会持续向下输出给推杆16。
本发明在不增大体积的前提下显著提升了气动执行机构的输出力,从而扩大了适用范围。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的技术人员应当理解,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行同等替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神与范围。
- 一种气动执行机构助力器
- 一种真空助力器结构、真空助力器总成及具有其的移动体