测土样数据配置液体肥和水的比例并进行施肥的移动小车
文献发布时间:2023-06-19 09:30:39
技术领域
本发明属于土壤检测和土壤施肥技术领域,具体涉及一种施肥小车。
背景技术
目前小车在作业时使用的都是传统的固体肥,固体肥对小车的装载重量要求高,同时还对储存仓的位置设计有所要求,以防止增加劳动强度。许多施肥车在技术上作出了一些改进,比如ZL201820581478.1的施肥小车专利设计了研磨装置,但施肥时仅是把固体肥水混合液洒在地面上,土壤对肥水混合液的吸收效率极差;ZL201720734566.6的施肥车和 ZL201820734271.3的施肥小车,采用手推车进行施肥,一定程度上的确减少劳动力投入,但是仍然需要人力去辅助施肥作业,无法实现施肥车的自动移动。以上施肥小车本身均无法进行自动土样检测并自动配置,耗费时间长,劳动力投入大。
发明内容
针对现有技术的不足,本发明的目的在于以土壤采样装置和检测集成模块主要结构,以检测土壤的湿度、pH值、温度等数据信息,自动配置肥水比例,从而达到高效自动施肥的功能。
为解决以上问题,本发明采用如下技术方案:
测土样数据配置液体肥和水的比例并进行施肥的移动小车,由驱动小车(1)、探测针(2)、土壤采样机(3)、传感检测集成模块(4)、中央处理器(5)、水箱(6)、液体肥母液箱(7)、肥水混合箱(8)、第一阀门(9)、第二阀门(10)、第三阀门(11)、土壤出水孔 (12)、叶面喷洒装置(13)、搅拌装置(14)、进水口(15)组成;所述的探测针(2)位于传感检测集成模块(4)下方且在驱动小车(1)左右两端各有一个;所述的土壤采样机(3) 位于传感检测集成模块(4)下方且在驱动小车(1)左右两端各有一个,内置浊度传感器和压力传感器,所有压力传感器均设置在同一高度,浊度传感器设有x个(x>2),均设置在同一个高度,且浊度传感器的高度低于压力传感器的高度;中央处理器(5)位于传感检测集成模块(4)上方;叶面喷洒装置(13)位于驱动小车(1)侧部;土壤出水孔(12)位于驱动小车(1)底部;第一阀门(9)有两个,均位于肥水混合箱(8),连接着水箱(6)和液体肥母液箱(7);第二阀门(10)有两个,分别位于肥水混合箱(8)的底部和侧部各一个,分别连接土壤出水孔(12)和叶面喷洒装置(13);第三阀门(11)和进水口(15)位于土壤采样机(3)中;搅拌装置(14)位于肥水混合箱(8)中;
所述的水箱(6)和液体肥母液箱(7)的体积比至少为40:1;
所述的探测针(2)为圆柱形,半径:0.8cm,最大伸缩长度:40cm;
所述的土壤采样机(3)最大伸缩长度:50cm;
所述的叶面喷洒装置(13)高度:1m,旋转角度:0°-120°;
所述的土壤出水孔(12)最大伸缩长度:30cm。
本发明探测的原理为:
1.探测针(2)内装有pH传感器、温度传感器和湿度传感器。pH传感器通常产生双极性电压输出,在玻璃膜与被测溶液中氢离子进行离子交换过程中,通过测量电极之间的电位差,来检测溶液中的氢离子浓度;温度传感器利用温度不同而使得电阻值不同;土壤水分检测利用水的介电常数与空气的差别来确定水分含量。各个传感器根据检测到的数据由ADC模块转换成电压数据传输给中央处理器(5);
2.土壤采样机(3)内设有浊度传感器和压力传感器。压力传感器采用压敏电阻的原理,当压力变化时压敏电阻发生相应的变化,从而通过ADC模块转换成相应的电压数据;浊度传感器利用光学原理,通过液体溶液中的透光率和散射率来判断综合的浊度情况,当光线一定时,光线的透过量取决于溶液浑浊程度,接收端将透过的光的强度由ADC模块转换为电压的大小,根据接收端的电压大小来计算浑浊程度传输给中央处理器(5),中央处理器(5)再根据浑浊程度来判断土壤的机械组成的类别。
本发明的有益效果为:
1.施肥方式为自动施肥,自动检测土壤pH、湿度等数据,并通过算法自动进行配置和搅拌混合,自动进行土地施肥和叶面施肥。
2.本发明采用了土壤施肥和叶面施肥两种施肥方式,施肥范围广,施肥效率高。
附图说明
下面结合附图及其实施例对本发明作进一步说明。
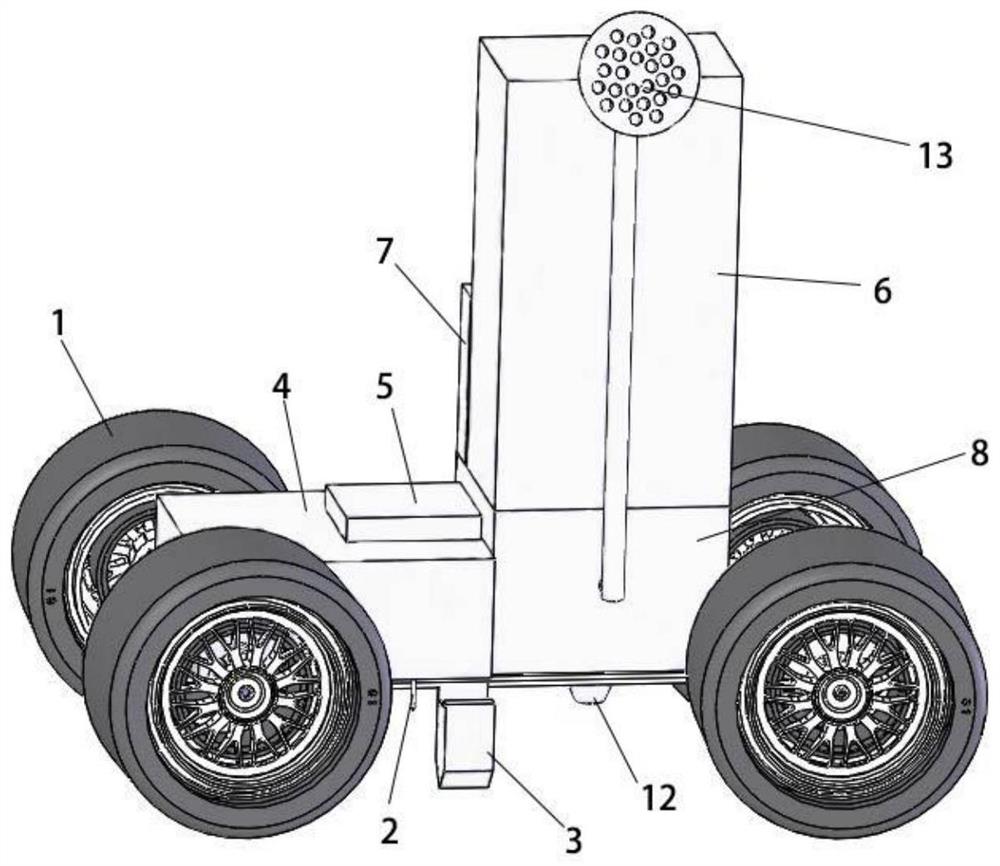
图1是移动小车结构示意图;
图2是移动小车正视图;
图3是移动小车第一阀门、第二阀门示意图;
图4是移动小车肥水混合箱内部示意图;
图5是土壤采样机剖面图;
1为驱动小车、2为探测针、3为土壤采样机、4为传感检测集成模块、5为中央处理器、 6为水箱、7为液体肥母液箱、8为肥水混合箱、9为第一阀门、10为第二阀门、11为第三阀门、12为土壤出水孔、13为叶面喷洒装置、14为搅拌装置、15为进水口。
具体实施方式
以下结合本发明的结构和工作原理作详细说明:
如图1所示,本发明包括驱动小车(1)、探测针(2)、土壤采样机(3)、传感检测集成模块(4)、中央处理器(5)、水箱(6)、液体肥母液箱(7)、肥水混合箱(8)、第一阀门(9)、第二阀门(10)、第三阀门(11)、土壤出水孔(12)、叶面喷洒装置(13)、搅拌装置(14)、进水口(15)组成,驱动小车(1)上装有两个探测针(2)分别位于两端,呈圆柱形,半径:0.8cm,最大伸缩长度:40cm,其目的是充分插入土中以获得pH、湿度等可靠数据;土壤采样机(3)分别位于驱动小车(1)两侧且位于传感检测集成模块(4)下方,最大伸缩长度:50cm,保证收集到足够的土壤样本;土壤采样机(3)内设有浊度传感器和压力传感器,两侧压力传感器设置在同一高度,保证两侧的进水口均到达同一水位后停止注水,浊度传感器有x个(x>2),均设置在同一高度,来检测液体浊度;当两侧的土壤采样机 (3)伸长收集土壤样本时,第三阀门(11)紧闭,保证采集到少量的土壤样本;当采样结束后,两侧的第三阀门(11)打开,同时由进水口(15)注入储存的水至同一高度,静置x秒后(x>4),两侧土壤采样机(3)内的浊度传感器多次检测液体浊度,将两侧检测到的数据传给中央处理器(5),由中央处理器(5)根据浊度来判断土壤机械组成的类别;中央处理器(5)位于传感检测集成模块(4)上方,将收集到的数据进行分析,计算出肥水比例,控制第一阀门(9)由水箱(6)和液体肥母液箱(7)向肥水混合箱(8)进行肥输送,由于液体肥的浓缩度较高,水箱(6)和液体肥母液箱(7)的体积比至少为40:1;肥水混合箱(8) 内部传感器检测到一定水位搅拌装置(14)则进行自动搅拌x秒(x>3),以加快溶解混合速度;搅拌结束后土壤出水孔(12)将进行伸缩,将肥水混合液施肥于土下,最大伸缩长度: 30cm,其目的是保证肥料施于土下,使土壤充分吸收肥料;肥水混合液通过肥水混合箱(8) 底部和侧部的第二阀门(10)由土壤出水孔(12)和叶面喷洒装置(13)对土壤和叶面分别进行施肥;叶面喷洒装置(13)在喷洒的同时进行自动旋转,高度:1m,旋转角度:0°-120°,其目的是增大施肥范围和面积。
- 测土样数据配置液体肥和水的比例并进行施肥的移动小车
- 测土样数据配置液体肥和水的比例并进行施肥的移动小车