一种多功能田间原位耕作试验装置
文献发布时间:2023-06-19 11:05:16
技术领域
本发明涉及农业试验装置技术领域,具体涉及一种多功能田间原位耕作试验装置。
背景技术
土壤耕作试验台是开展耕作与种植机具性能试验的关键装备,现有技术中通常采用室内土槽的形式,但室内重塑的土壤难以反映田间土壤固有的结构性和耕性,因此也不能完全反应田间原位的土壤耕性及耕作机械的实际性能。
现有技术中的田间测试装置仅限于针对耕作部件的性能参数测试及相应设备的研究与改进,然而以拖拉机悬挂或牵引式的试验测试系统面临诸多限制,如试验参数较难精确控制、无法避免拖拉机碾压对土壤结构的破坏、多因子多水平试验所需耕地面积过大等弊端。因此田间试验能够最真实地反映耕作机械的实际性能及土壤的状态相应,然后现有技术中针对田间原位试验的专用装备较少。另外,田间地表不平度、拖拉机组的振动等因素也影响到试验的稳定性及数据质量。
发明内容
为解决现有技术中的不足,本发明提供一种多功能田间原位耕作试验装置,解决了现有技术室内土槽无法原位耕作,而拖拉机悬挂测试系统无比避免车轮碾压对土壤结构的破坏、试验参数较难精准控制以及多因子多水平试验所需耕地面积大的技术问题。
为了实现上述目标,本发明采用如下技术方案:
一种多功能田间原位耕作试验装置:包括机架及升降台组件,机架设有至少四个升降装置,升降装置的下端连接纵向导轨;
机架设有横向导轨,升降台组件包括滑动架及可相对于滑动架竖向滑动且用于连接附属工具的升降架,滑动架可滑动连接于横向导轨,升降架设有旋耕电机及连接于旋耕电机动力输出端的旋耕输出轴,旋耕输出轴用于连接旋耕刀。
作为本发明的一种优选方案,前述的一种多功能田间原位耕作试验装置:滑动架通过横移滚轮连接于横向导轨,且滑动架与机架之间设有用于驱动滑动架沿着横向导轨滑动的横移动力装置。
作为本发明的一种优选方案,前述的一种多功能田间原位耕作试验装置:横移动力装置包括横移电机、横移传动轴及连接于滑动架的链条,横移电机通过横移传动轴驱动链条拉动滑动架沿着横向导轨滑动。
作为本发明的一种优选方案,前述的一种多功能田间原位耕作试验装置:横移电机的动力输出端轴与横移传动轴之间设有多组传动比不同的链轮组。
作为本发明的一种优选方案,前述的一种多功能田间原位耕作试验装置:机架上方还设有多个龙门架,龙门架通过托轮连接链条。
作为本发明的一种优选方案,前述的一种多功能田间原位耕作试验装置:链条与滑动架之间还设有用于检测滑动架横向移动力大小的拉力传感器。
作为本发明的一种优选方案,前述的一种多功能田间原位耕作试验装置:升降装置包括升降电机、伸缩支腿及连接于伸缩支腿下端的行走轮,伸缩支腿连接机架,行走轮连接于纵向导轨,升降电机通过升降传动机构驱动伸缩支腿伸缩并使机架锁定于某一固定高度。
作为本发明的一种优选方案,前述的一种多功能田间原位耕作试验装置:升降台组件还包括升降电机,升降电机通过升降传动机构调整升降架相对于滑动架竖向滑动,升降架、滑动架之间还设有若干竖向导杆。
作为本发明的一种优选方案,前述的一种多功能田间原位耕作试验装置:旋耕输出轴设有与旋耕刀相匹配的联轴器,升降架通过安装板连接于旋耕刀,附属工具包括开沟器、铧式犁、深松铲及播种单体中的一种或多种。
作为本发明的一种优选方案,前述的一种多功能田间原位耕作试验装置:机架的端部还设有设备平台,设备平台设有与升降台组件电连接的控制柜,且控制柜与升降台组件之间的电线通过履带线槽固定。
本发明所达到的有益效果:
本发明在进行田间试验的同时能够避免对田间土壤造成破坏,并可以精准控制试验参数(如耕作深度、前进速度、旋耕刀轴转速等)及精确采集试验数据(如旋耕扭矩、牵引拉力等)。
本发明仅仅通过两个纵向导轨支撑,两个纵向导轨之间跨度较大,并且处于非试验区域,因此不会对试验结果造成影响。由于采用了导轨进行支撑,使得本发明的试验过程中运行更加平稳,同时不会对待试验的地表造成破坏。
在一定范围内,本发明所连接附属工具可根据需要进行水平移动,并且试验深度也可进行调整,能够满足多样化试验的需求。除挂接旋耕装置外,还可以挂接深松铲进行深松作业、挂接铧式犁进行犁耕作业、挂接开沟器进行开沟作业,挂接播种单体进行开沟播种作业。
相对于现有技术中的拖拉机悬挂或牵引式的试验测试系统,本发明的结构特点决定了本发明试验参数精准控制,包括可精准控制耕作深度、精准控制前进速度(且前进速度可多档位可调)、可精准控制旋耕刀轴转速等。
本发明还可配置无线遥控系统,实现试验无线遥控精准操作,通过遥控按钮实现多功能台车的升降、前进速度的快慢、旋耕刀轴转速的快慢和整体驱动平台升降等。
本发明更容易对试验过程中的数据进行精确采集,例如旋耕刀轴扭矩、牵引拉力大小等。
附图说明
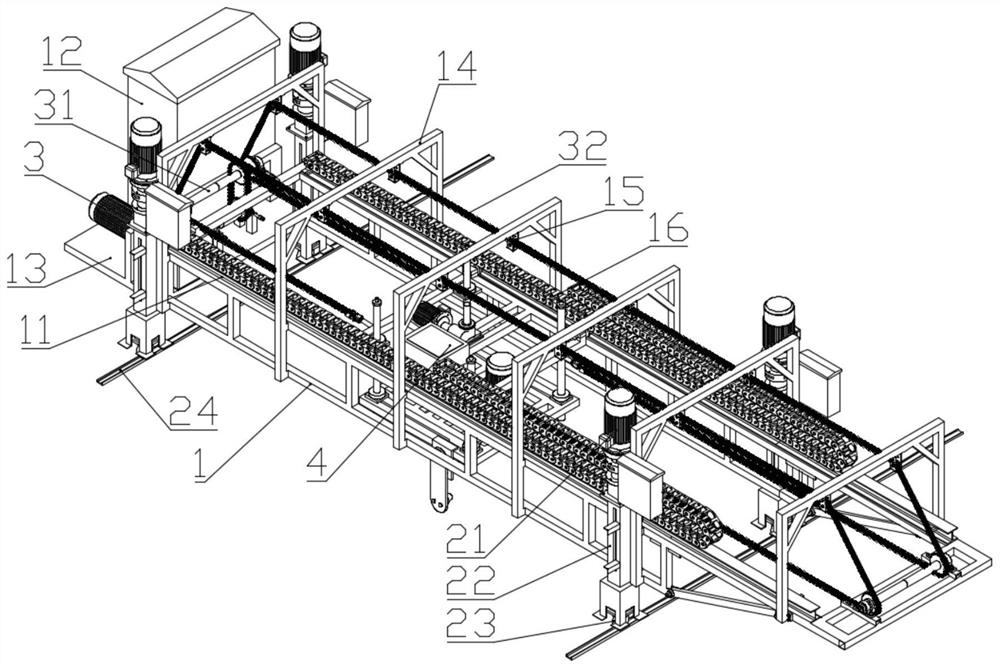
图1是本发明整体结构轴测图;
图2是本发明升降台组件轴测图;
图3是本发明升降台组件主视图;
附图标记的含义:1-机架;3-横移电机;4-升降台组件;11-横向导轨;12-控制柜;13-设备平台;14-龙门架;15-托轮;16-履带线槽;21-升降电机;22-伸缩支腿;23-行走轮;24-纵向导轨;31-横移传动轴;32-链条;41-滑动架;42-升降架;43-竖向导杆;44-横移滚轮;45-升降传动装置;46-升降电机;47-升降传动机构;5-旋耕电机;51-旋耕变速箱;52-旋耕输出轴;53-安装板。
具体实施方式
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
如图1至图3所示:本实施例公开了一种多功能田间原位耕作试验装置,包括机架1及升降台组件4,机架1设有至少四个升降装置,升降装置相当于机架1的四个支腿。升降装置的下端连接纵向导轨24,用于实现机架1的移动。机架1的端部还设有设备平台13,设备平台13设有与升降台组件4电连接的控制柜12,且控制柜12与升降台组件4之间的电线(包括动力电源线、传感器线以及可能存在的气管、油管)通过履带线槽16固定。
机架1设有横向导轨11,升降台组件4包括滑动架41及可相对于滑动架41竖向滑动且用于连接附属工具的升降架42,滑动架41可滑动连接于横向导轨11,升降架42设有旋耕电机5及连接于旋耕电机5动力输出端的旋耕输出轴52,旋耕输出轴52用于连接旋耕刀。具体的,旋耕输出轴52设有与旋耕刀相匹配的联轴器,其中联轴器可根据所需旋耕刀的结构特点配置多个,并且采用可更换设计,最好能够满足多种旋耕刀的使用需求。升降架42通过安装板53连接于旋耕刀的固定端。其中附属工具包括开沟器、铧式犁、深松铲及播种单体中的一种或多种,附属工具可通过现有技术中的任意手段固定于升降架42,例如可采用U型螺栓固定。
滑动架41通过横移滚轮44连接于横向导轨11,且滑动架41与机架1之间设有用于驱动滑动架41沿着横向导轨11滑动的横移动力装置。
升降台组件4还包括升降电机46,升降电机46通过升降传动机构47调整升降架42相对于滑动架41竖向滑动,升降架42、滑动架41之间还设有若干竖向导杆43。升降传动机构47也可采用现有技术中的任意一种,例如可采用螺纹传动的方式,升降传动机构47最好带锁定功能。
具体的:横移动力装置包括横移电机3、横移传动轴31及连接于滑动架41的链条32,横移电机3通过横移传动轴31驱动链条32拉动滑动架41沿着横向导轨11滑动。
横移电机3的动力输出端轴与横移传动轴31之间设有多组传动比不同的链轮组,这些链轮组之间通过链条连接,能够调整升降台组件4相对于机架1的横移速度。
料条32采用上循环的方式驱动升降台组件4,即机架1上方还设有多个龙门架14,龙门架14通过托轮15连接链条32。链条32与滑动架41之间还设有用于检测滑动架41横向移动力大小的拉力传感器。
升降装置包括升降电机21、伸缩支腿22及连接于伸缩支腿22下端的行走轮23,伸缩支腿22连接机架1,行走轮23连接于纵向导轨24,升降电机21通过升降传动机构驱动伸缩支腿22伸缩并使机架1锁定于某一固定高度,其中升降传动机构属于现有技术,例如可采用常用的螺纹传动方式实现传动。需要说明的是:本实施例所有的升降装置在大多数情况下需要实现同步动作,以保证机架1整体高度的一致性。
使用时,通过升降台组件4可实现机架1高度的调整,行走轮23沿着纵向导轨24滑动可实现机架1纵向位置的调整。将旋耕刀安装在安装板53,并使其动力输入端连接旋耕输出轴52,开启旋耕电机5即可实现旋耕试验。同时,当在升降架42上安装其他附属工具时,例如开沟器、铧式犁、深松铲及播种单体,这些附属工具也可以多个同时作业,纵向导轨24的上下滑动可实现相应附属工具试验深度的调整。
在试验的过程中,机架1整体高度的调节及沿着纵向导轨24滑动实现了旋耕作业范围的任意调节,升降电机46通过升降传动机构47调整升降架42相对于滑动架41竖向滑动实现了试验深度的调整。
本实施例在进行田间试验的同时能够避免对田间土壤造成破坏,并可以精准控制试验参数(如耕作深度、前进速度、旋耕刀轴转速等)及精确采集试验数据(如旋耕扭矩、牵引拉力等)。本实施例仅仅通过两个纵向导轨24支撑,两个纵向导轨24之间跨度较大,并且处于非试验区域,因此不会对试验结果造成影响。由于采用了导轨24进行支撑,使得本实施例的试验过程中运行更加平稳,同时不会对待试验的地表造成破坏。
在一定范围内,本发明所连接附属工具可根据需要进行水平移动,并且试验深度也可进行调整,能够满足多样化试验的需求。除挂接旋耕装置外,还可以挂接深松铲进行深松作业、挂接铧式犁进行犁耕作业、挂接开沟器进行开沟作业,挂接播种单体进行开沟播种作业。
相对于现有技术中的拖拉机悬挂或牵引式的试验测试系统,本发明的结构特点决定了本发明试验参数精准控制,包括可精准控制耕作深度、精准控制前进速度(且前进速度可多档位可调)、可精准控制旋耕刀轴转速等。
本发明还可配置无线遥控系统,实现试验无线遥控精准操作,通过遥控按钮实现多功能台车的升降、前进速度的快慢、旋耕刀轴转速的快慢和整体驱动平台升降等。
本发明更容易对试验过程中的数据进行精确采集,例如旋耕刀轴扭矩、牵引拉力大小等。
以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
- 一种多功能田间原位耕作试验装置
- 一种贫瘠土壤原位生态改良田间模拟试验装置