基于事件触发机制的遥操作系统分数阶滑模同步控制方法
文献发布时间:2023-06-19 10:33:45
技术领域
本发明属于机器人遥操作系统控制技术,特别是一种基于事件触发机制的遥操作系统分数阶滑模同步控制方法。
背景技术
作为人机交互的工具,遥操作系统能够将人的感知和操作能力延伸到远程工作环境中,通过通信网络使得从机器人可以模拟主机器人的行为,主机器人又可以根据反馈的从机器人工作状态调整控制策略,最终实现对远端被控对象的有效操作。目前已被广泛应用于空间作业、海洋探测和核能技术等领域。特别地,随着今年全球范围新冠病毒的爆发,减少人与人之间的接触,是防止疫情进一步蔓延的有效途径。在这样严峻的形势下,遥操作系统因其在远程手术和远程服务中的独特应用价值而受到越来越多的关注。目前,遥操作系统的高精控制面临很大的挑战,一方面由于机器人遥操作是一个典型的多变量非线性耦合系统,且易受到系统模型、参数变化以及外界工作环境扰动等不确定性的影响。另一方面,主从机器人之间的信息交互不可避免地受到网络带宽和传输速率的限制。
滑模变结构非线性控制理论对外部干扰、参数变化和未建模动态具有很好的鲁棒性。为实现对遥操作系统的高精度、强鲁棒和快速性的同步控制目标,最早提出了整数阶滑模(Integer-order sliding mode control,IOSMC)有限时间控制方法,在遥操作系统的应用中取得了良好的效果。实际上,分数阶(Fractional-order,FO)微积分作为整数阶微积分的推广,使得系统以及控制器的阶次不仅仅局限于整数,C.Yin提出了分数阶滑模控制方法(Fractional-order sliding mode control,FOSMC),并指出与IOSMC相比,FOSMC可以提高控制器的自由度,具有更丰富的动态特性、更高的鲁棒性、更快的响应速度和收敛速度。而对于高精度要求的遥操作系统,响应速度和收敛速度的快慢也是重要的性能指标之一。至今,主从机器人的信息交互大多都依赖于连续时间通信或者间歇通信协议,需要在控制器和执行器之间不间断、定期传输信号,频繁响应,从而实现系统的控制目标。然而,在实际应用中,上述基于时间触发的控制方法存在以下问题:1)执行器的频繁响应会加速机械设备的损耗老化、缩短使用寿命。2)控制器周期性传输和更新可能是冗余的,会浪费处理器的计算处理资源,增加通信负担。为弥补不足,Dong Yue等众多学者提出了事件触发控制策略,在确保系统所需的性能同时,降低控制器更新的频率(控制信息的更新仅在事件触发之后)、节约通信带宽资源。大部分触发机制建立在状态触发误差输入状态稳定的假设条件之下,在存在系统未知参数的情况下,这个假设是不合理的。因此迫切需要提出事件触发机制下的遥操作系统的位置跟踪控制策略,从而解决能量、计算和通信约束问题。
发明内容
本发明针对上述现有技术中的缺陷,基于事件触发机制,提出一种遥操作系统分数阶滑模同步控制方法。该方法包括考虑外部扰动和参数不确定性,建立遥操作系统动力学模型,选取主从机器人,通过通信网络交互组建遥操作系统,确定动力学模型的系统参数,利用位置跟踪误差与分数阶微积分,设计分数阶非奇异快速终端滑模面方程,通过设定主从机器人信息交互的触发事件条件,基于滑模设计自适应分数阶非奇异快速终端滑模控制器,设计李雅普诺夫函数进行稳定性分析,证明系统闭环状态信号的有界性,从机器人可在有限时间内跟踪主机器人,实现遥操作系统的快速高精同步控制。本发明可避免奇异问题,同时扩大控制器的自由度,加快收敛速度,提高控制精度,降低整数阶滑模面存在的抖振问题,适用性更强,可极大地减少网络带宽和通信资源的占用,提高资源的利用率。
本发明提供一种基于事件触发机制的遥操作系统分数阶滑模同步控制方法,所述方法包括以下步骤:
S1、考虑外部扰动和参数不确定性,建立遥操作系统动力学模型,所述动力学模型为:
其中:
M
其中:M
同时,
其中:
令:
其中:
其中:κ
因此,系统模型(1)式可重新表示为:
S2、选取主机器人和从机器人,通过通信网络交互组建遥操作系统,再分别测量主、从机器人连杆的质量和长度信息及其实时的机器人位置信息,确定动力学模型的系统参数;
S3、利用主机器人和从机器人的位置跟踪误差与Riemann-Liouville分数阶微积分设计分数阶非奇异快速终端滑模面方程;
S4、设定主机器人和从机器人信息交互的触发事件条件,同时基于滑模设计能够补偿测量误差、消除系统不确定性影响的自适应分数阶非奇异快速终端滑模控制器,使得控制器能够避免芝诺现象,并设计李雅普诺夫(Lyapunov)函数进行稳定性分析,证明系统闭环状态信号的有界性。
采用以上基于事件触发机制的遥操作系统分数阶滑模同步控制方法,从机器人可以在有限时间内跟踪主机器人运动,实现遥操作系统的快速高精同步控制。
可优选的,所述步骤S2中动力学模型的系统参数包括主机器人和从机器人的惯性矩阵、科里奥利力和离心力矩阵以及重力矩阵中的标称确定部分,且均可由机械臂的长度、质量以及关节位置信息计算得出。
进一步,所述步骤S3中所述主机器人和从机器人的位置跟踪误差为:
其中:e
所述分数阶非奇异快速终端滑模面方程为:
其中:s
其中:
进一步,所述步骤S4中所述触发事件条件如下:
其中:z
在时间段
基于所设计的滑模面,实际的控制器被选择为:
τ
其中:λ
设计所述自适应分数阶非奇异快速终端滑模控制器为:
其中:
设计自适应律为:
其中:Λ
选取Lyapunov函数:
其中:V表示Lyapunov函数;V
通过稳定性分析,可以保证非线性不确定遥操作系统的有限时间稳定运行。
与现有技术相比,本发明的技术效果为:
(1)本发明通过建立未知外部干扰和参数不确定性情况下的遥操作系统动力学模型,采用分数阶非奇异快速终端滑模面,不仅能够避免奇异问题,而且扩大了控制器的自由度,加快了收敛速度,提高了控制精度,降低了整数阶滑模面存在的抖振问题,适用性更强。
(2)本发明与现有技术中遥操作传统周期采样的同步控制方式相比,所提方法在保证系统同步控制性能的前提下,主从机器人只需在事件触发条件成立时进行间歇通信和控制器传输与更新即可,极大地减少了网络带宽和通信资源的占用,提高了资源的利用率。
附图说明
通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它特征、目的和优点将会变得更明显。
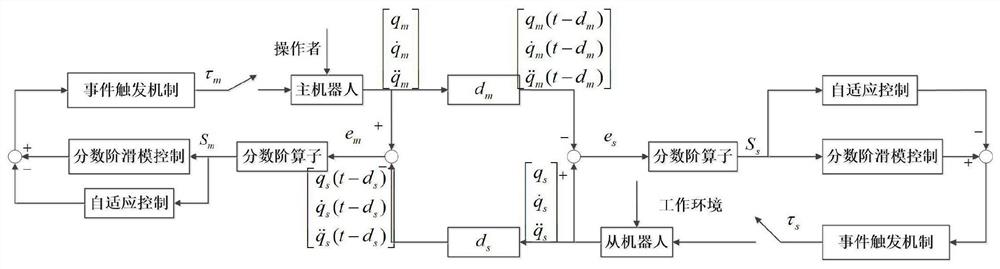
图1是本发明的基于事件触发机制的遥操作系统分数阶滑模同步控制方法的控制原理图;
图2是本发明的双边遥操作系统的结构框图;
图3是本发明的遥操作系统运动轨迹曲线图;
图4a是本发明的与现有整数阶滑模技术的遥操作系统关节1跟踪误差对比图;
图4b是本发明的与现有整数阶滑模技术的遥操作系统关节2跟踪误差对比图;
图4c是本发明的与现有整数阶滑模技术的遥操作系统关节3跟踪误差对比图;
图5是本发明的遥操作系统控制器曲线。
具体实施方式
下面结合附图和实施例对本申请作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与有关发明相关的部分。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
图2示出了本发明的遥操作系统的结构框架示意图,描述了一个完整的遥操作系统,操作者在本地操作主机器人,此时从机器人在现场作业。主机器人将相关控制信息通过通信网络传输至从机器人,从机器人将其状态信息、外界环境的作用力通过网络反馈给主机器人,操作者能真切地感受到远端环境的变化。主从机器人利用反馈信息进行控制策略的调整,最终实现对远端被控对象的有效操作。
图1示出了本发明的基于事件触发机制的遥操作系统分数阶滑模同步控制方法,该方法包括以下步骤:
S1、考虑外部扰动和参数不确定性,建立遥操作系统动力学模型,所述动力学模型为:
其中:
M
其中:M
同时,
其中:
令:
其中:
其中:κ
因此,系统模型(1)式可重新表示为:
S2、选取主机器人和从机器人,通过通信网络交互组建遥操作系统,再分别测量主、从机器人连杆的质量和长度信息及其实时的机器人位置信息,确定动力学模型的系统参数。
所述步骤S2中动力学模型的系统参数包括主机器人和从机器人的惯性矩阵、科里奥利力和离心力矩阵以及重力矩阵中的标称确定部分,且均可由机械臂的长度、质量以及关节位置信息计算得出。
S3、利用主机器人和从机器人的位置跟踪误差与Riemann-Liouville分数阶微积分设计分数阶非奇异快速终端滑模面方程。
所述步骤S3中所述主机器人和从机器人的位置跟踪误差为:
其中:e
所述分数阶非奇异快速终端滑模面方程为:
其中:s
其中:
S4、设定主机器人和从机器人信息交互的触发事件条件,同时基于滑模设计能够补偿测量误差、消除系统不确定性影响的自适应分数阶非奇异快速终端滑模控制器,使得控制器能够避免芝诺现象,并设计李雅普诺夫(Lyapunov)函数进行稳定性分析,证明系统闭环状态信号的有界性,且从机器人可以在有限时间内跟踪主机器人运动,实现遥操作系统的快速高精同步控制。
所述步骤S4中所述触发事件条件如下:
其中:z
在时间段
基于所设计的滑模面,实际的控制器被选择为:
τ
其中:λ
设计所述自适应分数阶非奇异快速终端滑模控制器为:
其中:
设计自适应律为:
其中:Λ
选取Lyapunov函数:
其中:V表示Lyapunov函数;V
其随时间的一阶导数为:
其中:
如图3所示,为本发明中基于事件触发机制的自适应分数阶非奇异快速终端滑模控制器的运动轨迹曲线图。如图4a~4c所示,为本发明中分数阶非奇异终端滑模控制与传统整数阶滑模控制遥操作系统跟踪误差对比图。如图5所示,为本发明中事件触发机制与时间触发机制下的遥操作系统控制器响应比较图。
通过实验结果可以证明所设计控制器的有效性,系统闭环状态信号有界,且从机器人可以在有限时间内跟踪主机器人运动,实现遥操作系统的快速高精同步控制。
本发明通过建立未知外部干扰和参数不确定性情况下的遥操作系统动力学模型,采用分数阶非奇异快速终端滑模面,不仅能够避免奇异问题,而且扩大了控制器的自由度,加快了收敛速度,提高了控制精度,降低了整数阶滑模面存在的抖振问题,适用性更强;与现有技术中遥操作传统周期采样的同步控制方式相比,所提方法在保证系统同步控制性能的前提下,主从机器人只需在事件触发条件成立时进行间歇通信和控制器传输与更新即可,极大地减少了网络带宽和通信资源的占用,提高了资源的利用率。
最后所应说明的是:以上实施例仅以说明而非限制本发明的技术方案,尽管参照上述实施例对本发明进行了详细说明,本领域的普通技术人员应当理解:依然可以对本发明进行修改或者等同替换,而不脱离本发明的精神和范围的任何修改或局部替换,其均应涵盖在本发明的权利要求范围当中。
- 基于事件触发机制的遥操作系统分数阶滑模同步控制方法
- 基于事件触发机制的遥操作系统分数阶滑模同步控制方法