一种多域靶标系统及其控制方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明属于靶标技术领域,更具体地说,是涉及一种多域靶标系统,本发明还涉及一种多域靶标系统的控制方法。
背景技术
海上水面舰船面临的威胁主要来自于空中、水面和水下,为提高官兵实战能力,需开展一系列武器项目训练。鉴于当前技术可行性、训练安全性、经费成本等因素,主要将高速水面移动目标、低速水面移动目标、低空飞行目标等典型目标图像,围绕轻武器、舰炮、反舰导弹、直升机等武器开展训练项目。制定低空飞行目标的打靶项目时,尚无稳定、成熟的方式开展。急需某种方式模拟低空飞行的直升机,作为空中移动靶标,填补相关训练空白。制定反舰导弹性能考核项目时,主要采取基于临近退役的舰船加装/改装的方式,开展远程射击考核任务。该方式优点是真实模拟敌方舰船的轮廓外形、航速航向等特征,缺点是试验保障周期长,成本高,仅限于一次性使用,无法重复使用。制定水面舰船的近区防卫武器的射击考核项目时,主要采取在有人舰船的开阔主甲板上放置固定靶标的方式,或者简易的漂浮靶标的方式,开展训练。若采用有人舰船的开阔主甲板上放置固定靶标的方式,则该方式的优点是设备布置简单,缺点是射击过程威胁到被射击船的生命安全,无法真实模拟敌军高速快艇的航速。若采用简易的漂浮靶标的方式,该方式优点是成本低,保障周期短,缺点是无法模拟舰船的航速,缺乏真实性。制定水下鱼雷性能考核项目时,主要采取基于退役的舰船或者破旧小渔船,开展水下考核任务。该方式优点是真实模拟敌方舰船的水下轮廓外形、航速航向、磁性等特征,缺点是成本高,仅限于一次性使用,无法重复使用。总之,目前的靶标模拟特性单一,无法真实复现敌方重要特性,布置安装靶标无成套体系,试验准备、试验保障过程不具有完整复制性,不具有广泛适用性。
现有技术中有名称为“一种智能靶标系统及其受攻击状态的判定方法”、公开号为“112197648A”的技术,该技术包括传感器单元、数据处理单元、通信单元和显示单元,传感器单元采集靶标系统的状态信息,并发送至数据处理单元,数据处理单元分析智能靶标系统的受攻击状态,并将分析结果数据发送至通信单元,通信单元将分析结果数据发送至外部,接收外部的反馈信息并发送至数据处理单元,数据处理单元向显示单元发送指令,显示单元显示智能靶标系统的状态。
然而,该技术没有涉及本申请的技术问题和技术方案。
发明内容
本发明所要解决的技术问题是:提供一种步骤简单,能够方便可靠实现无人释放、无人回收靶标,减少人员海上准备时间,运行的靶标系统可模拟低空移动目标、可模拟水面低速目标、可模拟海面高速移动目标、可充当鱼雷靶标,从而实现一套系统同时满足轻武器、舰炮、反舰导弹、直升机等打靶训练任务的多域靶标系统的控制方法。
要解决以上所述的技术问题,本发明采取的技术方案为:
本发明为一种多域靶标系统的控制方法,所述的多域靶标系统的控制方法的控制步骤为:
S1.检靶系统的检靶系统传感器安装于靶船的驾驶室顶部,除天线外,检靶装置传感器位于全船最高处,检靶装置传感器直接收集导弹来袭方向、水柱高度参数,检靶系统的计算处理模块布置于驾驶室内,将收集的传感器参数实时计算,转化为弹道结论,为地面控制站和训练基地评价训练效果提供评判依据;
S2.所述的多域靶标系统的控制方法的控制模式启动前,靶标处于装载状态时,靶标处于释放状态时,承载框处于水平状态,与靶船的主甲板处于平行状态,牵引电机处于收紧状态;靶标位于承载框内,每个靶标与对应的牵引钩勾连,靶标状态固定;
S3.所述的多域靶标系统的控制方法的控制模式启动后,靶标处于释放状态时,承载框处于倾斜状态,与靶船的主甲板处于夹角状态,牵引电机处于松开状态;靶标与对应的牵引钩脱离,靶标离开承载框内,靶标处于释放状态;
S4.所述的多域靶标系统的控制方法的控制模式包括空中单靶模式、空中双靶模式、水面单靶模式、水面双靶模式、轻武器单打靶模式、轻武器双打靶模式。
所述的多域靶标系统处于空中单靶模式时:
任务执行前,输入靶船航行路径和速度、时间参数,对靶船进行任务规划;需要进入空中单靶模式时,释放固定在承载框内的靶标,牵引电机控制牵引绳缓慢释放,承载框缓慢倾斜,倾斜至一定角度后停止,牵引绳继续释放,靶标的配重舱内装满氦气,能够克服自重,控制靶标漂浮在空中,继续释放牵引绳,同时靶船继续航行,牵引绳释放至距离满足要求时,停止释放,牵引电机固定;
靶船的航速控制了靶标的飞行速度,用来模拟低速空中目标;训练舰船航渡状态下,要求舰员对靶标进行高射炮、舰炮射击,模拟舰船武器攻击低空低速目标的场景;靶标被击中后,会产生大片荧光分,从而肉眼判断是否击中靶标。
所述的多域靶标系统处于空中双靶模式时:
任务执行前,输入靶船航行路径和速度、时间参数,对靶船进行任务规划;需要进入空中双靶模式时,先释放一个靶标,再释放另一个靶标,两个靶标释放步骤相同,但第二靶标距离靶船的距离小于第一个靶标距离靶船的距离,保证两个靶标不会相互缠绕;
靶船的航速控制了靶标的飞行速度,用来模拟低速空中目标;训练舰船航渡状态下,要求舰员对靶标进行高射炮、舰炮射击,模拟舰船武器攻击低空低速目标的场景;靶标被击中后,会产生大片荧光分,从而肉眼判断是否击中靶标。
所述的多域靶标系统处于水面单靶模式时:
任务执行前,输入靶船航行路径和速度、时间参数;需要进入水面单靶模式时,释放固定在承载框内的靶标,牵引电机控制牵引绳缓慢释放,承载框缓慢倾斜,倾斜至一定角度后停止,牵引绳继续释放,靶标的配重舱内装满海水/淡水,靶标无法漂浮在空中,滑落至海水中,继续释放牵引绳,同时靶船继续航行,牵引绳释放至距离满足要求时,停止释放,牵引电机固定;
靶船的航速控制靶标的航行速度,模拟高速航行的小型快艇;训练舰船航渡状态下,要求舰员对靶标进行导弹射击,模拟两艘舰船远距离对抗、使用反舰导弹的场景;靶标被反舰导弹击中后,会产生巨大的浪花,从而判断是否击中靶标;
训练舰船航渡状态下,要求直升机远距离对靶标进行识别、定位、火箭弹/导弹射击,模拟直升机攻击小型舰船的场景;靶标被反舰导弹击中后,会产生巨大的浪花,从而判断是否击中靶标。
所述的多域靶标系统处于水面双靶模式时:
任务执行前,输入靶船航行路径和速度、时间参数;需要进入水面双靶模式时,先释放一个靶标,再释放另一个靶标,两个靶标释放步骤相同,但第二个靶标距离靶船的距离小于第一个靶标距离靶船的距离,保证两个靶标不会相互缠绕;靶船的航速控制多功能靶标的速度,模拟高速航行的小型快艇;
训练舰船航渡状态下,要求舰员对靶标进行导弹射击,模拟三艘舰船远距离对抗、使用反舰导弹的场景;靶标被反舰导弹击中后,会产生巨大的浪花,从而判断是否击中靶标。
训练舰船航渡状态下,要求直升机远距离对靶标进行识别、定位、火箭弹/导弹设计,模拟直升机攻击小型舰船的场景;多功能靶标被反舰导弹击中后,会产生巨大的浪花,从而判断是否击中靶标。
所述的多域靶标系统处于轻武器打靶模式时:
任务执行前,输入靶船航行路径和速度、时间参数;轻武器打靶模式下,多功能靶标被固定在承载框内;训练舰船航渡状态下,要求舰员进行轻武器射击,射击靶标,模拟两艘舰船近距离轻武器对抗的场景;靶标被轻武器击中后,荧光粉则被冲击散开,夜晚状态下,红外夜视仪能够清晰观察到是否有荧光粉,从而判断是否击中靶标。
本发明还涉及一种步骤简单,能够方便可靠实现无人释放、无人回收靶标,减少人员海上准备时间,运行的靶标系统可模拟低空移动目标、可模拟水面低速目标、可模拟海面高速移动目标、可充当鱼雷靶标,从而实现一套系统同时满足轻武器、舰炮、反舰导弹、直升机等打靶训练任务的多域靶标系统,包括靶标、靶船,靶船上安装牵引电机,牵引电机连接牵引绳,牵引绳连接靶标,靶船上同时设置基座,基座活动连接转接头,转接头固定连接承载框,靶船上设置检靶系统传感器、图传数传天线,靶标上设置推进装置、配重舱。
所述的靶标后部设置牵引口,靶标通过牵引口和牵引绳连接;靶船上还设置自动驾驶装置、驾驶室,基座通过转动轴活动连接转接头。
所述的检靶系统的检靶装置传感器安装于靶船的驾驶室顶部,除天线外,检靶装置传感器为全船最高处,检靶装置传感器设置为能够直接收集导弹来袭方向、水柱高度参数的结构,检靶系统的计算处理模块布置于驾驶室内,将收集的传感器参数实时计算,转化为弹道结论,为地面控制站和训练基地评价训练效果提供评判依据。
所述的多域靶标系统的靶标设置为能够在装载状态和释放状态之间切换的结构,靶标处于装载状态时,靶标处于释放状态时,承载框处于水平状态,与靶船的主甲板处于平行状态,牵引电机处于收紧状态;靶标位于承载框内,靶标的牵引口与牵引钩勾连,靶标状态固定;所述的靶标处于释放状态时,承载框处于倾斜状态,与靶船的主甲板处于夹角状态,牵引电机处于松开状态;靶标的牵引口与对应的牵引钩脱离,靶标离开承载框内,靶标处于释放状态。
采用本发明的技术方案,工作原理及有益效果如下所述:
本发明所述的多域靶标系统及其控制方法,系统结构简单,方法步骤简单,能够方便可靠实现无人释放、无人回收靶标,减少人员海上准备时间,运行的靶标系统可模拟低空移动目标、可模拟水面低速目标、可模拟海面高速移动目标、可充当鱼雷靶标,实现一套系统同时满足轻武器、舰炮、反舰导弹、直升机等不同打靶训练任务,投入成本低。本发明所述的多域靶标系统及其控制方法,整套靶标系统将人员安全降到最低,无人驾驶,无人释放靶标,无人实时回传,无人回收靶标,自动返航,从物理空间上保证了无人员伤亡的事件发生。
附图说明
下面对本说明书各附图所表达的内容及图中的标记作出简要的说明:
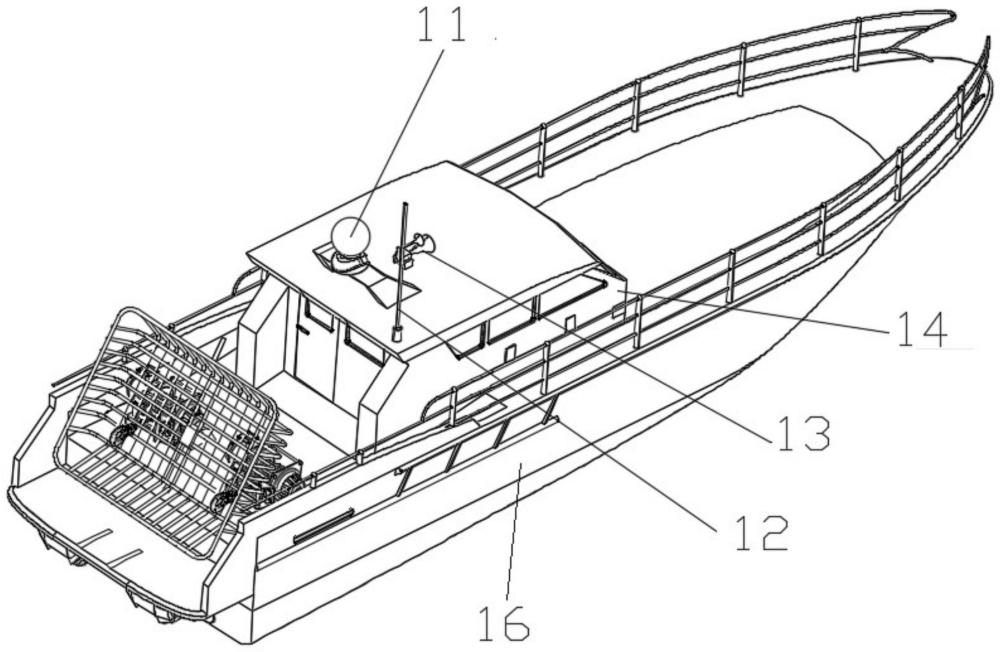
图1为本发明所述的多域靶标系统的结构示意图;
图2为本发明所述的多域靶标系统的靶标的正视结构示意图;
图3为本发明所述的多域靶标系统的靶标的侧视结构示意图;
图4为本发明所述的多域靶标系统的靶船卸载靶标后的结构示意图;
图5为本发明所述的多域靶标系统处于轻武器打靶模式时的状态示意图;
图6为本发明所述的多域靶标系统处于空中单靶模式时的状态示意图;
图7为本发明所述的多域靶标系统处于空中双靶模式时的状态示意图;
图8为本发明所述的多域靶标系统处于水面单靶模式时的状态示意图;
图9为本发明所述的本发明所述的多域靶标系统处于水面双靶模式时的状态示意图;
图10为本发明所述的多域靶标系统的系统原理示意图;
附图中标记分别为:1、牵引电机;2、承载框;3、牵引钩;4、转接头;5、转动轴;6、基座;7、靶标;8、推进装置;9、配重舱;10、牵引口;11、检靶系统传感器;12、图传数传天线;13、自动驾驶装置;14、驾驶室;15、牵引绳;16、靶船(无人艇)。
具体实施方式
下面对照附图,通过对实施例的描述,对本发明的具体实施方式如所涉及的各构件的形状、构造、各部分之间的相互位置及连接关系、各部分的作用及工作原理等作进一步的详细说明:
如附图1-附图10所示,本发明为一种多域靶标系统的控制方法,所述的多域靶标系统的控制方法的控制步骤为:
S1.检靶系统的检靶系统传感器11安装于靶船16的驾驶室14顶部,除天线外,检靶装置传感器11位于全船最高处,避免了靶船上其他装置对于传感器的遮挡和影响,检靶装置传感器11直接收集导弹来袭方向、水柱高度参数,检靶系统的计算处理模块布置于驾驶室14内,将收集的传感器参数实时计算,转化为弹道结论,为地面控制站和训练基地评价训练效果提供评判依据;S2.所述的多域靶标系统的控制方法的控制模式启动前,靶标7处于装载状态时,靶标7处于释放状态时,承载框2处于水平状态,与靶船16的主甲板处于平行状态,牵引电机1处于收紧状态;靶标7位于承载框2内,每个靶标7与对应的牵引钩3勾连,靶标7状态固定;S3.所述的多域靶标系统的控制方法的控制模式启动后,靶标7处于释放状态时,承载框2处于倾斜状态,与靶船16的主甲板处于夹角状态,牵引电机1处于松开状态;靶标7与对应的牵引钩3脱离,靶标7离开承载框2内,靶标7处于释放状态;S4.所述的多域靶标系统的控制方法的控制模式包括空中单靶模式、空中双靶模式、水面单靶模式、水面双靶模式、轻武器单打靶模式、轻武器双打靶模式。上述步骤,针对现有技术中的不足,提出改进的技术方案。本发明所述的多域靶标系统及其控制方法,结构简单,步骤简单,能够方便可靠实现无人释放、无人回收靶标,减少人员海上准备时间,运行的靶标系统可模拟低空移动目标、可模拟水面低速目标、可模拟海面高速移动目标、可充当鱼雷靶标,从而实现一套系统同时满足轻武器、舰炮、反舰导弹、直升机等打靶训练任务。本发明所述的多域靶标系统及其控制方法,整套靶标系统将人员安全降到最低,无人驾驶,无人释放靶标,无人实时回传,无人回收靶标,自动返航,从物理空间上保证了无人员伤亡的事件发生。
所述的多域靶标系统处于空中单靶模式时:
任务执行前,输入靶船7航行路径和速度、时间参数,对靶船7进行任务规划;需要进入空中单靶模式时,释放固定在承载框2内的靶标7,牵引电机1控制牵引绳15缓慢释放,承载框2缓慢倾斜,倾斜至一定角度后停止,牵引绳15继续释放,靶标7的配重舱9内装满氦气,能够克服自重,控制靶标7漂浮在空中,继续释放牵引绳15,同时靶船16继续航行,牵引绳释放至距离满足要求时,停止释放,牵引电机1固定;靶船16的航速控制了靶标7的飞行速度,用来模拟低速空中目标;训练舰船航渡状态下,要求舰员对靶标7进行高射炮、舰炮射击,模拟舰船武器攻击低空低速目标的场景;靶标7被击中后,会产生大片荧光分,从而肉眼判断是否击中靶标7。上述步骤,有效满足多域靶标系统处于空中单靶模式下的应用要求。
所述的多域靶标系统处于空中双靶模式时:任务执行前,输入靶船16航行路径和速度、时间参数,对靶船7进行任务规划;需要进入空中双靶模式时,先释放一个靶标7,再释放另一个靶标7,两个靶标7释放步骤相同,但第二靶标7距离靶船16的距离小于第一个靶标7距离靶船16的距离,保证两个靶标7不会相互缠绕;靶船16的航速控制了靶标7的飞行速度,用来模拟低速空中目标;训练舰船航渡状态下,要求舰员对靶标7进行高射炮、舰炮射击,模拟舰船武器攻击低空低速目标的场景;靶标7被击中后,会产生大片荧光分,从而肉眼判断是否击中靶标7。上述步骤,有效满足多域靶标系统处于空中双靶模式下的应用要求。
所述的多域靶标系统处于水面单靶模式时:任务执行前,输入靶船16航行路径和速度、时间参数;需要进入水面单靶模式时,释放固定在承载框2内的靶标7,牵引电机1控制牵引绳15缓慢释放,承载框2缓慢倾斜,倾斜至一定角度后停止,牵引绳15继续释放,靶标7的配重舱9内装满海水/淡水,靶标7无法漂浮在空中,滑落至海水中,继续释放牵引绳15,同时靶船16继续航行,牵引绳15释放至距离满足要求时,停止释放,牵引电机1固定;靶船16的航速控制靶标7的航行速度,模拟高速航行的小型快艇;训练舰船航渡状态下,要求舰员对靶标7进行导弹射击,模拟两艘舰船远距离对抗、使用反舰导弹的场景;靶标7被反舰导弹击中后,会产生巨大的浪花,从而判断是否击中靶标7;训练舰船航渡状态下,要求直升机远距离对靶标7进行识别、定位、火箭弹/导弹射击,模拟直升机攻击小型舰船的场景;靶标7被反舰导弹击中后,会产生巨大的浪花,从而判断是否击中靶标7。上述步骤,有效满足多域靶标系统处于水面单靶模式下的应用要求。
所述的多域靶标系统处于水面双靶模式时:任务执行前,输入靶船16航行路径和速度、时间参数;需要进入水面双靶模式时,先释放一个靶标7,再释放另一个靶标7,两个靶标7释放步骤相同,但第二个靶标7距离靶船16的距离小于第一个靶标7距离靶船16的距离,保证两个靶标7不会相互缠绕;靶船16的航速控制多功能靶标的速度,模拟高速航行的小型快艇;训练舰船航渡状态下,要求舰员对靶标7进行导弹射击,模拟三艘舰船远距离对抗、使用反舰导弹的场景;靶标7被反舰导弹击中后,会产生巨大的浪花,从而判断是否击中靶标7。训练舰船航渡状态下,要求直升机远距离对靶标7进行识别、定位、火箭弹/导弹设计,模拟直升机攻击小型舰船的场景;多功能靶标7被反舰导弹击中后,会产生巨大的浪花,从而判断是否击中靶标7。上述步骤,有效满足多域靶标系统处于水面双靶模式下的应用要求。
所述的多域靶标系统处于轻武器打靶模式时:任务执行前,输入靶船16航行路径和速度、时间参数;轻武器打靶模式下,多功能靶标7被固定在承载框2内;训练舰船航渡状态下,要求舰员进行轻武器射击,射击靶标7,模拟两艘舰船近距离轻武器对抗的场景;靶标7被轻武器(自动机枪、步枪等)击中后,荧光粉则被冲击散开,夜晚状态下,红外夜视仪能够清晰观察到是否有荧光粉,从而判断是否击中靶标7。上述步骤,有效满足多域靶标系统处于轻武器打靶模式下的应用要求。
本发明还涉及一种步骤简单,能够方便可靠实现无人释放、无人回收靶标,减少人员海上准备时间,运行的靶标系统可模拟低空移动目标、可模拟水面低速目标、可模拟海面高速移动目标、可充当鱼雷靶标,从而实现一套系统同时满足轻武器、舰炮、反舰导弹、直升机等打靶训练任务的多域靶标系统,包括靶标7、靶船16,靶船16上安装牵引电机1,牵引电机1连接牵引绳15,牵引绳15连接靶标7,靶船16上同时设置基座6,基座6活动连接转接头4,转接头4固定连接承载框2,靶船16上设置检靶系统传感器11、图传数传天线12,靶标7上设置推进装置8、配重舱9。所述的靶标7后部设置牵引口10,靶标7通过牵引口10和牵引绳15连接;靶船16上还设置自动驾驶装置13、驾驶室14,基座6通过转动轴5活动连接转接头4。上述结构,针对现有技术中的不足,提出改进的技术方案。通过特殊的结构设置及控制方法,能够方便可靠实现无人释放、无人回收靶标,减少人员海上准备时间,运行的靶标系统可模拟低空移动目标、可模拟水面低速目标、可模拟海面高速移动目标、可充当鱼雷靶标,从而实现一套系统同时满足轻武器、舰炮、反舰导弹、直升机等打靶训练任务。本发明所述的多域靶标系统及其控制方法,整套靶标系统将人员安全降到最低,无人驾驶,无人释放靶标,无人实时回传,无人回收靶标,自动返航,从物理空间上保证了无人员伤亡的事件发生。
所述的检靶系统的检靶装置传感器11安装于靶船16的驾驶室14顶部,除天线外,检靶装置传感器11为全船最高处,避免了船上其他装置对于传感器的影响,检靶装置传感器11设置为能够直接收集导弹来袭方向、水柱高度参数的结构,检靶系统的计算处理模块布置于驾驶室14内,将收集的传感器参数实时计算,转化为弹道结论,为地面控制站和训练基地评价训练效果提供评判依据。
所述的多域靶标系统的靶标7设置为能够在装载状态和释放状态之间切换的结构,靶标7处于装载状态时,靶标7处于释放状态时,承载框2处于水平状态,与靶船16的主甲板处于平行状态,牵引电机1处于收紧状态;靶标7位于承载框2内,靶标7的牵引口10与牵引钩3勾连,靶标7状态固定;所述的靶标7处于释放状态时,承载框2处于倾斜状态,与靶船16的主甲板处于夹角状态,牵引电机1处于松开状态;靶标7的牵引口10与对应的牵引钩3脱离,靶标7离开承载框2内,靶标7处于释放状态。
本发明所述的多域靶标系统及其控制方法,系统结构简单,方法步骤简单,能够方便可靠实现无人释放、无人回收靶标,减少人员海上准备时间,运行的靶标系统可模拟低空移动目标、可模拟水面低速目标、可模拟海面高速移动目标、可充当鱼雷靶标,实现一套系统同时满足轻武器、舰炮、反舰导弹、直升机等不同打靶训练任务,投入成本低。本发明所述的多域靶标系统及其控制方法,整套靶标系统将人员安全降到最低,无人驾驶,无人释放靶标,无人实时回传,无人回收靶标,自动返航,从物理空间上保证了无人员伤亡的事件发生。
上面结合附图对本发明进行了示例性的描述,显然本发明具体的实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种改进,或未经改进将本发明的构思和技术方案直接应用于其他场合的,均在本发明的保护范围内。