一种电磁驱动结构
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及电磁驱动领域,具体涉及一种用于水中的电磁仿生摆动驱动装置。
背景技术
当今的自主水下机器人(AutonomousUnderwater Vehicle,AUV)已经成为了人类进行海洋研究和探索的重要平台。AUV大多具有类似鱼雷的水动力学外形,采用螺旋桨推进器来产生推进力,利用多个控制面进行机动运动。采用这种设计机构的AUV存在着推进效率低,机动性能差,对环境扰动大等缺点,因此极大地限制了AUV在狭窄,复杂和动态环境中的应用。与人造水下潜器相比,鱼类和鲸豚类等海洋生物经过亿万年的自然选择和环境适应,进化出了集推进和机动运动于一体的推进机制,获得了非凡的水中运动能力,其游动的高效率,高机动性以及良好的隐蔽性都是AUV所无法企及的。随着人类对鱼类游动机理认识的不断深入和相关技术的发展,近年来一种采用仿生推进机制的水下机器人应运而生。
美国麻省理工学院的第一条机器鱼“Robotuna”和后来的“RoboPike”,美国Draper实验室的采用涡控制实现推进的自主水下机器人“VCUUV”,日本运输省船舶技术研究所的系列机器鱼,日本名古屋大学采用形状记忆合金推进的微型波动式水下机器人以及英国Essex大学开发的各种机器鱼。为了实现防水密封,机器鱼大多采用整体密封方式,即以防水蒙皮包裹柔性尾部,并用密封胶粘接在刚性头部上的方式。整体密封方式可在一定程度上实现机器鱼的防水密封,但是具有密封性能差,游动效率低,上升下潜困难等缺点,严重地限制了机器鱼推进性能的提高。另外,以往的机器鱼都采用单一的尾鳍实现推进和转弯,然而自然界中的鱼类除了尾鳍,还具有胸鳍,背鳍,臀鳍,腹鳍等,它们在鱼类的推进,转弯,维持平衡,上升下潜,减速制动等方面起着重要的作用,研究各类鱼鳍的结构和功能,并采用人工的手段模拟复现鱼鳍的运动将大幅提高机器鱼的游动性能。以上两个方面是机器鱼投入实际应用的关键技术难题,灵活可靠的防水密封方式以及运动自如的仿鱼鳍机构在仿生机器鱼领域仍是空白,有待开发。
在专利库中,如CN103950525A、CN102267552A、CN108163168A等,公开了一些基于电磁致动的仿生驱动仿生驱动结构。这些驱动结构的摆动部件穿设于电磁驱动结构的内部,导致驱动结构需要做复杂的防水处理,制造加工难度大,制造成本高昂,也限制了微小型仿生机器鱼的推广。
发明内容
本发明的目的在于,提供用于水中的电磁仿生摆动驱动装置,并简化制造难度与制造成本、操作灵活、运行方便。
本发明为实现上述目的所采用的技术方案为:
一种电磁仿生驱动结构,包括驱动本体,以及至少一个与所述驱动本体配合驱动的摆动件,所述驱动本体包括外壳,所述外壳具备防水结构,所述外壳内部包括电磁驱动装置,所述摆动件在所述防水结构的外部与所述壳体活动连接,所述摆动件能够响应于所述电磁驱动装置实现规律性摆动。
可选地,所述外壳上具有至少一个容纳所述摆动件的空腔结构,所述摆动件包括摆动件本体和致动部,所述致动部活动连接于所述空腔结构内,所述空腔结构内具有磁场,空腔结构的外形与所述磁场共同限制所述致动部的活动范围。
可选地,所述空腔结构内的磁场由所述电磁驱动装置产生,电磁驱动装置涉电单元全部位于防水结构内部。
可选地,所述空腔结构的形状与所述摆动件的致动部形状相匹配,空腔的体积大于致动部的体积。
可选地,所述致动部的的形状呈圆柱形,所述空腔结构具备将圆柱形结构横向插入的开口,并在空腔内形成供圆柱形结构由横向转动至竖直的空间。
可选地,所述摆动件的致动部可手动地从所述空腔结构中插入或移除。
可选地,所述摆动件的所述致动部包括一个或多个电磁感应线圈和/或永磁体。作为优选,所述致动部的永磁体的数量为一个。
可选地,所述电磁驱动装置包括电池、电路板、固定支架以及一个或多个电磁感应线圈和/或永磁体。作为优选,所述电磁驱动装置包括至少一个电磁感应线圈和至少两个永磁体。
可选地,所述致动部的永磁体以及所述电磁驱动装置的永磁体可以采用厚度充磁,径向充磁铁、轴向充磁、轴向多级充磁或周向充磁的方式加工制造。作为优选,所述致动部的永磁体采用径向充磁的圆柱形磁铁,所述电磁驱动装置的永磁体采用轴向充磁的圆柱形磁铁。
可选地,所述电磁驱动装置永磁体为两个轴向充磁圆柱形磁铁,采用平行并列排布,其南北磁性的关系可以相反或相同,优选相反。
可选地,所述致动部的永磁铁采用径向充磁的圆柱形磁铁,径向圆柱形磁铁采用一侧具有缺口的中空圆柱形结构,所述摆动件的摆动本体通过相匹配的形状固定于所述具有缺口的中空圆柱形结构内。
可选地,电磁感应线圈通过电流的脉冲宽度调整(PWM)控制实现直行、左转、右转、加速、减速、上升、下降的摆动驱动控制。
一种仿生机器人,包括主机体,所述主机体包括至少一个摆动驱动装置,其特征在于,所述摆动驱动装置为上述任一一项的电磁驱动结构。
有益效果:本发明的驱动结构具有以下有益效果:
1、相对于电机驱动,本发明采用电磁驱动具有驱动结构可小型化、重量轻、功耗低,加工制造难度低,成本低廉等优点;
2、相对于接触式的电磁驱动结构,本发明创新性地将摆动件与电磁驱动结构在机械连接关系上实现了隔离,摆动件无需穿设于电磁驱动装置内部,这样整个电磁驱动部件的可以安置于一个整体的防水结构内,无需针对摆动件的驱动部分进行防水处理,进一步降低了生产加工的难度,降低了成本,更容易制造推广。由于本发明的电磁驱动结构仅需要一个整体的防水结构将电磁驱动部纳入其中,摆动件的连接不会穿设防水结构,防水的可靠性高,不用管担心活动部件导致防水结构失效的问题;
3、摆动件的致动部可以采用标准化模块生产加工,通过将不同的摆动件本体与标准化的致动部连接,即可快速获得不同的摆动件,由于本发明的摆动件与驱动本体的连接方式是可以快速拆卸和连接的,通过不同的摆动件替换,可以快速实现仿生结构的变形和变种。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例提供的一种仿生鱼的三维结构示意图。
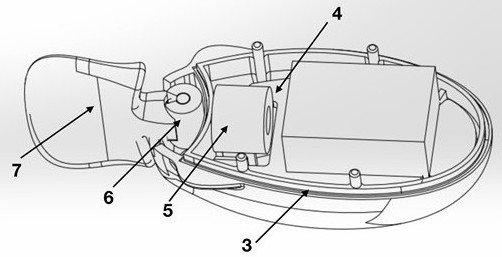
图2为本发明实施例提供的一种仿生鱼的内部结构三维示意图。
图3为本发明实施例提供的一种电磁驱动结构三维示意图。
图4为本发明实施例提供的一种电磁线圈与永磁体结构三维示意图。
图5为本发明实施例提供的一种磁性连接结构三维示意图。
附图标记:1-驱动本体,2-摆动件,3-防水结构,4-电磁驱动结构,5-电磁线圈,6-摆动件致动部,7-摆动件本体,8-装配缺口,9-摆动件本体装配接头,10-固定支架,11-电池,12-电路板,13-第一永磁体,14-第二永磁体。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
此使用的术语的目的仅在于描述具体实施例并且不作为本发明的限制。在此使用时,单数形式的“一”、“一个”和“所述/该”也意图包括复数形式,除非上下文清楚指出另外的方式。还应明白术语“组成”和/或“包括”,当在该说明书中使用时,确定所述特征、整数、步骤、操作、元件和/或部件的存在,但不排除一个或更多其它的特征、整数、步骤、操作、元件、部件和/或组的存在或添加。在此使用时,术语“和/或”包括相关所列项目的任何及所有组合。
在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
应当理解的是,本发明能够以不同形式实施,而不应当解释为局限于这里提出的实施例。相反地,提供这些实施例将使公开彻底和完全,并且将本发明的范围完全地传递给本领域技术人员。
为了彻底理解本发明,将在下列的描述中提出详细的结构,以便阐释本发明提出的技术方案。本发明的可选实施例详细描述如下,然而除了这些详细描述外,本发明还可以具有其他实施方式。
图1为本发明实施例提供的一种仿生鱼三维结构示意图,如图1所示,该仿生鱼包括驱动本体1,这里相当于仿生鱼的鱼身结构,以及与所述驱动本体配合驱动的摆动件2,在图1中相当于鱼的尾巴。所述外壳具备防水结构,所述外壳内部包括至少一个电磁驱动装置,通过所述电磁驱动装置实现所述摆动件2的摆动,进而实现了仿生鱼类似鱼类摆动前进。
图2为本发明实施例提供的一种仿生鱼的内部结构三维示意图;此图中,壳体的上盖已经移除,如图2所示,外壳具备一圈防水结构3,上下壳体通过所述防水结构3实现所述驱动本体的密封,外壳内部包括电磁驱动装置4,电磁驱动装置4包括电磁线圈5,外壳上具有容纳所述摆动件2的空腔结构,摆动件2包括致动部6以及摆动件本体7,其中所述致动部6为磁性装置,所述致动部6活动连接于所述空腔结构内,所述空腔结构内具有所述电磁驱动装置4产生的磁场,所述致动部6在磁场效应的作用下在所述空腔结构内摆动。
如图2所示,所述空腔结构位于所述防水结构3的外侧,整个摆动件包括致动部在内均在所述防水结构3外部,不再需要对摆动件做防水密封处理。
所述空腔结构的形状与所述致动部形状相匹配,空腔的体积大于致动部的体积。如图所示,在一些实施例中,所述致动部的的形状呈圆柱形,所述空腔结构具备将圆柱形结构横向插入的开口,并在空腔内形成供圆柱形结构由横向转向竖直的空间。所述致动部6可手动地从所述空腔结构中插入或移除;插入时,将所述致动部6水平横向插入空腔内部,所述致动部6在空腔内部转动为竖直状态后,摆动件2即可进行来回摆动,由于插入口的形状时横向的,竖直后的摆动件无法从横向插入口移除;取出时,仅需将所述致动部转动至水平横向状态后即可从所述空腔结构的横向插入口移除。通过上述结构,本发明的摆动件结构可以快速的连接、移除和更换。
在一些实施例中,所述空腔结构的周围的磁场由位于所述驱动本体内部的至少一个永磁体和/或电磁感应线圈产生。采用至少一个永磁体和/或电磁感应线圈的目的在于为摆动件提供一个可吸附摆动件,并在在磁场规律性变化时,摆动件能够产生规律性地运动。作为优选,所述空腔结构的周围的磁场由位于所述驱动本体内部的永磁体结合电磁线圈的方式产生。
在一些实施例中,所述致动部6的电磁感应装置可以是永磁体和/或电磁感应线圈的装置或组合。通过上述磁性装置与驱动本体内产生的磁场的相互作用,最终实现致动部6的规律性摆动。根据电磁相互作用的关系,永磁体可以采用厚度充磁,径向充磁铁、轴向充磁、轴向多级充磁或周向充磁的方式加工制造。作为优选,所述致动部6的永磁体采用径向圆柱形磁铁,所述驱动本体1内部的永磁体采用轴向圆柱形磁铁。
在一些实施例中,所述所述摆动件的永磁体以及所述驱动件本体内部的永磁体的数量可以为一个或多个。作为优选,所述所述摆动件的永磁体的数量为一个,所述驱动件本体内部的永磁体的数量为两个。
图3为本发明实施例提供的一种电磁驱动结构三维示意图,为了方便展示电磁驱动的原理,图中省去了所有外壳结构。如图3所示,电磁驱动装置4具体还包括电路板12、电池11、内部支架10。所述致动部6的圆柱形磁铁采用一侧具有缺口8的中空圆柱形结构,所述摆动本体7通过形状匹配的固定接头9固定于所述具有缺口8的中空圆柱形结构内;通过缺口定位进行安装,可以方便装配时精确地根据永磁体南北极分布确定居中位置。
图4为本发明实施例提供的一种电磁线圈与永磁体结构三维示意图。在一些实施例中,所述电磁线圈5内部包括第一永磁体13以及第二永磁体14,第一永磁体13以及第二永磁体14可以采用厚度充磁,径向充磁铁、轴向充磁、轴向多级充磁或周向充磁的方式加工制造;作为优选,所述第一永磁体13以及第二永磁体14采用轴向圆柱形磁铁。
图5为本发明实施例提供的一种磁性连接结构三维示意图,其中展示了电磁驱动结构永磁体的布局。通过所述第一永磁体13以及第二永磁体14鱼致动部部6的磁极分布,可以实现致动部的吸附和自动回正。作为优选,所述第一永磁体13以及第二永磁体14采用平行并列排布,其南北磁性的关系可以相反或相同,优选相反。
由于电磁驱动装置永磁体的存在,致动部永磁体将吸附于电磁驱动装置附近的空腔内,当通向电磁感应线圈的电流发生变化,电磁驱动装置附近的磁场随之而变化,进而驱动摆动件的致动部摆动,在一些实施例中,所述电磁感应线圈通过电流的脉冲宽度调整(PWM)控制实现直行、左转、右转、加速、减速、上升、下降的摆动驱动控制。可以预见的是,改变电流的幅值、相位、占空比等参数,磁场会产生相应的变化,其磁场变化将反映在摆动能够提供包括不限于直行、左转、右转、加速、减速、上升、下降等运动的推进力。
尽管这里已经参考附图描述了示例实施例,应理解上述示例实施例仅仅是示例性的,并且不意图将本发明的范围限制于此。本领域普通技术人员可以在其中进行各种改变和修改,而不偏离本发明的范围和精神。所有这些改变和修改意在被包括在所附权利要求所要求的本发明的范围之内。
本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
在本申请所提供的几个实施例中,应该理解到,所揭露的装置,可以通过其它的方式实现。例如,以上所描述的设备实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个设备,或一些特征可以忽略。
在此处所提供的说明书中,说明了大量具体细节。然而,能够理解,本发明的实施例可以在没有这些具体细节的情况下实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。
类似地,应当理解,为了精简本发明并帮助理解各个发明方面中的一个或多个,在对本发明的示例性实施例的描述中,本发明的各个特征有时被一起分组到单个实施例、图、或者对其的描述中。然而,并不应将该本发明的方法解释成反映如下意图:即所要求保护的本发明要求比在每个权利要求中所明确记载的特征更多的特征。更确切地说,如相应的权利要求书所反映的那样,其发明点在于可以用少于某个公开的单个实施例的所有特征的特征来解决相应的技术问题。因此,遵循具体实施方式的权利要求书由此明确地并入该具体实施方式,其中每个权利要求本身都作为本发明的单独实施例。
本领域的技术人员可以理解,除了特征之间相互排斥之外,可以采用任何组合对本说明书(包括伴随的权利要求、摘要和附图)中公开的所有特征以及如此公开的任何方法或者设备的所有过程或单元进行组合。除非另外明确陈述,本说明书(包括伴随的权利要求、摘要和附图)中公开的每个特征可以由提供相同、等同或相似目的替代特征来代替。
此外,本领域的技术人员能够理解,尽管在此所述的一些实施例包括其它实施例中所包括的某些特征而不是其它特征,但是不同实施例的特征的组合意味着处于本发明的范围之内并且形成不同的实施例。例如,在权利要求书中,所要求保护的实施例的任意之一都可以以任意的组合方式来使用。
本发明的各个部件实施例可以以硬件实现,或者以在一个或者多个处理器上运行的软件模块实现,或者以它们的组合实现。本领域的技术人员应当理解,可以在实践中使用微处理器或者数字信号处理器(DSP)来实现根据本发明实施例的一些模块的一些或者全部功能。本发明还可以实现为用于执行这里所描述的方法的一部分或者全部的装置程序(例如,计算机程序和计算机程序产品)。这样的实现本发明的程序可以存储在计算机可读介质上,或者可以具有一个或者多个信号的形式。这样的信号可以从因特网网站上下载得到,或者在载体信号上提供,或者以任何其他形式提供。
应该注意的是上述实施例对本发明进行说明而不是对本发明进行限制,并且本领域技术人员在不脱离所附权利要求的范围的情况下可设计出替换实施例。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。单词第一、第二等的使用不表示任何顺序。可将这些单词解释为名称。
- 一种电磁驱动装置及具有该电磁驱动装置的燃气阀
- 一种电磁驱动结构