一种基于自触发机制的高速列车巡航运行控制方法
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及高速列车巡航控制领域。更具体地,涉及一种基于自触发机制的具有鲁棒高效特点的高速列车巡航运行控制方法。
背景技术
与其他交通方式相比,高铁具有快速、舒适和更环保的特点。随着客运需求的增加,高速铁路的发展得到了越来越多的关注。高速列车在运行过程中不可避免地会受到外部干扰的影响,导致列车运行状态偏离预先设定的速度曲线,从而降低了高速铁路的运营效率。考虑到高速列车的运行速度可高达350km/h。为了应对如此高的速度,有必要设计一种有效的列车控制策略来确保在干扰情况下的速度跟踪精度。
随着自动控制和无线通信技术的发展,高速列车的自动跟踪控制问题也受到了国内外学者的广泛关注。然而,这些控制策略多采用定期更新的方式,即每个控制周期都需要计算控制力。由于计算控制力通常需要获取列车的实时运行状态,因此计算控制力时需要传递列车的实时状态信息。考虑到采样周期是根据最坏情况来确定的,因此采样周期通常较小,这种方式通常会导致过度使用计算和通信资源。为了解决以上问题,考虑外部干扰,本发明设计了面向高速列车巡航运行的自触发控制策略。与现有的基于时间触发的列车控制方法不同,本发明提出的方法中,新计算控制力的时刻能够根据当前状态来动态确定。在执行间隔期间,控制信号保持恒定。该方法可以保证高速列车运行的稳定性和鲁棒性,能够在不牺牲速度跟踪性能的情况下,大大减小信息传输和控制力的更新次数,从而显著提高列车的计算效率,节约通信资源。
发明内容
针对现有技术中存在的缺陷,本发明的目的在于提供一种基于自触发机制的高速列车巡航运行控制方法。
为达到以上目的,本发明采取的技术方案是:
一种基于自触发机制的高速列车巡航运行控制方法,包括以下步骤:
S1:考虑列车运行过程中列车基本阻力参数的不确定性,建立列车运行过程动力学模型,该模型是本发明中的控制对象;
S2:根据步骤S1所建立的列车运行过程动力学模型,采集列车的实时位置和速度信息,并计算列车实时状态与跟踪状态之间的偏差,并基于偏差设计事件触发条件;
S3:在步骤S2的基础上,设计基于事件触发控制的状态反馈控制增益并计算控制输入以及事件触发条件中的事件触发参数σ;
S4:基于步骤S3得到的事件触发参数σ,计算执行时间τ*(x(t
在上述方案的基础上,步骤S1的具体步骤为:
S11:列车内力f
f
其中,z
基本阻力R
空气动力阻力f
其中,
将相对位移和列车速度作为系统状态,从上述公式得到列车运行过程动力学模型,具体描述为:
其中,
S12:为了便于自触发控制器的设计,引入变量v
x(t)=[z
u(t)的具体形式表示为:
x(t)的具体形式还能转化成如下形式:
其中,
w(t)=[w
在上述方案的基础上,步骤S2的具体步骤为:
为了保证高速列车系统在外部干扰方面的稳定性,控制输入按照如下形式来设计:u(t)=Kx(t),K表示要设计的控制增益;
为了降低计算复杂度并避免通信资源的不必要浪费,引入基于事件触发控制机制,仅在某些特定的时刻对控制输入进行更新,控制输入的定义如下:
u(t)=Kx(t
其中,t
为了描述列车运行实时状态与跟踪状态之间的偏差,将偏差定义为如下形式:
e(t)=x(t
在事件触发控制机制下,高速列车系统持续监督系统状态与偏差之间的关系,并通过以下触发条件来决定是否更新系统状态和控制输入;
||e(t)||
在上述方案的基础上,步骤S3的具体步骤为:
S31:初始化列车参数,计算基本阻力系数
其中,下标j表示第j项,c
S32:根据每节车厢实际的牵引/制动性能,设置控制约束u
S33:求解线性矩阵不等式(LMI)约束,并获得鲁棒控制增益K=YQ
其中,Υ、Σ表示中间变量矩阵,Q表示正定矩阵,Y表示具有适当维数的任何矩阵,H表示正定矩阵,h
Υ=AQ+QA
其中
通过求解以上线性矩阵不等式,获得标量
S34:采集列车中车厢的实时速度v
S35:计算控制输入u(t)=Kx(t
S36:基于状态变量x(t
其中,β=||A+ΔA||表示关于矩阵A+ΔA的范数,θ(x(t
在上述方案的基础上,步骤S4的具体步骤为:
S41:当t-t
S42:否则回到步骤S34重新采集列车状态并计算控制输入,进行循环,直至列车停车。
以上反馈控制律和触发条件能够保证高速列车系统在自触发条件下的稳定性,保证高速列车中的每节车厢对于预先设定速度曲线的追踪性能。
本发明的有益效果如下:
本发明提出了一种基于自触发机制的列车巡航控制方法。该方法考虑列车的不确定参数,根据列车的运行状态以及测量偏差之间的关系实时地判断是否要对列车的控制力进行更新,在执行间隔期间,控制信号保持恒定。在该方法可以保证高速列车运行的稳定性和鲁棒性,能够在不牺牲速度跟踪性能的情况下显著提高列车的计算效率,减小通信的次数。
附图说明
本发明有如下附图:
图1-1示出了在[0s 250s]间隔内的时间-速度曲线;
图1-2示出了在[0s 250s]间隔内的控制输入曲线;
图1-3示出了在[10s 40s]间隔内的控制输入曲线;
图1-4示出了列车中不同车厢之间的作用力;
图2-1示出了没有鲁棒设计的时速曲线;
图2-2示出了在[170s 230s]间隔内的时间-速度曲线;
图2-3示出了每辆车的速度曲线;
图2-4示出了在本发明所述控制方法下在[170s 230s]的间隔内列车的时间-速度分布;
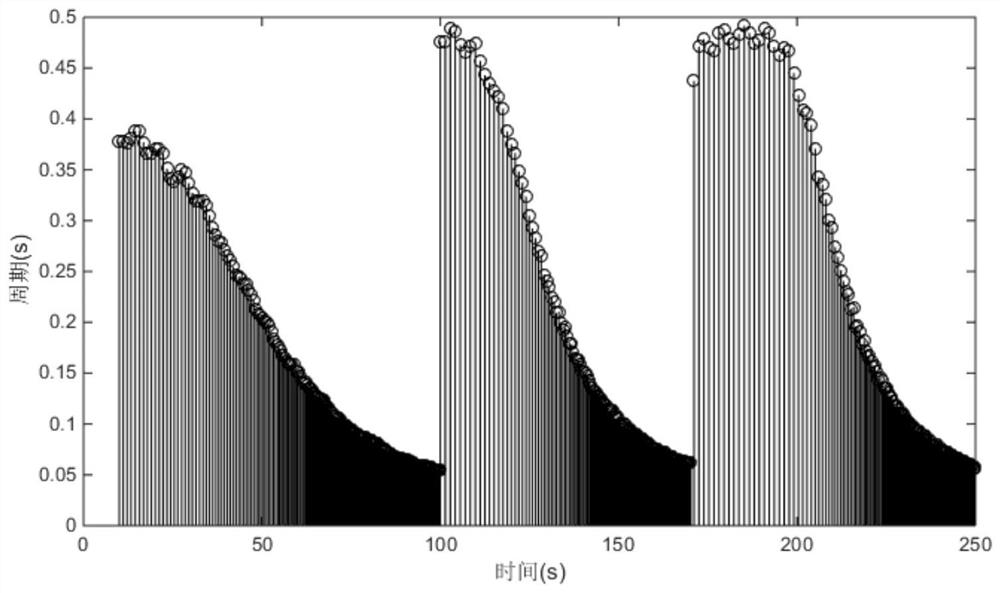
图3示出本发明提供的自触发控制的触发周期示意图。
具体实施方式
以下结合附图对本发明作进一步详细说明。
在本节中,将进行数值实验以验证所提出的方法对高速列车的实时控制的有效性。我们考虑一辆有8节车厢的高速列车。列车模型中的时变参数
表1:高速列车参数
首先,研究了在不同情况下鲁棒高效的自触发控制器的有效性。然后,对提出的策略与其他传统方法进行了对比实验,讨论了不同性能指标的结果。
在以下示例中,我们验证了所提出的自触发控制器在不同情况下用于高速列车巡航控制的性能。考虑的仿真水平范围选择为T=250s。假设高速列车以240km/h的初始速度巡航,即每辆车的初始速度为ν
通过以上的讨论,不难发现实际列车速度在加速和减速两种情况下都能跟踪期望的速度。在牵引制动过程中,列车状态接近零点时,列车内力逐渐减小,保证了重载列车运行的平稳性。验证了所提出的控制策略的有效性。
首先,考虑在没有外部环境干扰的情况下将自触发控制策略应用于高速列车运动的情况。借助Matlab LMI工具箱求解LMI(上文),获得K=YQ
从图1-1可以明显看出,列车上的每辆车都能分别在大约50s和40s内跟踪不同的参考巡航速度曲线,这证明了所提出的控制方法在加速和减速场景下的稳定性。随着每个车厢的速度接近额定巡航速度,控制输入逐渐减小,最终稳定到零状态,如图1-2所示。在速度跟踪过程中,最大加速力为5.47N/kg,最大断裂力为5.12N/kg,两者均满足输入约束u
接下来,考虑列车在[170s 190s]间隔内在不确定的干扰下运行的情况。假定每辆车厢行驶的外部干扰是随机噪声,这些噪声会服从正态分布,平均分布为-20kN,标准偏差为5。
图2-1展示了没有鲁棒设计的时速曲线。从图2-1中我们可以看到,在有扰动的情况下,实际速度曲线在170s后偏离了额定曲线,即,高速列车中的每辆车都无法准确地跟踪额定速度曲线。具体来说,在[170s 230s]间隔内的时间-速度曲线如图2-2所示,表明在扰动下与额定曲线的最大速度偏差达到了近5km/h。会影响乘坐舒适性并损害高速列车运动的运行效率。因此,设计鲁棒的列车跟踪控制方法以减轻对列车标称运行的干扰至关重要。
通过在干扰下应用鲁棒控制方案,图2-3显示了每辆车的速度曲线。显然,在提出的鲁棒自触发控制器下,每辆车在扰动后都能快速跟踪参考速度,这表明了所提出的控制方法处理扰动的有效性。具体地,在图2-4中示出了在所提出的控制方法下在[170s 230s]的间隔内列车的时间-速度分布。通过比较图2-2和图2-4,我们进一步注意到,与额定曲线的最大速度偏差从5km/h减小到0.5km/h,这有效地提高了乘坐舒适性并提高了高速列车运行的效率。仿真结果表明,该方案能够抑制干扰,从而保证了自触发巡航控制器的鲁棒性。列车运行过程中触发点分布如图3所示。
本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
- 一种基于自触发机制的高速列车巡航运行控制方法
- 一种基于自适应动态规划的高速列车优化运行控制方法