一种装甲移动靶车
文献发布时间:2024-01-17 01:13:28
技术领域
本发明涉及装甲射击训练设备技术领域,特别是涉及一种装甲移动靶车。
背景技术
射击打靶是军事方面的常规训练方式,装甲打靶用的靶子分为固定位置式和移动位置式。现有针对装甲射击训练一般都采用后者,即移动位置式,方便模拟实际情况,例如模拟敌方前沿防御分队阵前出击和预备队逆袭行动。
由于装甲移动范围大,对应移动靶所要移动的距离也较大——一般都是百米起。移动靶所处的路径需要预先铺设,而基于成本等原因,现有基于丝杆等设计的移动台等路径结构并不适合这种长距离的情况。因此,发明人在先设计了一种小车式移动靶,在小车四角设置了4个车轮,并架在铺设的轨道上移动。处于成本、重量、装配等考虑,轨道采用了圆管组成双轨,圆管的规格具有多种,采用40cm~70cm均可,优选采用60cm。轨道采用节节拼接的方式,实现长度超过百米。这样,小车压在轨道上,通过车轮与双轨滚动接触,即可沿着轨道移动,快捷方便。
但使用时发现,若是强风天气,由于小车还要立起靶子,靶子易受到风力作用而使小车被吹的从轨道上脱离。并且现有移动靶车的靶子大多是预先树立好的,不能调整,占用的纵向空间也大。
发明内容
基于此,有必要针对现有小车式移动靶易被风力作用而与轨道脱离、靶子不能调整的问题,提供一种装甲移动靶车。
本发明采用以下技术方案实现:
本发明公开了一种装甲移动靶车,设置在轨道上。轨道包括间隔设置的圆管,圆管的相对面通过支架一连接,支架一将圆管架起并悬空。
装甲移动靶车包括车架、驱动机构、起倒架、伸缩调节件、报靶器。车架的四角向下分别设置有一个车轮,用于与圆管的顶端滚动接触。车架的四角还分别通过轮架一设置有一组侧滚轮、通过轮架二设置有一组下滚轮。下滚轮位于圆管下方、并与圆管的底端滚动接触。侧滚轮位于圆管的相互背离的一侧、并与圆管的侧面滚动接触。驱动机构设置在车架内,用于驱动车轮转动以使车架沿着轨道移动。驱动机构还设置有制动器,用于对车轮进行制动。起倒架可拆卸连接有靶板。起倒架的前端与车架的前端铰接。伸缩调节件设置在起倒架和车架之间。伸缩调节件一端与车架铰接,另一端与起倒架铰接。伸缩调节件伸长时,起倒架随即远离车架顶部而立起。伸缩调节件缩短时,起倒架随即靠近车架顶部而倒下。报靶器设置在车架上,用于对靶板弹着点的位置进行检测及播报。
该种装甲移动靶车的实现根据本公开的实施例的方法或过程。
与现有技术相比,本发明具备如下有益效果:
1,本发明基于小车设计装甲移动靶车,增设了位于圆管轨道下方的下滚轮和位于圆管轨道侧面的侧滚轮,实现对轨道的多点接触,增强装甲移动靶车与轨道的连接稳定性。本发明还设置了伸缩调节件将起倒架将车架连接,通过伸缩调节件的伸缩带动起倒架进行转动,从而实现角度的调整,并进而完成立起或倒下,灵活性高。
2,本发明还通过对轮架一进行特别结构设计,利用调节杆一带动安装架一及其上的侧滚轮进行偏转;对轮架二进行特别结构设计,利用调节杆一带动安装架二及其上的下滚轮进行移动;从而调整侧滚轮、下滚轮与车轮的距离,可适应不同规格的圆管轨道。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例1的装甲移动靶车装在轨道上的结构图;
图2为图1中隐藏部分轨道后的结构图;
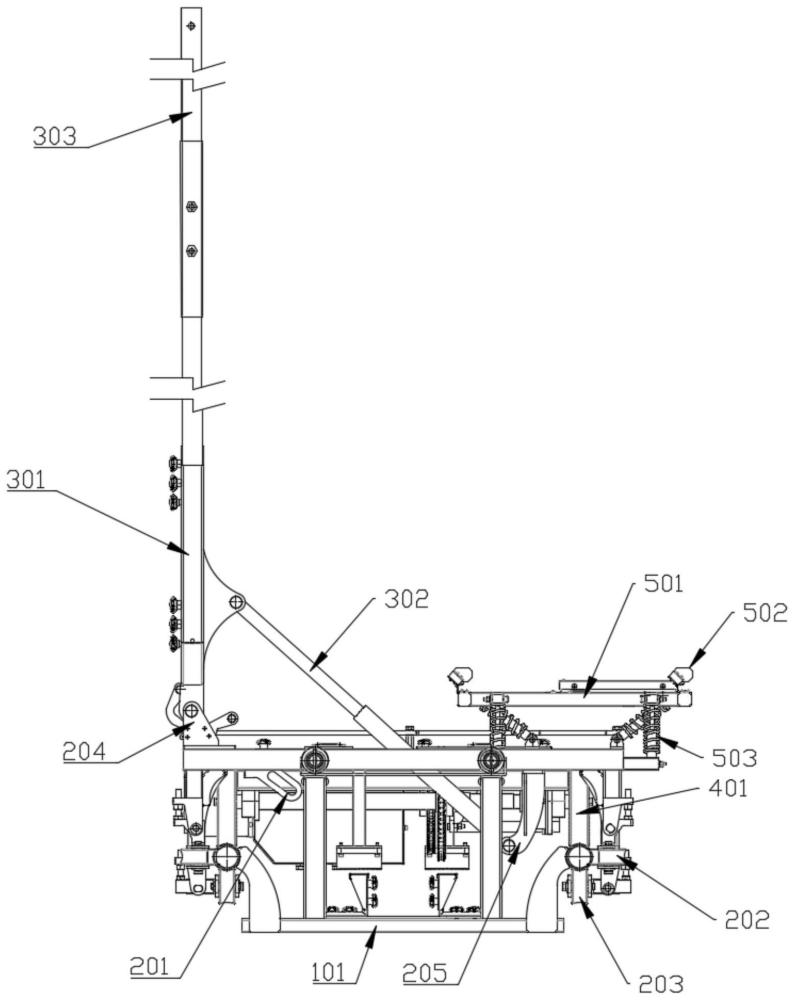
图3为图2中装甲移动靶车的侧视图;
图4为图2中装甲移动靶车的放大图;
图5为图4中的侧滚轮的放大图;
图6为图4中的下滚轮的放大图;
图7为图2中装甲移动靶车的一个角度的仰视图;
图8为图2中装甲移动靶车的另一个角度的仰视图;
图9为图1中轨道的结构图;
图10为图9中轨道尾端的结构图;
附图中,各标号所代表的部件列表如下:
1、轨道,101、支架一,102、圆管,103、支架二,104、缓冲件一,105、扩径板,106、支架三,
2、车架,201、铰接座三,202、侧滚轮,203、下滚轮,204、铰接座一,205、铰接座二,206、电池仓,2021、调节杆一,2022、连接架一,2023、安装架一,2024、转动轮一,2025、连接柱一,2031、调节杆二,2032、连接架二,2033、安装架二,2034、转动轮二,2035、连接柱二,
3、起倒架,301、框架一,302、液压杆,303、拓展杆,
4、驱动机构,401、车轮,402、从动轴,403、主动链轮,404、从动链轮,405、驱动电机,406、制动器,407、张紧轮,
5、报靶器,501、框架二,502、激波传感器,503、缓冲件二。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,当组件被称为“安装于”另一个组件,它可以直接在另一个组件上,也可以存在居中的组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上,亦或同时存在居中组件。当一个组件被认为是“固定于”另一个组件,它可以是直接固定在另一个组件上,亦或同时存在居中组件。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“或/及”包括一个或多个相关的所列项目的任意的和所有的组合。
实施例1
参看图1,本实施例公开了一种装甲移动靶车,其设置在轨道1上。
如图2所示,本实施例的轨道1为特别设计,考虑到成本、重量、装配等因素,轨道1采用间隔设置的圆管102,构成双轨。圆管102的相对面通过支架一101连接,支架一101将圆管102架起并悬空,这样圆管102露出至少四分之三的无阻碍面。支架一101建议膨胀螺栓安装在地面上。
参看图3,为装甲移动靶车的侧视图。装甲移动靶车包括车架2、驱动机构4、起倒架3、伸缩调节件、报靶器5。
车架2的四角向下分别装有一个车轮401,用于与圆管102的顶端滚动接触。车架2的四角还分别通过轮架一设置有一组侧滚轮202、通过轮架二设置有一组下滚轮203。
参看图4,车架2的四角都设置了一个车轮401、一组侧滚轮202、一组下滚轮203。下滚轮203位于圆管102下方、并与圆管102的底端滚动接触。侧滚轮202位于圆管102的相互背离的一侧、并与圆管102的侧面滚动接触。这样使车架2与轨道1进行多点接触,其中侧滚轮202、下滚轮203对车架2进行了限制,起到类似于倒勾的作用,使车架2近似于钩住圆管102,从而增强车架2与轨道1的连接牢靠性。这样,即使靶板立起并受到风力作用,车架2也可避免与轨道1脱离。
当然,由于轨道1采用圆管102直径具有多种规格,也就是双轨虽然间距可相同,但管径会不同。因此,侧滚轮202、下滚轮203建议设计可调节式。
参看图5,对于侧滚轮202,对轮架一进行特殊设计:
轮架一包括:连接架一2022、调节杆一2021、连接柱一2025、安装架一2023。连接架一2022为“7”字形,其弯折端与车架2连接,一般采用焊接。调节杆一2021设置有螺纹。调节杆一2021贯穿连接架一2022顶部远离弯折端的一端,并留有活动余度。调节杆一2021通过上下侧的螺母与连接架一2022进行固定。具体的,如图5所示,连接架一2022顶部远离弯折端的一端开有通槽一,调节杆一2021穿过通槽一。通槽一使调节杆一2021在螺母放松时可进行移动,在螺母锁紧后进行固定。连接柱一2025也为“7”字形,其弯折端与连接架一2022的底端铰接,顶部远离弯折端的一端与调节杆一2021的底端铰接。安装架一2023连接在连接柱一2025底端。安装架一2023装有转动轮一2024,转动轮一2024作为侧滚轮202。
这样,将调节杆一2021上下侧螺母拧松,使调节杆一2021移动,即会使连接柱一2025带动安装架一2023进行偏转,从而使转动轮一2024跟着偏移,改变与车轮401的间距,适应于不同管径的轨道1。在对转动轮一2024完成调整后,进上下侧螺母拧紧,使调节杆一2021固定,也对转动轮一2024实现定位。
与侧滚轮202类似的,参看图6,对于下滚轮203,对轮架二进行特殊设计:
轮架二包括:连接架二2032、调节杆二2031、连接柱二2035、安装架二2033。连接架二2032为“7”字形,其弯折端与车架2连接,一般采用焊接。调节杆二2031设置有螺纹、并贯穿连接架二2032。调节杆二2031通过上下侧的螺母与连接架二2032进行固定。
连接柱二2035为一字形,其外端与调节杆二2031底端连接,需要注意的是,与侧滚轮202不同,该处一般采用固定连接。安装架二2033连接在连接柱二2035内端。安装架二2033装有转动轮二2034,转动轮二2034作为下滚轮203。一般的,还会在连接架二2032底端加工有一字形的通槽二,连接柱二2035侧向连接接限位杆,限位杆穿过通槽二。这样,将调节杆二2031上下侧螺母拧松,使调节杆二2031升降,即使连接柱二2035带动安装架一2023进行升降,从而使转动轮一2024跟着升降,改变与车轮401的间距,适应于不同管径的轨道1。在对转动轮二2034完成调整后,进上下侧螺母拧紧,使调节杆二2031固定,也对转动轮二2034实现定位。
此外,建议将限位杆加工有螺纹,并通过螺母将限位杆与连接架二2032进行固定,从而增强连接柱与连接架二2032的连接牢靠性。
通过对轮架一、轮架二的特殊设计,使侧滚轮202、下滚轮203的方位可调,即方便进行与轨道1进行安装拆卸,又可适应于不同管径规格的轨道1。
参看图7、图8,从两个不同角度展示了驱动机构4的结构。驱动机构4设置在车架2内,用于驱动车轮401转动以使车架2沿着轨道1移动。驱动机构4还设置有制动器406,用于对车轮401进行制动。
具体的,驱动机构4包括从动轴402、从动链轮404、驱动电机405、制动器406。
从动轴402设置了两根,其中一根从动轴402连接位于车架2一侧的两个车轮401,另一根从动轴402连接位于车架2另一侧的两个车轮401。从动链轮404设置了两个,一对一设置在从动轴402上。驱动电机405固定在车架2上。驱动电机405的输出端同轴连接有两个主动链轮403,主动链轮403与从动链轮404一一对应,并通过链条传动连接:其中一个主动链轮403与其中一个从动链轮404套上链条,另一个主动链轮403与另一个从动链轮404套上链条。这样,驱动电机405驱动两个主动链轮403转动,通过链条使从动链轮404转动,进而带动车轮401转动,即可使车架2沿着轨道1移动。控制驱动电机405正转或反转,即可控制车架2在轨道1上的移动方向。驱动电机405采用布拉德智能矢量直流电机马达驱动器,可通过上位机(PLC或单片机等)进行PWM调速。当然,也可手动设定调速。
当然,从动轴402上还装有制动器406,一般采用电磁离合器,上电即制动,断电即释放。这样通过控制离合实现对车轮401转停的控制,实现制动。
此外,驱动机构4还包括有设置在轮架三上的张紧轮407,用于将链条张紧以保证传动的稳定。参看图8,张紧轮407与链条对应,设置了两个。轮架三的一端与车架2铰接,并通过螺母进行固定。张紧轮407装在轮架三的另一端。具体的,调整轮架三的偏转角度,使张紧轮407将链条张紧,之后采用螺母将轮架三的铰接端固定即可。
起倒架3连接有靶板(未画出)。参看图3、图4,起倒架3采用框架设计,为框架一301。框架一301立起时,其顶部两端设置有安装杆。靶板两端可对应设置有套筒,安装杆穿过套筒即完成了靶板与起倒架3的安装,快捷方便。若靶板高度较高,也可以在安装杆上延长安装拓展杆303,使拓展杆303穿过套筒。靶板可以是硬质的板件,也可以是软质的印刷件。
车架2的前端设置有铰接座一204,框架一301的前端与铰接座一204铰接。伸缩调节件设置在起倒架3和车架2之间:伸缩调节件一端与车架2铰接,另一端与起倒架3可拆卸铰接。具体的,车架2的后部设置有铰接座二205,起倒架3面向车架2的一面也对应设置有铰接端。伸缩调节件一端与铰接座二205铰接,另一端与铰接端可拆卸铰接。伸缩调节件可采用电动推杆、液压杆302等可控伸缩件。这样,当伸缩调节件伸长时,起倒架3随即远离车架2顶部而立起。当伸缩调节件缩短时,起倒架3随即靠近车架2顶部而倒下。为了保证起倒架3调整的效果,可采用两个伸缩调节件,对称设置,同步工作。
此外,考虑到零件运输方便等原因,车架2与起倒架3采用拆卸式设计,即起倒架3与车架2的铰接处可拆卸,伸缩调节件与起倒架3的铰接处可拆卸。但这样会使伸缩调节件不能定位,因此,在车架2的前部还设置了铰接座三201,便于将伸缩调节件一端与其铰接,从而可在单独对车架2运输时避免伸缩调节件发生碰撞。
报靶器5设置在车架2上,用于对靶板弹着点的位置进行检测及播报。参看图3,报靶器5采用超声波靶标,也采用框架设计。报靶器5包括框架二501、若干个激波传感器502、计算单元、播报单元。框架二501通过缓冲件二503连接在车架2顶部。一般的,缓冲件二503可采用弹簧减震器或钢丝绳减震器。框架二501上分散设置了若干个激波传感器502,用于对弹着点产生激波感应:激波传感器502记录接收到激波的时间,由于分布的位置不同,之间会存在时间差。计算单元用于依据激波传感器502的检测数据计算得到弹着点的位置,该计算方式为现有成熟技术,此处不再赘述。播报单元,用于对弹着点的位置进行播报,便于判定打靶者射击结果。
简单说明一下本装甲移动靶车的使用方式:
将装甲移动靶车装到轨道1上,并在起倒架3预装上靶板;控制驱动机构4使装甲移动靶车在轨道1上移动或驻停,控制伸缩调节件调整起倒架3的抬起角度。打靶者控制装甲对靶板进行射击,报靶器5对射击结果进行播报。
此外,由于运输、生产等原因,参看图9,轨道1采用多节圆管102拼接而成。轨道1可包括中段的运行段、两端的制动段、及位于运行段和制动段的减速段。
其中,减速段主要是用于在装甲移动靶车从运行段向制动段运行时,提前进行减速,避免进入制动段的速度过大而使制动效果不佳。
可以选择在减速段装上感应器,例如在减速段间隔设置几个光电传感器,若靠近运行段的光电传感器先检测到装甲移动靶车、靠近制动段的光电传感器后检测到装甲移动靶车,即说明装甲移动靶车是从运行段向制动段运行的,可以进行预先减速:控制驱动机构4控制对车架2进行减速,必要时进行制动。
也可以选择在减速段装上感应板,例如在减速段的支架一101装上支架三103,作为感应板的安装架,在减速段间隔设置几个黑色板,且越靠近制动段黑色板间距越小、越靠近运行段黑色板间距越大;再在装甲移动靶车上配套安装对应的感应器,例如红外传感器。装甲移动靶车在经过黑色板时,红外传感器则接收不到反射的红外信号,其他位置则可以接收到反射的红外信号。因此,若红外传感器接收不到红外信号的时间间隔逐渐变小,则说明装甲移动靶车是从运行段向制动段运行的,可以进行预先减速,必要时进行制动。当然,若越靠近制动段黑色板间距越大、越靠近运行段黑色板间距越小,则红外传感器接收不到红外信号的时间间隔逐渐变大时,说明装甲移动靶车是从运行段向制动段运行的,可以进行预先减速,必要时进行制动。
其中,制动段外侧设置有扩径板105,扩径板105越靠近制动段尾端、隆起程度越大,使制动段的轨距渐开,这样车架2在制动段上向轨道1端部移动时,侧滚轮202会接触扩径板105,所受的阻力会逐渐增大,从而辅助进行制动。
当然,参看图10,还可在轨道1端部通过支架二103连接缓冲件一104,缓冲件一104一般采用弹性件,例如弹簧杆等,利用其弹性形变对车架2进行缓冲,避免车架2硬性碰撞。
此外,装甲移动靶车还具有往复移动的模式,该模式下,装甲移动靶车从轨道的一端移动到另一端,再从另一端反相移动回去。可以在制动段安装接近开关,当装甲移动靶车移动至接近开关处,驱动电机405随即改变转向,从而改变装甲移动靶车移动方向。
考虑到轨道1长度会超过百米,本实施例1中的电气元件不宜使用外接电源的方式,因此,在车架2设置有电池仓206,用于存储给驱动电机405、制动器406等电气元件进行供电的蓄电池。一般蓄电池采用磷酸铁锂电池,提供更高的驱动电流和续航时间,并且重量也较轻。
实施例2
在实施例1的基础上,本实施例2增加了对装甲移动靶车的电气控制。装甲移动靶车还包括控制部。
控制部包括数据采集单元、移动控制单元、起倒控制单元、报靶控制单元。数据采集单元用于采集装甲移动靶车的状态参数:例如,装甲移动靶车的位置(在运行段布设位置传感器,在减速段布设感应器、或在减速段和装甲移动靶车布设配套的感应板和感应器)、移动速度(通过布设速度传感器实现)、起倒架3抬起角度(通过布设角度传感器实现)、接收到激波的时间(通过布设激波传感器502实现)等。移动控制单元用于控制装甲移动靶车在轨道1的移动或驻停。起倒控制单元用于控制起倒架3的起倒。报靶控制单元用于控制对射击结果进行报靶。其中,数据采集单元与移动控制单元、起倒控制单元、报靶控制单元采用RS232协议通信连接。
控制部通过USART与4G/5G专网电台进行信号传输。使用者在4G/5G专网电台端接收数据采集单元的数据,并从4G/5G专网电台对控制部发送相应的控制信号。例如,要实现起倒架3抬起至设定角度:采集起倒架3实时抬起角度,控制部发送控制信号给起倒控制单元,使伸缩调节件进行伸缩,直至实时抬起角度达到设定角度。又如,要实现装甲移动靶车在减速段自动减速:获取感应器的信号,控制部进行判断,若满足装甲移动靶车从运行段向制动段运行、且已进入减速段的情况,控制部发送控制信号给起移动控制单元,使驱动机构4对车架2进行减速,必要时也可以直接制动。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。