一种具有控制舵面的升力翼多旋翼飞行器
文献发布时间:2023-06-19 13:49:36
【技术领域】
本发明设计一种具有可以产生额外升力机翼的旋翼无人机,相对于常规多旋翼飞行器它具有更高续航能力,相对于已有的复合式无人机它没有单独的推进动力,也没有倾转机构,具有更强的抗风能力、更强的可靠性,适于远距离大风环境下执行任务的无人机,属于飞行器设计领域。
【背景技术】
无人机是一种较小的、无人驾驶的飞机,可以在空中自主飞行并执行某些任务。与普通飞机相比,无人机结构简单,成本低,易于制造和维护。根据结构的不同,无人机可分为固定翼无人机和旋翼无人机两类。比较这两类无人机,旋翼机具有非常突出的优势:体积小、质量小、机动简单、起降空间小不需要滑跑或弹射、在空中悬停系统起来非常灵活等。垂直起降的无人机在研究人员、业余爱好者和军队中非常受欢迎。四旋翼直升机是一种能够垂直起飞和降落的旋翼机,其旋翼由电动马达驱动。由于多旋翼的易用性、没有直升机复杂的机械结构的结构可靠性与可维护性,会使多旋翼在更多的方面表现更加出色,成为越来越多的消费者的选择。而固定翼又在续航能力上具有更加显著的优势,由于固定翼的机翼会具有更大的升阻比从而有更长的续航能力。将二者结合会有效的发挥固定翼的长续航与多旋翼的垂直起降能力。
【发明内容】
为有效结合四旋翼与固定翼各自的优点,本发明提供了一种稳定可靠并具有良好气动效率升力翼面与控制舵面的垂直起降飞行器。
为实现上述目的,本发明一种具有控制舵面的升力翼多旋翼飞行器,包括四组旋翼系统、能源与飞行控制系统、一对旋翼支杆、起落架、升力翼面;其中,升力翼面中间膨出一定空腔形成机身,翼面后缘有一对控制舵面,以上各部件的相互关系如下:升力翼面中间的机身开有三个舱盖,里面容纳电池、飞行控制系统、航拍相机等载荷;一对旋翼支杆贯穿于左右两侧翼面的中间,旋翼支杆和四个螺旋桨组成的平面与翼面平面呈小于90°特定固定的角度,四组倾转旋翼系统分别安装在旋翼杆的顶端,前面一对起落架固定于旋翼支杆,机身尾部作为后部起落架。
所述每组倾转旋翼系统由一个直流无刷电机、一个螺旋桨构成。它们之间的相互关系如下:螺旋桨安装在直流无刷电机上,直流无刷电机固定在旋翼杆上。
所述能源与飞行控制系统由电池、电流计、pixhawk开源飞控板构成,用于控制直流无刷电机、舵面偏角,进而控制旋翼飞行器飞行姿态。
所述旋翼杆为空心碳纤维杆,用于连接升力翼面与旋翼系统,具有水滴形截面形状来减少阻力。
所述起落架为三点式支撑结构,前面两个起落架支撑结构连接于旋翼支杆上,机身尾部作为后部的起落架结构。
所述升力翼面是翼身融合构型,中间的机身与翼面融为一体,翼身融合体外形可以显著减少机翼机身之间的干扰阻力。经过数值优化设计后的机翼外形具有最优的机翼面积、展弦比、跟梢比和扭转角,具有高的升阻比。在巡航状态下机体前倾,使得升力翼面进入巡航迎角发挥高气动效率,给机体提供除螺旋桨以外的升力。外侧翼面的后缘放置有控制舵面来进行姿态辅助控制可以实现冗余控制,在动力螺旋桨失效的情况下依然可以进行姿态控制。
所述机身由中间的内部的隔框与甲板以及外部的外壳与口盖构成。它们之间的相互关系如下:内部甲板平行于翼面,上平面放置电池,下平面仿真飞行控制系统以及摄像头等部件,隔框垂直于甲板与翼面,外壳与翼面融为一体,上面开有一个口盖,下面开有两个口盖,方便设备取放。
本发明优点及功效在于:由于翼身融合构型的升力翼面具有更小的浸润面积减小了飞机的阻力,以及升力翼面带来的附加升力,使得飞机具有更高的升阻比。舍弃尾翼减小了阻力和结构重量。这样相较于传统的多旋翼具有更好的续航能力,升力翼多旋翼的机翼具有较小的参考面积和翼展,提高了在大风条件下的稳定性。没有复杂的倾转机构即可实现前飞与悬停的转换,具有良好的可靠与稳定性。控制舵面进行辅助控制可以提高飞机抗扰动能力,提高飞行效率和稳定性。
【附图说明】
图1为等轴测结构示意图。
图2为正视结构示意图。
图3为俯视结构示意图。
图4为斜置电机方案的侧视结构示意图。
图5为升力翼面的外形尺寸。
图中标号说明如下:
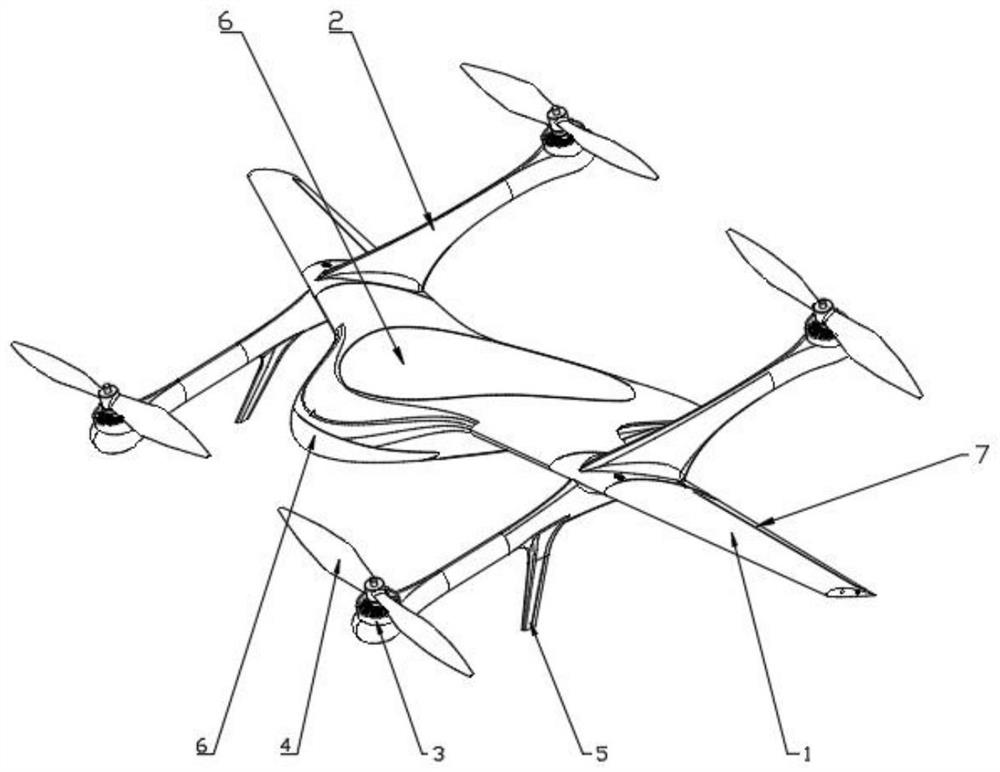
1、升力翼面; 2、旋翼支杆; 3、电机; 4、螺旋桨;
5、起落架; 6、舱盖; 7、控制舵面; 8、地面;
【具体实施方式】
本发明是一种具有控制舵面的升力翼多旋翼飞行器,为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图,对本发明进行进一步的详细说明。
图1为本发明实施中多自由度倾桨四旋翼无人机结构示意图。包括四组旋翼系统,能源与飞行控制系统、一对旋翼支杆、起落架、升力翼面,其中升力翼面中间膨出行程一定空腔形成机身,翼面后缘有一对控制舵面,以上各部件的相互关系如下:升力翼面中间的机身开有三个舱盖,里面容纳电池,飞行控制系统、航拍相机等载荷,一对旋翼支杆贯穿于左右两侧翼面的中间,与翼面平面呈特定的角度,四组倾转旋翼系统分别安装在旋翼杆的顶端,前面一对起落架固定于旋翼支杆,机身尾部作为后部起落架。该飞行控制器选用Pixhawk开源飞控板,使用飞控板4个PWM输出控制四个电机,2个PWM输出控制两个控制舵面舵机。
升力翼面、旋翼支杆与起落架之间的关系如图2所示,旋翼支杆2与升力翼面1呈固定角度,前部起落架5固定于旋翼支杆前侧,机身尾部(图2中右侧标号5)作为后起落架。升力翼面的外形尺寸如图5所示。
所述控制舵面如图3飞行器俯视图所示,控制舵面7分别放置于左右外侧翼面后缘,控制舵面伺服作动器放置于主翼面内部,控制舵面可以同向偏转作为升降舵,可以差向偏转作为副翼。四个直流无刷电机通过螺栓固定于旋翼支杆顶端,电源线从旋翼支杆中穿过连到机身内的电子调速器上,电子调速器接收飞控传来的PWM信号实现电机转速的控制。
按照上述过程将飞行器安装完成,将电源接通后,通过增大直流无刷电机的转速,使得飞行器可以起飞;在空中时,当升力大于重力时,飞行器垂直上升,当升力与重力相同时,飞行器可以悬停到空中。通过控制飞机的俯仰姿态使得翼面迎角达到巡航迎角后及实现了高速高效巡航前飞,飞行过程中使用控制舵面实现姿态的增稳,可以有效提高飞机的抗风稳定性和飞行效率。当飞行任务结束后,恢复四个螺旋桨方向垂直向上,缓慢减小直流无刷电机的转速,升力逐渐变小,最终飞行器降落。
在悬停状态下机翼不产生升力,由螺旋桨提供全部升力,转速约为5000转/分,消耗功率约为230W,悬停时间约为20分钟。在进入巡航状态后,巡航速度为20m/s,升力翼面升力系数为0.51,此时升力翼面产生升力约为20N,将承担飞行器绝大部分升力,这将大大减少动力系统的功率,续航时间提升为35分钟,最大航程为42km。