一种基于深度卷积神经网络的宅基地目标检测方法
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及图像处理和计算机视觉技术领域,具体涉及一种基于深度卷积神经网络的宅基地目标检测方法。
背景技术
农村宅基地识别是观察农村的土地变化和经济发展的重要手段。近年来,高分辨率遥感影像开始覆盖人们生活的各个方面,不再只针对发达的城市地区。识别这些宅基地,对农村土地利用情况进行研究,则是新农村建设的基础。中国作为传统的农业大国,农村发展至关重要,快速、准确地获得农村宅基地的信息对于统筹城乡发展和节约集约用地有着重大的帮助。农村宅基地识别对于履行农村宅基地改革与管理职责、全面掌握农村宅基地现状、保护农民权益具有十分重要的意义。而目标检测是计算机视觉以及人工智能领域的一个基本问题,其主要目标是精确定位出图像中各种目标的类别和位置边框信息,可将该技术用于宅基地监管、监测和调查工作。
从上世纪90年代到本世纪2010年之前,传统的机器学习算法在遥感图像中的目标检测发挥了很大的作用,绝大多数的目标检测任务都由传统的机器学习算法完成。首先,依据特定的目标设计特定的特征提取算法,然后再将得到的特征向量送入选定的特征分类器进行训练。但是传统的机器学习算法特征提取困难,需要花大量的时间来设计较为合理的特征提取算法。其次,传统机器学习算法中使用的分类器如SVM网络结构泛化能力差,不具有表达复杂函数的能力。传统的分类过程存在使用门槛高、数据处理过程繁琐、识别速度慢、准确率不高和可迁移性差等弊端。
目前,深度卷积神经网络以其优良的性能,在图像处理领域的应用发展迅速,并且取得了很好的进展,而基于深度卷积神经网络的目标检测算法对遥感图像中的一个或多个目标的类别和位置进行自动化判定与识别,并以矢量框的形式作为标记,确定其类别和位置。然而传统的目标检测方法所使用的滑动窗口方法或者候选窗口方法效率较低,运算复杂度高,检测速度慢,并且依赖手工设计的特征,到了后期发展便出现瓶颈,难以在速度和精度上取得更大的突破。
发明内容
针对现有技术中的上述不足,本发明提供的一种基于深度卷积神经网络的宅基地目标检测方法解决了通过传统的分类过程存在使用门槛高、识别速度慢、准确率不高的问题。
为了达到上述发明目的,本发明采用的技术方案为:一种基于深度卷积神经网络的宅基地目标检测方法,包括以下步骤:
S1、通过无人机采集宅基地遥感图像集;
S2、对宅基地遥感图像集进行预处理,构建训练集、验证集和待识别的宅基地遥感图像;
S3、构建Faster R-CNN网络模型,采用训练集对Faster R-CNN网络模型进行训练,采用验证集对参数进行调整,得到训练完成的Faster R-CNN网络模型;
S4、采用训练完成的Faster R-CNN网络模型对待识别的宅基地遥感图像进行检测,得到宅基地目标检测结果,实现对遥感图像宅基地检测。
进一步地,步骤S2包括以下分步骤:
S21、对宅基地遥感图像集中所有图像进行裁剪,得到第一宅基地遥感标准图像集;
S22、将第一宅基地遥感标准图像集进行筛选,得到含宅基地目标且该目标位于裁剪分割线内的第二宅基地遥感标准图像集;
S23、对第二宅基地遥感标准图像集进行标注处理,得到宅基地遥感标注图像集;
S24、对宅基地遥感标注图像集进行扩充处理,得到宅基地遥感扩充图像集;
S25、对宅基地遥感扩充图像集进行透视矫正,得到样本图像数据集;
S26、将样本图像数据集划分为训练集、验证集和待识别的宅基地遥感图像。
进一步地,步骤S23包括以下分步骤:
S231、对第二宅基地遥感标准图像集中每张图像创建对应的xml格式文件;
S232、对xml格式文件标注宅基地物体的标签、图像尺寸和宅基地物体的boundingbox坐标,得到宅基地遥感标注图像集;
所述步骤S24具体为:以90°、180°和270°三种角度对宅基地遥感标注图像集进行旋转和翻转,使bounding box的边界与坐标轴平行,得到宅基地遥感扩充图像集。
上述进一步方案的有益效果为:原有宅基地遥感图像数据集通过标注处理,和使用翻转和旋转的方法进行数据增强并进行了透视矫正,扩大了样本规模,更能模拟真实情况,同时提升了算法中特征提取对于不同形态的样本的表征能力,数据集的预处理使得Faster R-CNN网络模型训练更加准确。
进一步地,步骤S3中Faster R-CNN网络模型包括:特征提取网络、区域建议网络和目标定位网络;
所述特征提取网络的输入端作为Faster R-CNN网络模型的输入端,其输出端分别与目标定位网络的第一输入端和区域建议网络的输入端连接;
所述区域建议网络的输出端与目标定位网络的第二输入端连接;
所述目标定位网络的输出端作为Faster R-CNN网络模型的输出端。
进一步地,目标定位网络包括:ROI池化层、全连接层、softmax分类模块和第一边框回归模块;
所述ROI池化层的第一输入端作为目标定位网络的第一输入端,其第二输入端作为目标定位网络的第二输入端,其输出端与全连接层的输入端连接;
所述全连接层的输出端分别与softmax分类模块的输入端和第一边框回归模块的输入端连接;
所述softmax分类模块的输出端和第一边框回归模块的输出端共同作为目标定位网络的输出端。
进一步地,区域建议网络包括:滑动窗口模块、分类模块、第二边框回归模块和前景框模块;
所述滑动窗口模块的输入端作为区域建议网络的输入端,其输出端分别与分类模块的输入端和第二边框回归模块的输入端连接;
所述前景框模块的输入端分别与分类模块的输出端和第二边框回归模块的输出端连接,其输出端作为区域建议网络的输出端;
所述滑动窗口模块中的锚点数量为16个,具体为:64×64、128×128、256×256、512×512,其依次对应的比例大小为:3∶2、1∶2、1∶1、2∶1。
上述进一步方案的有益效果为:由于宅基地遥感图像具有多尺度的特点,且大部分宅基地在图像中的尺度较小,增加一组(64×64)的大小和(3∶2)的比例,用来提高小尺度物体的检测效率。
进一步地,步骤S3中Faster R-CNN网络模型中的特征提取网络、区域建议网络和目标定位网络分别独立训练。
进一步地,区域建议网络训练的损失函数为:
其中,L({p
进一步地,步骤S4包括以下分步骤:
S41、采用特征提取网络提取待识别的宅基地遥感图像中的特征图;
S42、将特征图输入区域建议网络中,生成候选区域;
S43、将特征图和候选区域输入目标定位网络,采用非软化非极大值抑制算法对特征图和候选区域进行得分计算,得到宅基地目标检测结果;
非软化非极大值抑制算法的公式为:
其中,
综上,本发明的有益效果为:
(1)、一种基于深度卷积神经网络的宅基地目标检测方法,在数据准备阶段,对原有宅基地遥感图像数据集使用翻转和旋转的方法进行数据增强并进行了透视矫正,使得其对Faster R-CNN网络模型训练更加准确。
(2)、增加区域建议网络中的锚点数量,用以提高模型对于小尺度物体的检测精度与效率;并且改进了Faster R-CNN模型的目标定位网络,使用soft-NMS方法代替原有的NMS方法,改善在有物体相互遮挡情况下的目标检测性能。本发明方法中改进的Faster R-CNN网络模型不仅提高了宅基地遥感图像识别的准确率,减少了模型训练所需要的资源和时间,同时让模型更具有鲁棒性,可以高效的完成对宅基地遥感图像的目标检测任务。
附图说明
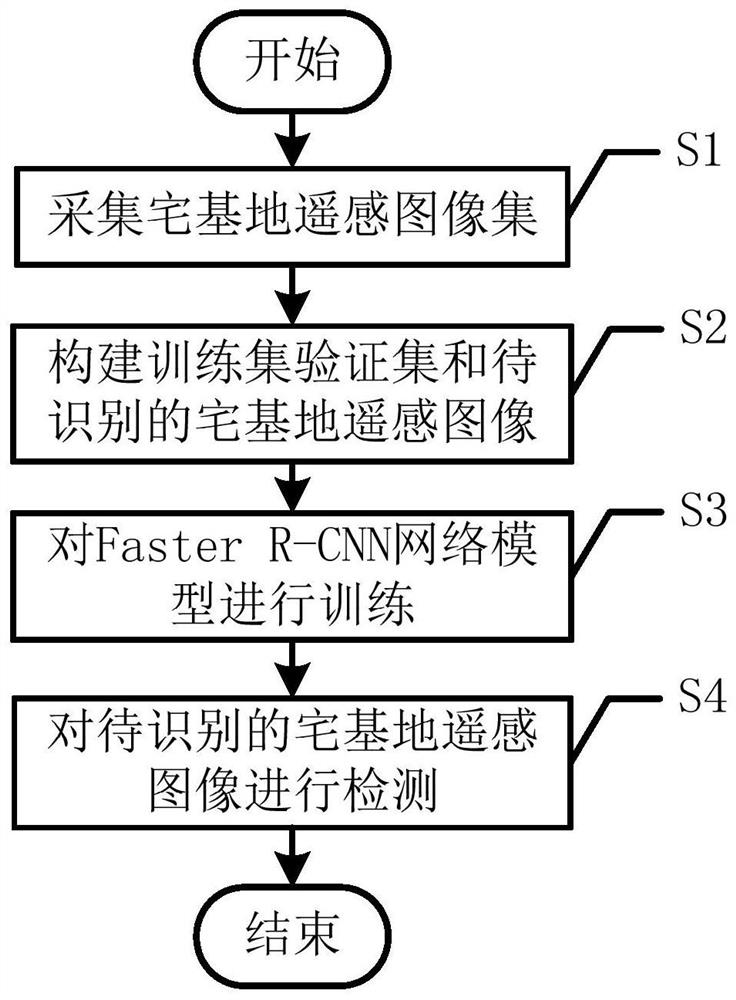
图1为一种基于深度卷积神经网络的宅基地目标检测方法的流程图。
图2为Faster R-CNN网络模型的结构示意图。
具体实施方式
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
如图1所示,一种基于深度卷积神经网络的宅基地目标检测方法,包括以下步骤:
S1、通过无人机采集宅基地遥感图像集;
S2、对宅基地遥感图像集进行预处理,构建训练集、验证集和待识别的宅基地遥感图像;
步骤S2包括以下分步骤:
S21、对宅基地遥感图像集中所有图像进行裁剪,得到第一宅基地遥感标准图像集;
S22、将第一宅基地遥感标准图像集进行筛选,得到含宅基地目标且该目标位于裁剪分割线内的第二宅基地遥感标准图像集;
S23、对第二宅基地遥感标准图像集进行标注处理,得到宅基地遥感标注图像集;
步骤S23包括以下分步骤:
S231、对第二宅基地遥感标准图像集中每张图像创建对应的xml格式文件;
S232、对xml格式文件标注宅基地物体的标签、图像尺寸和宅基地物体的boundingbox坐标,得到宅基地遥感标注图像集;
S24、对宅基地遥感标注图像集进行扩充处理,得到宅基地遥感扩充图像集;
步骤S24具体为:以90°、180°和270°三种角度对宅基地遥感标注图像集进行旋转和翻转,使bounding box的边界与坐标轴平行,得到宅基地遥感扩充图像集。
S25、对宅基地遥感扩充图像集进行透视矫正,得到样本图像数据集;
由于宅基地遥感图像由于是无人机在空中拍摄,背景一般比较复杂,且目标多种多样,难以预测,还容易受环境影响如地球自转、大气折射、大气环境等,产生对象畸变现象,针对这种情况,需要对宅基地遥感图像进行透视校正。
透视变换是通过将产生畸变的目标通过映射变化到一个不同的视平面,公式为:
其中,(u,v)为宅基地遥感扩充图像集的坐标,
其中,
S26、将样本图像数据集划分为训练集、验证集和待识别的宅基地遥感图像。
S3、构建Faster R-CNN网络模型,采用训练集对Faster R-CNN网络模型进行训练,采用验证集对参数进行调整,得到训练完成的Faster R-CNN网络模型;
如图2所示,步骤S3中Faster R-CNN网络模型包括:特征提取网络、区域建议网络和目标定位网络;
所述特征提取网络的输入端作为Faster R-CNN网络模型的输入端,其输出端分别与目标定位网络的第一输入端和区域建议网络的输入端连接;
所述区域建议网络的输出端与目标定位网络的第二输入端连接;
所述目标定位网络的输出端作为Faster R-CNN网络模型的输出端。
目标定位网络包括:ROI池化层、全连接层、softmax分类模块和第一边框回归模块;
所述ROI池化层的第一输入端作为目标定位网络的第一输入端,其第二输入端作为目标定位网络的第二输入端,其输出端与全连接层的输入端连接;
所述全连接层的输出端分别与softmax分类模块的输入端和第一边框回归模块的输入端连接;
所述softmax分类模块的输出端和第一边框回归模块的输出端共同作为目标定位网络的输出端。
区域建议网络包括:滑动窗口模块、分类模块、第二边框回归模块和前景框模块;
所述滑动窗口模块的输入端作为区域建议网络的输入端,其输出端分别与分类模块的输入端和第二边框回归模块的输入端连接;
所述前景框模块的输入端分别与分类模块的输出端和第二边框回归模块的输出端连接,其输出端作为区域建议网络的输出端;
所述滑动窗口模块中的锚点数量为16个,具体为:64×64、128×128、256×256、512×512,其依次对应的比例大小为:3∶2、1∶2、1∶1、2∶1。
步骤S3中Faster R-CNN网络模型中的特征提取网络、区域建议网络和目标定位网络分别独立训练。
区域建议网络训练的损失函数为:
其中,L({p
在本实施例中,特征提取网络为改进的ResNet-101残差网络结构,用来解决网络层数达到一定程度时出现的梯度消失现象;ResNet-101网络中残差单元直接添加了一条输入到输出之间的通道,设输入为x,原有的输入输出之间的映射关系为F(x),则经过添加残差单元后输出变为F(x)+x,从而使得网络的梯度增加了一个恒等映射;这种学习目标的变化(由学习原输出变为学习输出输入的差)使得网络的优化更加容易,有效的缓解了梯度消散现象的发生,打破了网络的不对称性,简化了学习目标的难度,避免了随着网络深度的增加造成的分类精度饱和问题;在本实施例中,区域建议网络为RPN。
S4、采用训练完成的Faster R-CNN网络模型对待识别的宅基地遥感图像进行检测,得到宅基地目标检测结果,实现对遥感图像宅基地检测。
步骤S4包括以下分步骤:
S41、采用特征提取网络提取待识别的宅基地遥感图像中的特征图;
S42、将特征图输入区域建议网络中,生成候选区域;
S43、将特征图和候选区域输入目标定位网络,采用非软化非极大值抑制算法对特征图和候选区域进行得分计算,得到宅基地目标检测结果;
非软化非极大值抑制算法的公式为:
其中,
改进的soft-NMS方法的目的是考虑到遥感图像的复杂性和多变性,当两个物体互相遮挡时,后面物体的bouding box很可能会被NMS算法筛选掉,而soft-NMS方法就是改进在此情况下的检测性能。
- 一种基于深度卷积神经网络的宅基地目标检测方法
- 一种基于深度卷积神经网络的目标检测方法及装置