全自动定子绕线机
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及电机加工设备领域,特别涉及一种用于在电机的定子骨架上制作线圈的全制动定子绕线机。
背景技术
电机由转子组件和定子组件构成,其中,定子组件中包括铁芯和绕线骨架。为了便于绕线工艺,现有技术中提出了结构如下的绕线方法:将绕线骨架沿周向分割为如图4所示的多个定子绕线骨架,将定子绕线骨架上绕好线圈后,再装配到铁芯上以完成定子组件的制造。这样就需要提供一种能够将绕线绕接在定子绕线骨架上的绕线机,所以为了满足这种新型的绕线工艺,现提供一种全自动定子绕线机来实现这样的定子组件的制造。
发明内容
为了解决上述技术问题,本发明的目的是提供一种加工效率高的全自动定子绕线机。
为了实现上述发明目的,本发明采用如下技术方案:一种全自动定子绕线机,包括:
机座;
绕线机构,支撑在所述机座上,所述的绕线机构包括固定安装在所述机座上的第一支撑台和第二支撑台、安装在所述第一支撑台上且能够绕一水平轴心线转动的第一转动夹持部、驱动所述第一转动夹持部绕所述水平轴心线转动的第一电机、安装在所述的第二支撑台上且与所述第一转动夹持部相对的第二转动夹持部、能够驱动所述第二夹持头朝向或背离所述第一转动夹持部移动的第一气缸以及可被夹持在所述的第一转动夹持部与所述第一转动夹持部之间并能随着所述第一转动夹持部一起绕着所述水平轴心线转动的绕线工装治具;
送线机构,所述的送线机构安装在所述的机座上并且位于所述绕线机构的一侧,所述的送线机构包括具有轨道的底座、支撑在所述底座上并且能够沿所述轨道移动的机架、用于调节绕线张力的张力调节器以及转动安装在所述机架上且用于将所述绕线朝向所述绕线机构方向传送的若干线轮,所述轨道的延伸方向与所述的水平轴心线方向平行。
剪线机构,设置在靠近所述第一转动夹持部的一侧。
上述技术方案中,优选的,一个所述的线轮与一第二气缸相连接,所述的第二气缸能够驱动所述的线轮沿垂直于所述绕线移动方向的方向运动,以实现调节所述绕线的松紧度。
上述技术方案中,优选的,所述的张力调节器包括若干上调节轮和若干下调节轮,所述的若干上调节轮和若干下调节轮上下交错分布并且二者之间限定一供所述绕线经过的通道,所述的若干上调节轮安装在一能够上下移动的安装板上,在所述安装板被驱动上下移动时,所述通道的宽度被改变。
上述技术方案中,优选的,所述的机架上安装有能够供用户手动驱动所述安装板上下移动的调节旋钮。
上述技术方案中,优选的,所述绕线工装治具包括可拆卸的安装在所述第一转动夹持部上的第一绕线座、可拆卸的安装在所述第二转动夹持部上的第二绕线座以及夹紧在所述第一绕线座和第二绕线座之间的骨架支撑座,所述的骨架支撑座包括多个用于固定定子绕线骨架的支撑部以及位于相邻两个所述支撑部之间的隔离部。
上述技术方案中,优选的,所述的第一转动夹持部上设置有供所述绕线滑入的缺口,所述的缺口内设置有用于夹持所述绕线一端部的夹线机构,所述的夹线机构与一第三气缸相传动连接。
上述技术方案中,优选的,所述的剪线机构同时设置在所述的缺口处,所述的剪线机构也与所述第三气缸相传动连接。
上述技术方案中,优选的,所述的第三气缸安装在所述的第一支撑台上。
本发明的全自动定子绕线机,将绕线绕接的复杂的定子铁芯改良成简单的定子绕线骨架,然后配合分体骨架组合成一个定子组件,改变了直接将绕线绕接在定子铁芯骨架上的绕线生产方法,为定子组件提供了另一种新型简单的制作方法,让使用本发明全自动定子绕线机的企业提高了定子组件的生产效率还节俭了成本。
附图说明
附图1是本发明全自动定子绕线机的外部结构图;
附图2是本发明全自动定子绕线机的内部结构图;
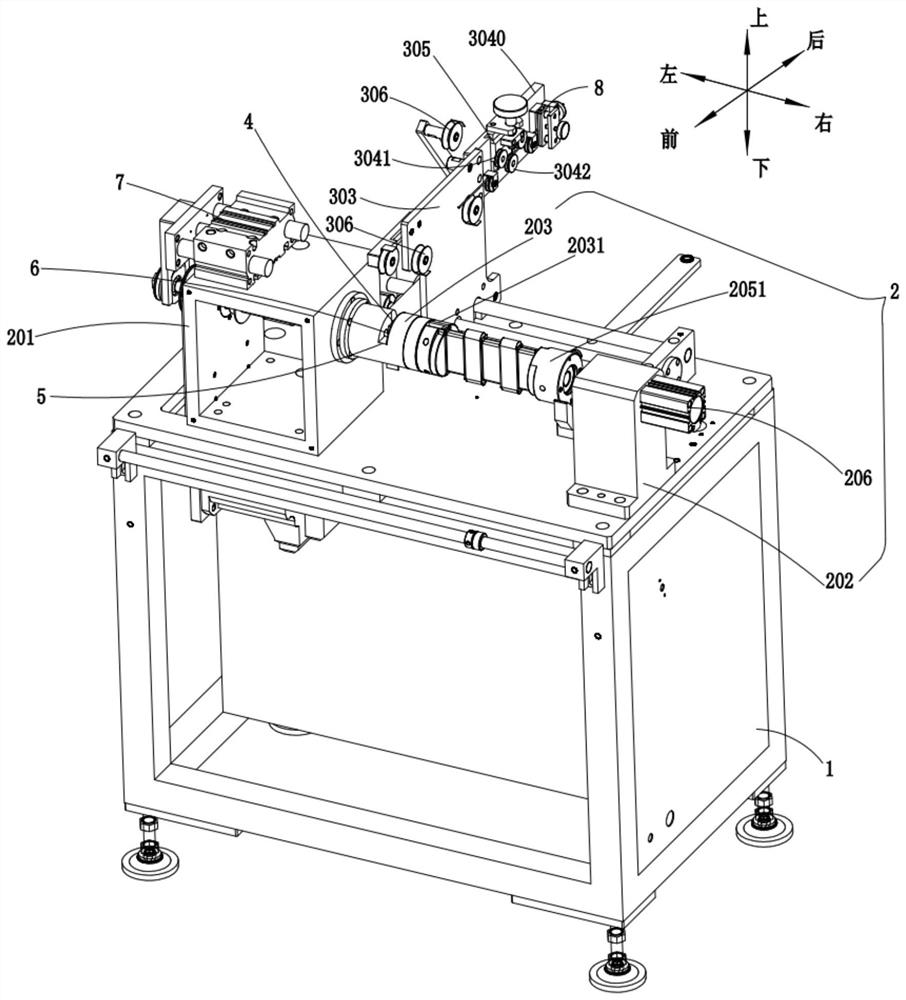
附图3是本发明全自动定子绕线机的主要工作部件的结构图;
附图4是将由全自动定子绕线机制作的、载有绕线的三个绕线骨架装配到铁芯上的示意图;
其中:1、机座;101、防护罩;102、操作盒;2、绕线机构;201、第一支撑台;202、第二支撑台;203、第一转动夹持部;2031、第一绕线座;204、第一电机;2040、同步轮;2041、从动轮;2042、转向轴;2043、皮带;2044、键;205、第二转动夹持部;2051、第二绕线座;2052、第二夹持头;206、第一气缸;207、绕线工装治具;208、定子绕线骨架;2071、骨架支撑座;2072、支撑部;2073、隔离部;3、送线机构;300、第二电机;3001、滚珠丝杆;3002、滑块;301、底座;302、轨道;303、机架;304、张力调节器;3040、连接板;3041、上调节轮;3042、下调节轮;305、安装板;306、线轮;307、第二气缸;308、调节旋钮;4、剪线机构;5、缺口;6、夹线机构;7、第三气缸;8、入口调整组;9、铁芯。
具体实施方式
为详细说明发明的技术内容、构造特征、所达成的目的及功效,下面将结合实施例并配合附图予以详细说明,其中,本实施例中所述的“上”、“下”、“左”、“右”、“前”、“后”与附图2中所示的全自动定子绕线机的各个位置关系一一对应。
附图1所示,全自动定子绕线机包括放置于平面的一机座1,机座1上方设有一个防护罩101,防护罩101滑动设置在机座1上,防护罩101后上方设有一操作盒102。工人操作绕线机时,在操作盒102上对全自动定子绕线机设置相关参数后开始绕线工作。
附图2和附图3所示,在机座1上方设有绕线机构2,绕线机构2包括机座1上设有的第一支撑台201、第二支撑台202、第一转动夹持部203、第一电机204、第二转动夹持部205、第一气缸206和绕线工装治具207。
在第一支撑台201下方安装有用于驱动的第一电机204,第一电机204的传动轴传动连接与其转动配合的同步轮2040,而同步轮2040通过皮带2043连接与同步轮2040上方设有的从动轮2041,从动轮2041又通过键2044传动连接于设置于第一支撑台201的转向轴2042,从而实现了第一电机204的传动轴带动转向轴2042一起的转动运动。而转向轴2042转向连接于第一支撑台201右侧设有的第一转向夹持部203,使得第一转向夹持部203随第一电机204做绕一水平轴心线的转动运动。
在第二支撑台202上安装有第二转动夹持部205,第二转动夹持部205与第一转动夹持部203为同一前后位置设有的一组相对转动夹持部。在第二支撑台202右侧设置有第一气缸206,第一气缸206能驱使第二转动夹持部座205上设有的第二夹持头2052在左右方向上做朝向或背离第一转动夹持部203的移动。
在第一转动夹持部203和第二转动夹持部205中间还设有一可被两转动夹持部夹持的绕线工装治具207,该绕线工装治具207能随第一转动夹持部203一起做绕一水平轴心线的转动运动。
绕线工装治具207包括第一绕线座2031、第二绕线座2051、骨架支撑座2071。第一绕线座2031为可拆卸安装在第一转动夹持部203上的部件,第二绕线座2051为可拆卸安装在第二转动夹持部205的部件,而第一绕线座2031和第二绕线座2051之间夹紧设有一骨架支撑座2071。骨架支撑座2071上包含有多个用于固定定子绕线骨架208的支撑部2072和位于两支撑部2072之间的隔离部2073。当每次绕线工作开始前支撑部2072上都会放置有定子绕线骨架208,当定子绕线骨架208随绕线工装治具207安装于绕线机后,完成绕线工作后,定子绕线骨架208会从绕线工装治具207上拆卸下来,重新放置未绕线的定子绕线骨架208在绕线工装治具207上,再次将绕线工装治具207安装于机器上后再次开始绕线工作。
在绕线工装治具207左侧的第一转向夹持部203上还设有可供绕线滑入的缺口5。在缺口5处设有用于夹持绕线的夹线机构6,夹线机构6与固定安装在第一支撑台201上的第三气缸7传动连接。在缺口5处同样也设有一剪线机构4,剪线机构4也与第三气缸7相传动连接。
在机座1上方还设有送线机构3,送线机构3平行设置于绕线机构2的后方。送线机构3包括有第二电机300、底座301、轨道302、机架303、张力调节器304、安装板305、线轮306、第二气缸307和调节旋钮308。
在机座1上方的左右两侧固定连接有两底座301,在两侧底座301之间设有两轨道302,轨道302平行于绕线机构2的轴线。在左侧底座301上固定有第二电机300,第二电机300的滚珠丝杆3001连接左右两侧的底座301,且滚珠丝杆3001位于两导轨302中间,滚珠丝杆3001上设有可在滚珠丝杆3001的左右方向滑动的滑块3002,滑块3002固定连接其上方设有的机架303,可使机架303随滑块3002在轨道302上左右移动,实现送线机构3在送线时的位置改变。
在机架303上固定有一连接板3040,在连接板3040上设有螺纹连接的调节旋钮308,和通过调节旋钮308可上下调节的安装板305。在连接板3040上转动连接有若干下调节轮3042,在安装板305上转动连接有若干上调节轮3041,若干上调节轮3041和若干下调节轮3042之间限定了一条可供绕线经过的通道。通过调节旋钮308调节安装板305的上下位置,带动若干上调节轮3041也改变了上下位置,从而改变了通道的宽度,实现了全自动定子绕线机可缠绕不同规格的绕线的设定。
在机架303的左侧设有一张力调节器304,张力调节器304包含有固定连接于滑块3002的第二气缸307,和位于第二气缸307上方的一线轮306。该线轮306通过第二汽缸307的控制来实现垂直于绕线移动方向的调节,进而实现了对绕线松紧度的调节。
在机架303上还转动安装有若干线轮306,绕线经过后方张力调节器304后传动经过这些线轮306来到第一转动夹持部203处的缺口5。在机架303固定连接的连接板3040后端部还设有绕线的入口调节组8,入口调整组8在全自动定子绕线机上限定了一个绕线的入口位置。
下面介绍全自动线圈绕线机的工作原理:
当骨架支撑座2071上安装好空的定子绕线骨架208后,与骨架支撑座2701左侧的第一绕线座2301和右侧的第二绕线座2501组装好后形成了绕线工装治具207,通过控制第一气缸206控制第二转动夹持部205,将绕线工装治具207转动安装在第一转动夹持部203和第二转动夹持部205之间,然后将绕线穿过机架303后方设有的入口调整组8,将绕线穿过送线机构3处设有的若干上调节轮3041和若干下调节轮3042之间形成的通道后来到张力调节器304处,再将绕线穿过张力调节器304上方的线轮306后来到机架303上的其余若干线轮306后,绕线来到夹头机构6处,通过第三气缸7将绕线夹紧于夹线机构6处的缺口5,关好防护罩101,在操作盒102上设定好相关工作信息后,启动全自动定子绕线机,绕线机的第一电机204和第二电机300开始运行。
第一电机204开始顺时针转动带动上方设有的转向轴2042一起转动,使得绕线机构2开始做绕一水平轴心线的顺时针转动,与此同时第二电机300上的滚珠丝杆3001开始转动,带动滑块3002和送线机构3做整体向右的位移。
当滚珠丝杆3001做顺时针转动时,绕线机构2的第一绕线座2031上开始缠绕有的绕线,当绕线经过第一绕线座2031上设有的凸销后来到左侧定子绕线骨架208时,滚珠丝杆3001做一逆时针转动,带动滑块3002做一小段向左位移,使绕线卡于左侧定子绕线骨架208的左侧起始位置,滚珠丝杆3001调整为高速顺时针转动,带动送线机构3在轨道302位置上向右移动,使得转动的左侧定子绕线骨架208上高速缠绕有绕线。
当左侧定子绕线骨架208上缠绕好线后,滚珠丝杆3001调整为慢速顺时针转动,带动送线机构3来到平行于中间定子绕线骨架208的位置处,滚珠丝杆3001做一逆时针转动,带动滑块3002做一小段向左位移,使绕线卡于中间定子绕线骨架208的左侧起始位置,随后滚珠丝杆3001调整为高速顺时针转动,带动送线机构3在轨道302上向右移动,使得转动的中间定子绕线骨架208上高速缠绕有绕线。
当中间定子绕线骨架208上缠绕好绕线后,滚珠丝杆3001调整为慢速顺时针转动,带动送线机构3来到平行于右侧定子绕线骨架208的位置处,滚珠丝杆3001做一逆时针转动,带动滑块3002做一小段向左位移,使绕线卡于右侧定子绕线骨架208左侧起始位置,随后滚珠丝杆3001调整为高速顺时针转动,带动送线机构3在轨道302上向右移动,使得转动的右侧定子绕线骨架208上高速缠绕有绕线。
随后滚珠丝杆3001调整为慢速顺时针转动,带动送线机构3缓慢的将绕线缠绕于第二绕线座2051上一周后,此时绕线工装治具207上的定子绕线骨架208上缠绕有一层绕线,滚珠丝杆3001再做一逆时针转动,带动送线机构3向左位移一定间距,将绕线卡在第二绕线座2051上的凸销上一侧,然后第一电机204的顺时针转动调整为逆时针转动,并转动一定角度,然后滚珠丝杆3001慢速顺时针转动,带动送线机构3向右位移一定距离,让绕线随送线机构3来到第二绕线座2051上凸销的另一侧且绕接于第二绕线座2051的凸销上,随后第一电机204的转动为逆时针转动,从而让绕线机构2做逆时针转动,而滚珠丝杆3001接着做顺时针转动让送线机构3将绕线缠绕于第二绕线座2051上几圈后,然后滚珠丝杆3001再做慢速逆时针转动,送线机构3通过滚珠丝杆3001的逆时针转动开始做整体向左移动。
当送线机构3来到平行于右侧定子绕线骨架208时,滚珠丝杆3001做一顺时针转动,带动滑块3002做一小段向右位移,使绕线卡于右侧定子绕线骨架208的右侧起始位置,滚珠丝杆3001调整为高速逆时针转动,带动送线机构3在轨道302上向左移动,使得转动的右侧定子绕线骨架208上高速缠绕有绕线。
当右侧定子绕线骨架208上缠绕好绕线后,滚珠丝杆3001调整慢速逆时针转动,带动送线机构3来到平行于中间定子绕线骨架208的位置处,滚珠丝杆3001做一顺时针转动,带动滑块3002做一小段向右位移,使得绕线卡于中间定子绕线骨架208的右侧起始位置,随后滚珠丝杆3001调整为高速逆时针转动,带动送线机构3在轨道302上向左移动,使得转动的中间定子绕线骨架208上高速缠绕有绕线。
当中间定子绕线骨架208上缠绕好绕线后,滚珠丝杆3001调整为慢速逆时针转动,带动送线机构3来到平行于左侧定子绕线骨架208的位置,滚珠丝杆3001做一顺时针转动,带动送线机构3做一小段向右位移,使得绕线卡于左侧定子绕线骨架208的右侧起始位置,随后滚珠丝杆3001调整为高速逆时针转动,带动送线机构3在轨道302上向左移动,使得转动的左侧定子绕线骨架208上高速缠绕有绕线。
当绕线工装治具207上的若干定子绕线骨架208缠绕有第二层绕线后,滚珠丝杆3001调整为慢速逆时针转动,带动送线机构3慢速向左移动,将绕线缠绕于第一绕线座2031上一圈,此时位于第一转动夹持部203一侧的夹线机构6松开夹紧的绕线开始端,滚珠丝杆3001继续慢速逆时针转动带着绕线回到缺口5处,同时第一绕线座2031上缠绕有第二圈绕线。
当绕线进入缺口5后,缺口5内的夹线机构4和剪线机构6开始工作,将返回的绕线夹紧于缺口5处,同时剪断从绕线机构2返回过来的绕线,剪线机构4的刀头自动弹回去,而此时刀头一侧的原始的绕线开始端与剪断的从绕线机构2回来绕线剪断端的两个端部散落在缺口5内,而缺口5另一侧的夹线机构4依旧夹紧着后方的新绕线的开始端部,此时全自动定子绕线机停止运行。
工人拉开防护罩101通过第一气缸206的控制将绕线工装治具207从机器上取下,然后将已缠绕有两层绕线的若干定子绕线骨架208从绕线工装治具207上取下,放置空的定子绕线骨架208在绕线工装治具207上,再次将绕线工装治具207安装于第一转动夹持部203和第二转动夹持部205中间后,关好防护罩101,全自动定子绕线机再次开始运转继续绕线。
附图4所示,当绕好线后的若干组定子绕线骨架208从绕线工装治具207上取下后,将这些绕好线的定子绕线骨架208安装于定子的铁芯9上,即可完成一个定子组件的制造。
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
- 用于定子绕线机的张力衰减机构及定子绕线机
- 一种全自动分体式定子多飞叉绕线机