一种具有主动探测海面威胁的前视预测告警方法
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及飞机告警领域,尤其是近地告警系统前视地形预测告警方法,针对飞机超低空飞行的具有主动探测海面威胁,进行前视预测告警方法。
背景技术
现代飞机的一个重要应用环境就是海洋,随着我军掠海飞行任务的不断增加,特别是夜间海上超低空飞行,水面舰船、海上钻井平台等海面移动及新建固定目标严重威胁飞机的飞行安全。
现有增强型近地告警系统前视地形回避技术利用自身内置地形数据库,障碍物数据库等数据,沿着飞机的横向和垂向航行轨迹探查飞机前方的地形和障碍物,当存在潜在的碰撞威胁时发出警告,提示飞行员进行威胁规避。由于没有主动探测功能,现有的增强型近地告警系统还无法对海面移动舰船和新建固定目标等进行威胁告警提示。为了保障海上飞行安全,需要对近地告警设备的前视地形回避技术进行改进,增加主动探测功能,提示飞行员及时规避海面移动舰船及新建目标等威胁。
经对现有技术的文献检索,未发现近地告警系统针对海面移动目标和新建固定目标等威胁进行前视预测告警的相关专利和研究报告。
发明内容
为了克服现有技术的不足,本发明提供一种具有主动探测海面威胁的前视预测告警方法。根据飞机当前指示空速、经纬度、天向速度和航迹角参数预测飞机的实时飞行轨迹,通过将自身预测的飞行轨迹叠加到内置地形库的地形剖面图上,同时结合包括但不限于机载激光雷达、前视红外系统、视觉相机等主动式探测传感器的实时测量信息,主动识别获取海面移动舰船及新建固定目标等威胁信息,当判断出飞机与海面目标有碰撞威胁时,给出告警提示,以保障飞机海上飞行安全。
本发明解决其技术问题所采用的技术方案包括以下步骤:
步骤1:实时采集机上传感器数据,机上传感器数据包括飞机上大气数据系统实时输出的指示空速和绝对气压高度,惯性/卫星组合导航系统实时输出的经度、纬度、天向速度和航迹角信息;机上主动式探测传感器实时测量的海上移动舰船及新建固定目标的探测距离、方位角和仰角信息;主动式探测传感器包括但不限于机载激光雷达、前视红外系统和视觉相机;
步骤2:对步骤1采集的指示空速、绝对气压高度、经度、纬度、天向速度、航迹角、探测距离、方位角和仰角信息进行合理性检测;
步骤3:若通过合理性检测,则根据指示空速、绝对气压高度、经度、纬度、天向速度和航迹角信息生成飞机的前视预测轨迹,否则返回步骤1;
步骤4:若飞机当前的经纬度信息处于海洋区域且机上主动式探测传感器已开机探测到威胁点,则根据探测距离、方位角和仰角信息计算出海上威胁点位置信息,否则返回步骤1;
步骤5:将飞机的前视预测轨迹和机上主动式探测传感器探测的海上威胁点位置信息进行碰撞检测;
碰撞检测是将预测轨迹和所述海上威胁点位置信息进行比对,判断是否有相交重合部分;
步骤6:若碰撞检测到威胁,则发出告警语音和告警闪烁信息,提示飞行员进行威胁规避,否则返回步骤1,重新开始下一个周期。
所述合理性检测是指对采集信息进行合理性判断,合理性的范围根据实际飞机的动态性能确定,指示空速的合理性范围为[V
所述生成飞机的前视预测轨迹的步骤为:以飞机当前经度λ
H
其中,λ
所述计算海上威胁点位置信息的步骤为:
根据所述探测距离R、方位角α和仰角β信息计算出威胁点位置,如公式(4)、(5)和(6)所示:
H′=R×sin(β) (6)
其中,λ′为海面威胁点经度,λ″为飞机主动式探测传感器探测到威胁点的经度,R为探测距离,α为方位角,
所述碰撞检测的步骤如下:
如果在飞机预测轨迹数组中有任意一个位置信息满足公式(7),则当前时刻碰撞检测到威胁,否则无威胁;
其中,ρ
本发明的有益效果在于针对飞机超低空掠海飞行、特别是夜间海上飞行时,现有增强型近地告警系统无法对海面移动舰船和新建固定目标等威胁进行告警提示的问题,增加一种具有主动探测功能的海面前视预测告警方法,该方法简单易行,实时性强,能够有效对海面障碍物威胁进行主动探测预警,弥补了现有增强型近地告警系统无法探测海面威胁的不足,拓展了近地告警系统的使用范围,充分保障飞机海上飞行安全。
附图说明
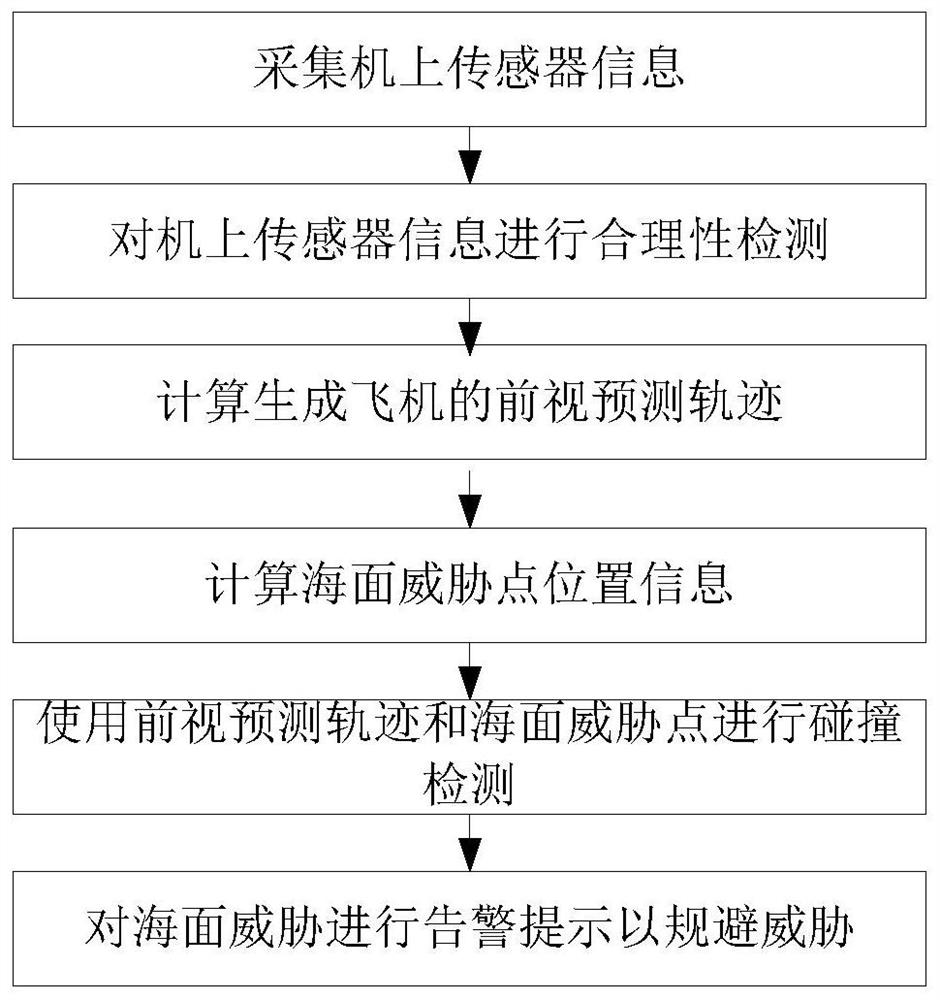
图1是本发明的具体实施流程图。
具体实施方式
下面结合附图和实施例对本发明进一步说明。
本发明设计实现一种具有主动探测功能的海面前视预测告警方法,对海面移动舰船和新建固定目标进行威胁告警。下面结合附图和实施例对本发明的实施方式进行详细说明,如图1所示,其步骤如下:
步骤1:利用数据采集装置(如FPGA+PowerPC),实时采集大气数据系统实时输出的指示空速、绝对气压高度和惯性/卫星组合导航系统实时输出的经度、纬度、天向速度和航迹角信息;实时采集包括但不限于机载激光雷达、前视红外系统、视觉相机实时测量的海面移动舰船及新建固定目标的探测距离、方位角和仰角信息,信号格式见表1:
表1采集数据的信息格式
步骤2:根据步骤1,对所述指示空速、绝对气压高度、经度、纬度、天向速度、航迹角、探测距离、方位角和仰角信息进行合理性检测;
所述合理性检测是指采集信息的合理性判断,合理性的范围根据实际飞机的动态性能确定,指示空速的合理性范围为[V
步骤3:根据步骤2,若所述采集信息通过合理性检测,则以飞机当前经度λ
H
其中,λ
步骤4:根据步骤3,若飞机当前的经纬度信息处于海洋区域且机上主动式探测传感器已开机探测到威胁点,则根据所述探测距离R、方位角α和仰角β信息计算出威胁点位置,如公式(4)、(5)和(6)所示。否则,返回步骤1;
H′=R×sin(β) (6)
其中,λ′为海面威胁点经度,λ″为飞机主动式探测传感器探测到威胁点的经度,R为探测距离,α为方位角,
步骤5:根据步骤4,将存放在数据缓存区的飞机预测轨迹和当前时刻机上主动式探测传感器探测的海面威胁点位置信息进行碰撞检测,若预测轨迹数组中的任意一个位置点与海面威胁点有重合交点,则判定碰撞检测到威胁,否则判定碰撞未检测到威胁;
所述碰撞检测方法如下:
如果在飞机预测轨迹数组中有任意一个位置信息满足公式(7),则当前时刻碰撞检测到威胁,否则无威胁;
其中,ρ
步骤6:根据步骤5,若碰撞检测到威胁,则近地告警设备通过机上通话器发出告警语音,并在飞行仪表上发出告警闪烁信息,提醒飞行员进行威胁规避,否则返回步骤1。
- 一种具有主动探测海面威胁的前视预测告警方法
- 一种近地告警系统中前视预测告警方法