一种加弹机自动落筒机器人上下料机械手
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及加弹机自动取料技术领域,尤其涉及一种加弹机自动落筒机器人上下料机械手。
背景技术
现有加弹机纱团下料和纸筒上料主要采用人工或简易半自动机械进行。人工搬运形式,工人劳动强度大,效率低;简易半自动下料机械柔性差,只针对单一机型使用,且需要人员跟随控制,效率较人工上下料并没有明显提高;目前少数纺织厂在用的落筒机械大部分为20年前的设备,控制接结构较为过时。
发明内容
本发明目的是解决夹弹机落筒机器人对纱团的下料、纸筒的拾取和在加弹机上的装夹、以及棉纱和纸筒的搬运等功能,采用了如下技术方案;
一种加弹机自动落筒机器人上下料机械手,包括有背板、纸筒取放装置、电气盒、转动装置、摆杆机构、纱团取放装置、摆动限位机构,所述纸筒取放装置和所述纱团取放装置通过连接板固定在所述摆杆机构上,摆杆机构通过两端的安装座固定在所述背板上,所述转动装置和摆动限位机构被摆杆机构的转轴穿过,摆杆机构通过安装座安装到背板上,摆杆机构的摆轴与转动装置的摆动板相连,所述摆动限位机构的感应板固定到转轴上,电气盒固定在背板上。
进一步的技术方案,所述摆杆机构上设有伺服电机,转轴与同步带轮配合固定,伺服电机带动同步带轮旋转进一步的带动转轴旋转,转轴通过连接板固定与摆轴同步旋转。
进一步的技术方案,所述纸筒取放装置通过摆动气缸带动摆臂运动,摆臂上的夹紧机构对纸筒进行夹取。
进一步的技术方案,所述纱团取放机构通过气缸带动夹板对纱团夹紧。
进一步的技术方案,所述摆动限位机构上设有上极限传感器、下极限传感器对转轴的转动角度进行限位,保护转轴的转动角度。
本发明的有益效果为
纸筒取放装置、纱团取放装置连接到摆杆机构上结构紧凑,布局合理;
摆杆机构的转轴可带动纸筒取放装置和套纱团取料装置同时摆动,转动装置可驱动摆杆机构的摆轴单独摆动,满足纱团取料姿态、纸筒上料姿态和放纱团取纸筒姿态的动作转换;
摆杆机构由伺服电机作为主动力驱动,通过减速机和同步带轮实现大速比的要求,其独特的机构设计满足转动位置精确、小功率大转矩和摆动平稳等要求;
摆动限位机构具有摆动原点定位、摆动左右极限定位的功能,其传感器为槽型开关,定位精度高。
附图说明
为了易于说明,本发明由下述的具体实施及附图作以详细描述。
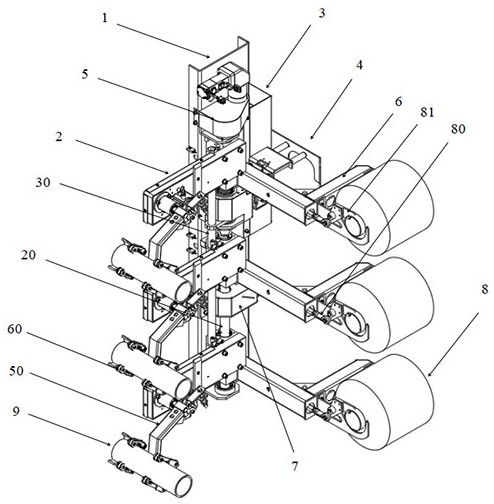
图1为本发明的结构图;
图2为本发明图1的纱团取料姿态示意图;
图3为本发明图2的纸筒上料姿态示意图;
图4为本发明图2的放纱团取纸筒姿态示意图。
图中:1背板、2纸筒取放装置、3电气盒、4转动装置、5摆杆机构、6纱团取放装置、7摆动限位机构、8纱团、9纸筒、20转轴、30摆轴、50摆臂、60夹紧机构、80气缸、81夹板。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图中示出的具体实施例来描述本发明。但是应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
如图1-4所示,本具体实施方式采用以下技术方案:一种加弹机自动落筒机器人上下料机械手,包括有背板1、纸筒取放装置2、电气盒3、转动装置4、摆杆机构5、纱团取放装置6、摆动限位机构7,所述纸筒取放装置2和所述纱团取放装置6通过连接板(图中未标注)固定在所述摆杆机构5上,摆杆机构5通过两端的安装座固定在所述背板1上,所述转动装置4和摆动限位机构7被摆杆机构5的转轴20穿过,摆杆机构5通过安装座(图中未标注)安装到背板1上,摆杆机构5的摆轴30与转动装置4的摆动板(图中未标注)相连,所述摆动限位机构7的感应板(图中未标注)固定到转轴20上,电气盒3固定在背板1上。
本发明中,所述摆杆机构5上设有伺服电机(图中未标记),转轴20与同步带轮(图中未标注)配合固定,伺服电机带动同步带轮旋转进一步的带动转轴20旋转,与转轴20通过连接板固定的摆轴30同步旋转。摆杆机构5由伺服电机作为主动力驱动,通过减速机和同步带轮实现大速比的要求,其独特的机构设计满足转动位置精确、小功率大转矩和摆动平稳等要求,纸筒取放装置2、纱团取放装置6连接到摆杆机构5上结构紧凑,布局合理;摆杆机构5的转轴20可带动纸筒取放装置2和纱团取料装置6同时摆动,转动装置4可驱动摆杆机构5的摆轴30单独摆动,满足纱团取料姿态如图2所示、纸筒上料姿态如图3所示和放纱团取纸筒姿态如图3的动作转换;
本发明中,所述纸筒取放装置2通过摆动气缸(图中未标注)带动摆臂50运动,摆臂50上的夹紧机构60对纸筒9进行夹取;
本发明中,所述纱团取放机构6通过气缸80带动夹板81对纱团8夹紧;
本发明中,所述摆动限位机构7上设有上极限传感器(图中未标注)、下极限传感器(图中未标注)对转轴20的转动角度进行限位,保护转轴20的转动角度,摆动限位机构7具有摆动原点定位、摆动左右极限定位的功能,其传感器为槽型开关,定位精度高。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种加弹机自动落筒机器人上下料机械手
- 一种加弹机自动落筒机器人AGV行走装置