一种水利工程用输水沟沟壁刮扫机器人
文献发布时间:2023-06-19 09:38:30
技术领域
本发明涉及水利工程技术领域,尤其涉及一种水利工程用输水沟沟壁刮扫机器人。
背景技术
水利工程是用于控制和调配自然界的地表水和地下水,达到除害兴利目的而修建的工程,也称为水工程,水是人类生产和生活必不可少的宝贵资源;
对于输朱水沟沟渠通常需要大量的人力来进行清理,尤其对于沟壁,有的沟渠侧壁为倾斜式的,刮扫时刷毛不能贴合侧壁,难以清扫干净,清扫后的垃圾还需取出,十分麻烦,故而提出了一种水利工程用输水沟沟壁刮扫机器人来解决上述问题。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种水利工程用输水沟沟壁刮扫机器人。
为了实现上述目的,本发明采用了如下技术方案:
一种水利工程用输水沟沟壁刮扫机器人,包括设置在沟渠两侧的两个第一安装板,两个所述第一安装板位于沟渠上方,两个所述第一安装板内均设有第一安装槽,所述第一安装槽上侧壁设有多个等间距的卡块,两个所述第一安装板之间设有第一连接板,所述第一连接板两端均贯穿第一安装板侧壁并位于第一安装槽内,所述第一连接板内设有第二安装槽,所述第一连接板两端均设有限位块,所述限位块与卡块相互配合,所述限位块下端贯穿第一连接板的侧壁并连接有第一弹簧,所述第一弹簧远离限位块的一端固定连接在第二安装槽侧壁上,所述限位块下端侧壁设有第一齿条,所述第二安装槽内设有第一转动杆,所述第一转动杆通过轴承设置在第二安装槽侧壁上,所述第一转动杆两端均固定套设有第一齿轮,所述第一齿轮与第一齿条相互配合,所述第一连接板中间位置设有操作杆,所述操作杆下端贯穿第一连接板并连接有第二弹簧,所述第二弹簧的另一端连接在第二安装槽侧壁上,所述第一转动杆中间位置固定套设有第二齿轮,所述操作杆的下端侧壁设有第二齿条,所述第二齿条和第二齿轮相互啮合;
两个所述第一安装板下端均转动连接有第二安装板,两个所述第二安装板侧壁上均设有吸尘机构,所述吸尘机构包括吸尘盒,所述吸尘盒连接在第二安装板的侧壁上,所述第二安装板的侧壁上设有吸尘板,所述吸尘板内设有空腔,所述吸尘板通过软管和吸尘盒相连,所述吸尘盒的侧壁设有电机,所述电机输出轴连接有转动叶,所述吸尘盒内设有滤网,所述吸尘盒上设有输出通道,所述输出通道与吸尘盒内相通;
所述第二安装板上设有清扫机构,所述清扫机构包括第二转动杆,所述第二转动杆贯穿第二安装板并通过轴承设置在第二安装板上,所述第二转动杆和电机的输出轴上均设有传动轮,并且两个传动轮通过传动带相连,所述第二安装板上设有第三转动杆,所述第三转动杆通过轴承设置在第二安装板的侧壁上,所述第三转动杆上套设有转动辊,所述转动辊上套设有刷毛,所述第三转动杆上端设有第一锥齿轮,所述第二转动杆远离传动轮的一端设有第二锥齿轮,所述第二锥齿轮与第一锥齿轮相互啮合,所述第二安装板上设有滑槽,所述滑槽内设有滑动板,所述滑动板下端连接有第三弹簧,所述第三弹簧远离滑动板的一端固定连接在滑槽侧壁上,所述滑动板上端固定连接有第一磁铁,所述第二转动杆上固定连接有第二磁铁,所述第二磁铁与第一磁铁相互配合。
优选地,两个所述第二安装板下端之间设有第三安装板,所述第三安装板内设有两个第三安装槽,两个所述第二安装槽内均设有移动杆,所述移动杆一端贯穿第三安装板侧壁并转动连接在第二安装板侧壁上,所述移动杆另一端连接有第四弹簧,所述第四弹簧的另一端连接在第三安装槽的侧壁上。
优选地,两个所述第二安装板下端均连接有第四安装板,所述第四安装板下侧壁连接有多个第一滚轮。
优选地,所述转动辊上设有两个第二滚轮,所述第二滚轮与沟渠侧壁相切。
优选地,所述第一磁铁上端为N极,所述第二磁铁上端为N极。
优选地,所述吸尘板对着刷毛一端设有吸尘口,所述滑动板为齿形板。
与现有的技术相比,本装置的优点在于:
1、本发明通过设置第一安装板、与第一安装板转动连接的第二安装板、第一转动杆、第一连接板、第三安装板等机构,可以根据沟渠倾斜的角度调整转动辊的角度,使得刷毛能与沟渠侧壁贴合,更好的实现对不同角度沟渠侧壁的清洁。
2、本发明通过设置吸尘机构和清扫机构,使得清扫之后的垃圾等杂物,会被吸尘板的吸尘口吸入,通过软管到达吸尘盒内,通过滤网隔离,使得杂物能留在吸尘盒内,而水和空气会通过输出通道流出。
3、本发明通过设置清扫机构、第一磁铁、第二磁铁等机构,实现第二转动杆转动,使得第一磁铁和第二磁铁能间歇式吸引,实现滑动板抖动,滑动板为齿形板,能够将刷毛进行清理,保证刷毛的整洁程度。
附图说明
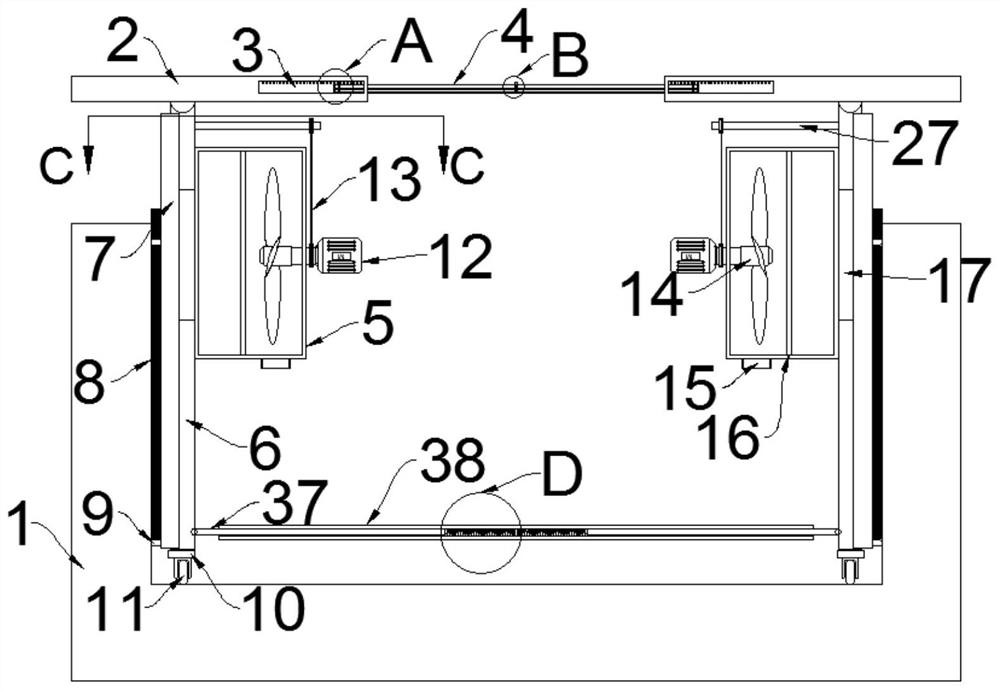
图1为本发明提出的一种水利工程用输水沟沟壁刮扫机器人的结构示意图。
图2为图1中A处结构放大图。
图3为图1中B处结构放大图。
图4为图1中D处结构放大图。
图5为图1的C-C向截面图。
图6为图5中E处结构放大图。
图7为滑槽截面图。
图8为图7中F处结构放大图。
图9为第四安装板和第一滚轮侧视图。
图中:1沟渠、2第一安装板、3第一安装槽、4第一连接板、5吸尘盒、6第二安装板、7吸尘板、8刷毛、9第二滚轮、10第四安装板、11第一滚轮、12电机、13传动带、14转动叶、15输出通道、16滤网、17软管、18卡块、19限位块、20第一齿条、21第一齿轮、22第一弹簧、23操作杆、24第二齿条、25第二齿轮、26第二弹簧、27第二转动杆、28转动辊、29第三转动杆、30第一锥齿轮、31第二锥齿轮、32第二磁铁、33滑动板、34滑槽、35第三弹簧、36第一磁铁、37移动杆、38第三安装板、39第三安装槽、40第四弹簧、41第一转动杆。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参照图1-9,一种水利工程用输水沟沟壁刮扫机器人,包括设置在沟渠1两侧的两个第一安装板2,两个第一安装板2位于沟渠1上方,两个第一安装板2内均设有第一安装槽3,第一安装槽3上侧壁设有多个等间距的卡块18,两个第一安装板2之间设有第一连接板4,第一连接板4两端均贯穿第一安装板2侧壁并位于第一安装槽3内,第一连接板4内设有第二安装槽,第一连接板4两端均设有限位块19,限位块19与卡块18相互配合,限位块19下端贯穿第一连接板4的侧壁并连接有第一弹簧22,第一弹簧22远离限位块19的一端固定连接在第二安装槽侧壁上,限位块19下端侧壁设有第一齿条20,第二安装槽内设有第一转动杆41,第一转动杆41通过轴承设置在第二安装槽侧壁上,第一转动杆41两端均固定套设有第一齿轮21,第一齿轮21与第一齿条20相互配合,第一连接板4中间位置设有操作杆23,操作杆23下端贯穿第一连接板4并连接有第二弹簧26,第二弹簧26的另一端连接在第二安装槽侧壁上,第一转动杆41中间位置固定套设有第二齿轮25,操作杆23的下端侧壁设有第二齿条24,第二齿条24和第二齿轮25相互啮合,通过按住操作杆23可以实现与限位块19的联动,按住操作杆23即可调整第一连接板4在第一安装槽3内的位置,放开操作杆23,限位块19即可在第一弹簧22的作用下弹出,卡在卡块18之间,从而固定第一连接板4;
两个第一安装板2下端均转动连接有第二安装板6,两个第二安装板6侧壁上均设有吸尘机构,吸尘机构包括吸尘盒5,吸尘盒5连接在第二安装板6的侧壁上,第二安装板6的侧壁上设有吸尘板7,吸尘板7内设有空腔,吸尘板7通过软管17和吸尘盒5相连,空腔与软管17相通,吸尘盒5的侧壁设有电机12,电机12输出轴连接有转动叶14,吸尘盒5内设有滤网16,吸尘盒5上设有输出通道15,输出通道15与吸尘盒5内相通,电机12启动,使得转动叶14转动,使得吸尘板7内产生吸力,吸取清扫后的杂物,通过软管17到达吸尘盒5内,被滤网16挡住,而空气或者水会通过输出通道15流出,方便持续吸取杂物,值得注意的是吸尘盒5的侧壁设有用于取出杂物的取出口(图中未示出,以图1的左边吸尘盒5为例,取出口是位于该吸尘盒5的滤网16左方),取出口处设置可以打开和关闭的盖板(图中未示出),便于在刮扫一段时间后取出吸尘盒5内的杂物;
第二安装板6上设有清扫机构,清扫机构包括第二转动杆27,第二转动杆27贯穿第二安装板6并通过轴承设置在第二安装板6上,第二转动杆27和电机12的输出轴上均设有传动轮,并且两个传动轮通过传动带13相连,第二安装板6上设有第三转动杆29,第三转动杆29通过轴承设置在第二安装板6的侧壁上,第三转动杆29上套设有转动辊28,转动辊28上套设有刷毛8,吸尘板7靠近刷毛8的侧壁设置有与空腔连通的吸尘口,如此,在刷毛8工作时,可以将部分刮扫的杂物扫至吸尘口内,进而经过空腔、软管17并进入吸尘盒5内;值得注意的是,吸尘口只能吸取部分杂物,而并非全部杂物。
第三转动杆29上端设有第一锥齿轮30,第二转动杆27远离传动轮的一端设有第二锥齿轮31,第二锥齿轮31与第一锥齿轮30相互啮合,第二安装板6上设有滑槽34,滑槽34内设有滑动板33,滑动板33为齿形板,可以更好的对刷毛8进行清理,滑动板33下端连接有第三弹簧35,第三弹簧35远离滑动板33的一端固定连接在滑槽34侧壁上,滑动板33上端固定连接有第一磁铁36,第二转动杆27上固定连接有第二磁铁32,第二磁铁32与第一磁铁36相互配合,使得电机12能带动第二转动杆27转动,即第二锥齿轮31转动,带动第一锥齿轮30转动,即转动辊28转动,刷毛8开始转动,对沟渠1侧壁进行清洁,同时转动辊28上的第二滚轮9能沿着沟渠1侧壁转动,实现整体装置的移动,另外,第一磁铁36上端为N极,第二磁铁32上端为N极,使得第二转动杆27转动时第二磁铁32能对滑动板33上的第一磁铁36间歇式的产生相斥力,实现滑动板33的上下抖动,由于工作时刷毛8水平方向转动,当转动至齿状的滑动板33处时,可以刮掉刷毛8上粘附的杂物,保证刷毛8的整洁。
本发明中,两个第二安装板6下端之间设有第三安装板38,第三安装板38内设有两个第三安装槽39,两个第三安装槽39内均设有移动杆37,移动杆37一端贯穿第三安装板38侧壁并转动连接在第二安装板6侧壁上,移动杆37另一端连接有第四弹簧40,第四弹簧40的另一端连接在第三安装槽39的侧壁上,使得该装置根据不同沟渠1侧壁角度进行调整的时候,移动杆37能够在第四弹簧40的作用下对第二安装板6产生抵力,使得第二安装板6能够在移动时候不会倾倒,保证整体装置的稳定性,且保证了第二滚轮9与沟渠1侧壁的摩擦力,使第二滚轮9能沿着沟渠1侧壁方向移动;
两个第二安装板6下端均连接有第四安装板10,第四安装板10下侧壁连接有多个第一滚轮11,保证整体装置能够更好的移动,同时装置具有很好的稳定性,不会前后倾倒,转动辊28上设有两个第二滚轮9,第二滚轮9与沟渠1侧壁相切,使得第二滚轮9能带动整体装置顺利移动。
本发明只示出了沟渠垂直角度侧壁的情形,未示出其他倾斜角度沟渠的情形,在使用时,先根据沟渠1侧壁的角度调整第二安装板6的角度,再按住作块23即可调整第一连接板4在第一安装槽3内的位置,将两个第一安装板2的位置确定,放开操作杆23限位块19即可在第一弹簧22的作用下弹出,卡在卡块18之间,实现固定第一连接板4,这时候开启电机12,电机12能带动第二转动杆27转动,即第二锥齿轮31转动,带动第一锥齿轮30转动,即转动辊28转动,刷毛8开始转动,对沟渠1侧壁进行清洁,同时转动辊28上的第二滚轮9能沿着沟渠1侧壁转动,实现整体装置的移动,同时电机12能带动转动叶14转动,使得吸尘板7内产生吸力,吸取清扫后的部分杂物,通过软管17到达吸尘盒5内,被滤网16挡住,而空气或者水会通过输出通道15流出,方便持续吸取杂物,电机12带动第二转动杆27转动,使得第二转动杆27上的第二磁铁32能对滑动板33上的第一磁铁36间歇式的产生相斥力,实现滑动板33的抖动,由于滑动板33为齿形板,能更好的对刷毛8进行清理,保证刷毛8的整洁。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种水利工程用输水沟沟壁刮扫机器人
- 一种水利工程输水沟沟壁刮扫机器人用刮扫装置