一种飞机姿态教学演示装置
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及航空类课程教学设备技术领域,具体涉及一种飞机姿态教学演示装置。
背景技术
在飞行力学、飞行原理、飞行控制系统等航空类课程教学中,为了提高教学效果,教员经常需要演示飞机姿态运动的运动参数或者运动过程,从而让学员对上述抽象的知识内容有较为直观的了解。
当前课堂上所采用的教学演示方式主要有两类,一类是采用三维动画的方式进行演示,其主要缺点是需要提前制作,演示内容无法根据课堂中的需要进行灵活调整,也无法让学员进行操作;另一类是手持式飞机模型,其主要缺点是其演示效果依赖于教员的演示技巧,且无法做到对运动过程的准确呈现。
因此本发明考虑设计一种飞机姿态教学演示装置,通过输入设备的操作来设置飞机参数并控制演示装置中飞机模型的姿态运动,同时能够把飞机的姿态信息发送到电脑中,结合虚拟环境对飞机姿态运动进行展示。
发明内容
有鉴于此,本发明提供一种飞机姿态教学演示装置,用以解决上述问题。
为解决上述技术问题,本发明提供一种飞机姿态教学演示装置,包括飞机模型、九轴组合传感器、三轴姿态平台以及控制模块,所述三轴姿态平台包括偏航驱动舵机以及设置在偏航驱动舵机上的偏航框架,所述偏航框架上设置俯仰驱动舵机和俯仰框架,所述俯仰框架水平旋转设置在偏航框架上,所述俯仰驱动舵机与俯仰框架传动连接,所述俯仰框架上设置滚转驱动舵机和滚转平台,所述滚转平台水平旋转设置在俯仰框架上,所述滚转驱动舵机与滚转平台传动连接,所述飞机模型和九轴组合传感器均设置在滚转平台上。
进一步的,所述控制模块包括控制器以及两组电池和降压模块,其中一组电池和降压模块与控制器连接,另一组与俯仰驱动舵机、滚转驱动舵机、偏航驱动舵机电连接,所述控制器与俯仰驱动舵机、滚转驱动舵机、偏航驱动舵机、九轴组合传感器通信连接,所述控制器与九轴组合传感器电连接。
进一步的,所述九轴组合传感器包括三轴加速度传感器、三轴角速度传感器、三轴地磁信息传感器。
进一步的,所述控制器与计算机连接,所述计算机上设置显示器和外设组件。
进一步的,所述控制器、电池、降压模块均设置在底板上,所述偏航驱动舵机设置在所述底板上。
进一步的,所述偏航框架为矩形框架,所述偏航框架底部与偏航驱动舵机输出轴固定连接。
进一步的,所述俯仰框架为矩形框架,所述俯仰驱动舵机设置在偏航框架的外侧,所述偏航框架上设置第一通孔,所述第一通孔内设置第一轴承,所述俯仰驱动舵机的输出轴穿过偏航框架上的第一轴承与俯仰框架的一侧连接,所述偏航框架另一侧的内侧设置第一轴承槽,所述第一轴承槽内设置第二轴承,所述第二轴承内设置第一转轴,所述第一转轴与俯仰框架的另一侧连接。
进一步的,所述滚转驱动舵机设置在所述俯仰框架的前侧,所述俯仰框架的前侧设置第二通孔,所述第二通孔内设置第三轴承,所述滚转驱动舵机的输出轴穿过所述第三轴承与滚转平台的前端连接。
进一步的,所述俯仰框架的后侧设置第二轴承槽,所述第二轴承槽内设置第四轴承,所述第四轴承内设置第二转轴,所述滚转平台的后端与第二转轴连接。
进一步的,所述偏航框架、俯仰框架和滚转平台均采用透明材料制件。
本发明的上述技术方案的有益效果如下:
飞机模型设置在三轴姿态平台上,三轴姿态平台通过三个舵机,实现三个轴向上的旋转,可以模拟出飞机在飞行过程中的姿态,九轴组合传感器可以实时监测飞机的三轴加速度、三轴角速度、三轴地磁信息并发送至控制模块,对飞机的飞行姿态信息进行反馈。三轴姿态平台包括飞机模型和九轴组合传感器安装在滚转平台上。滚转驱动舵机输出轴与滚转平台转轴相连并安装在俯仰框架上,俯仰驱动舵机与俯仰框架转轴相连并安装在偏航框架上,偏航驱动舵机与偏航框架相连并安装在底座上。通过三个舵机的控制,来调整飞机姿态。
本发明一方面让教员可以灵活操作演示装置中模型,向学员展示直观、准确的飞机姿态运动情况;另一方面可以让学员通过调整控制参数,观察不同参数设置对飞机运动的影响。
附图说明
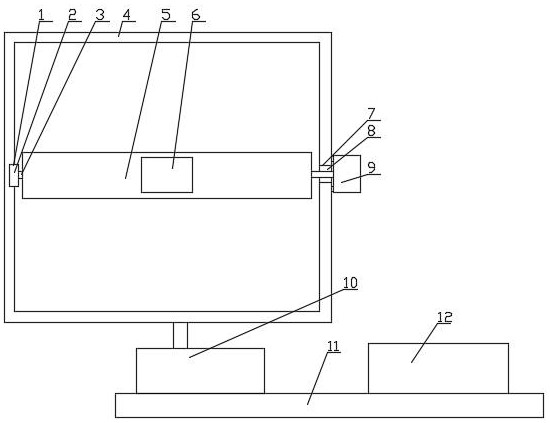
图1为本发明飞机姿态教学演示装置的结构示意图;
图2为本发明俯仰框架内的结构示意图;
图3为本发明控制系统的系统结构图。
1、第一轴承槽;2、第二轴承;3、第一转轴;4、偏航框架;5、俯仰框架;6、滚转驱动舵机;7、第一通孔;8、第一轴承;9、俯仰驱动舵机;10、偏航驱动舵机;11、底板;12、控制模块;13、滚转平台;14、第二轴承槽;15、第四轴承;16、第二转轴;17、飞机模型;18、九轴组合传感器;19、第二通孔;20、第三轴承;21、电池; 22、降压模块;23、控制器;24、计算机;25、显示器;26、外设组件。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图1-3,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
如图1-3所示:
本实施例提供了一种飞机姿态教学演示装置,包括飞机模型17、九轴组合传感器18、三轴姿态平台以及控制模块12,所述三轴姿态平台包括偏航驱动舵机10以及设置在偏航驱动舵机10上的偏航框架 4,所述偏航框架4上设置俯仰驱动舵机9和俯仰框架5,所述俯仰框架5水平旋转设置在偏航框架4上,所述俯仰驱动舵机9与俯仰框架5传动连接,所述俯仰框架5上设置滚转驱动舵机6和滚转平台 13,所述滚转平台13水平旋转设置在俯仰框架5上,所述滚转驱动舵机6与滚转平台13传动连接,所述飞机模型17和九轴组合传感器 18均设置在滚转平台13上。
所述控制模块12包括控制器23以及两组电池21和降压模块22,其中一组电池21和降压模块22与控制器23连接,另一组与俯仰驱动舵机9、滚转驱动舵机6、偏航驱动舵机10电连接,所述控制器 23与俯仰驱动舵机9、滚转驱动舵机6、偏航驱动舵机10、九轴组合传感器18通信连接,所述控制器23与九轴组合传感器18电连接。
所述九轴组合传感器18包括三轴加速度传感器、三轴角速度传感器、三轴地磁信息传感器。
所述控制器23与计算机24连接,所述计算机24上设置显示器 25和外设组件26。
具体而言,该过程可以通过计算机进行控制,如将某一飞机的飞行参数通过计算机输入,使得三轴姿态平台按照输入的参数对飞机飞行姿态进行控制,以此进行模拟,使得学员可以清楚的对飞机姿态进行认知。三个舵机的控制接口与控制器的PWM输出针脚相连,其供电接口与降压模块输出端相连。九轴组合传感器的通信接口与控制器的I2C接口相连,其供电接口与控制器的5V输出接口相连。降压模块的输入端与电池相连。控制器与计算机通过USB线缆相连。
滚转驱动舵机、俯仰驱动舵机、偏航驱动舵机受控制器发来的控制信号,带动三轴姿态平台各框架进行运动。九轴组合传感器实时测量飞机模型的三轴加速度、三轴角速度和三轴地磁信息,并发送给控制器进行结算。控制器接收计算机发来的控制指令,根据控制律解算出滚转驱动舵机、俯仰驱动舵机、偏航驱动舵机的控制信号,同时将九轴组合传感器实时测量的三轴加速度、三轴角速度和三轴地磁信息进行结算后发送给计算机进行显示。计算机通过键盘、鼠标、飞行摇杆等外设组件接收使用者的控制指令,并将控制指令发送给控制器,同时显示接收控制器发来的三轴加速度、三轴角速度和三轴地磁信息,并根据以上信息在三维视景环境中显示飞机的姿态运动。
根据本发明的一个实施例,如图1所示,
所述控制器23、电池21、降压模块22均设置在底板11上,所述偏航驱动舵机10设置在所述底板11上。这是将装置都安装在一个整体上的一种实施结构,底板可以固定或不固定,但需要注意重心调整,可以对底板增重,避免演示过程中设备歪斜。
在本发明的一个实施例中,如图1和图2所示,
所述偏航框架4为矩形框架,所述偏航框架4底部与偏航驱动舵机10输出轴固定连接。
所述俯仰框架5为矩形框架,所述俯仰驱动舵机9设置在偏航框架4的外侧,所述偏航框架4上设置第一通孔7,所述第一通孔7内设置第一轴承8,所述俯仰驱动舵机9的输出轴穿过偏航框架4上的第一轴承8与俯仰框架5的一侧连接,所述偏航框架4另一侧的内侧设置第一轴承槽1,所述第一轴承槽1内设置第二轴承2,所述第二轴承2内设置第一转轴3,所述第一转轴3与俯仰框架5的另一侧连接。
所述滚转驱动舵机6设置在所述俯仰框架5的前侧,所述俯仰框架5的前侧设置第二通孔19,所述第二通孔19内设置第三轴承20,所述滚转驱动舵机6的输出轴穿过所述第三轴承20与滚转平台13的前端连接。
所述俯仰框架5的后侧设置第二轴承槽14,所述第二轴承槽14 内设置第四轴承15,所述第四轴承15内设置第二转轴16,所述滚转平台13的后端与第二转轴16连接。
上述为三轴姿态平台的一种实施方式,偏航驱动舵机可以带动偏航框架在水平面内的旋转。俯仰驱动舵机在偏航框架的侧面,且设置在外侧,通过其输出轴连接俯仰框架,且俯仰框架另一侧与偏航框架通过轴承和转轴旋转连接,使得俯仰驱动舵机可以带动俯仰框架绕着其输出轴转动。另外滚转平台上设置飞机和传感器,滚转平台同样通过轴承和转轴旋转连接俯仰框架,且滚转驱动舵机设置在俯仰框架的前侧,通过其输出轴与滚转平台连接后,输出轴的转动可以带动滚转平台旋转。
在本发明的一个实施例中,如图1和图2所示,
所述偏航框架4、俯仰框架5和滚转平台13均采用透明材料制件。采用透明材料制件后可以更方便对滚转平台上的飞机模型进行观察,其材料可以选择塑料。
在本发明的一个实施例中,
该实施例提供了上述飞机模型静止姿态展示控制方法,其为控制器中俯仰驱动舵机、滚转驱动舵机和偏航驱动舵机的控制指令分别是θ、滚转角φ和偏航角ψ,计算机发来的用户输入的俯仰角、滚转角和偏航角等数值分别为θ
θ=θ
φ=φ
ψ=ψ
在本发明的一个实施例中,
该实施例提供了飞行摇杆姿态控制方法,该控制方法适用于采用摇杆控制的情况,具体方法(控制律)如下:
通过外设飞行摇杆控制模型飞机姿态,设δ
θ=K
所述K
φ=K
ψ=K
所述K
在本发明的一个实施例中,
该实施例提供了纵、横向典型模态演示控制方法,具体方法(控制律)如下:
所述纵向典型运动模态演示控制方法用于演示常规布局飞机在受到纵向瞬态扰动后表现出来的短周期运动和长周期运动中的俯仰角变化过程;
所述纵向短周期模态表现为在扰动消失后,飞机俯仰角快衰减振荡的过程,而最终的俯仰角将会稳定在初始俯仰角和扰动导致的最大俯仰角之间某一个值。为了近似模拟这种运动过程,控制器输出的俯仰驱动舵机的控制指令随时间变化的函数如下:
所述θ
所述纵向长周期运动模态表现为飞机的俯仰角变化过程近似于一个慢速衰减振荡过程,持续时间较长,为了近似模拟这种运动过程,控制器输出的俯仰驱动舵机的控制指令随时间变化的函数如下:
所述θ
所述横向典型运动模态演示控制方法用于演示常规布局飞机在受到横向扰动后表现出来的滚转模态、荷兰滚模态和螺旋模态中的姿态角变化过程;
所述滚转模态表现为飞机横向扰动消失后,滚转角的快速衰减振荡过程,其变化类似于俯仰角在纵向短周期运动中的变化过程,所不同的是滚转角最终将会回到初始平衡状态,也就是0的位置。为了近似模拟这种运动过程,控制器输出的滚转驱动舵机的控制指令随时间变化的函数如下:
所述K
所述荷兰滚模态表现为飞机横向和航向的交替耦合振荡,这种振荡具有相同频率,且航向的振荡之后滚转角
φ=K
所述K
所述螺旋模态表现为滚转、航向和俯仰方向的耦合,其特点是飞机的滚转角由0初始状态逐步变化到
θ=-tan
φ=tan
ψ=ω
所述ω
在本发明中,除非另有明确的规定和限定,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种飞机姿态教学演示装置
- 一种飞机飞行姿态演示装置