一种用于螺丝自动上料的六轴机器人装置
文献发布时间:2023-06-19 11:37:30
技术领域
本发明属于螺丝自动上料的机器人装置相关技术领域,具体涉及一种用于螺丝自动上料的六轴机器人装置。
背景技术
螺丝自动上料的六轴机器人装置通过机器人将生产线上的上料盒内的工件螺丝搬运至安装位,并进行安装前的精确定位,机器人在工业制造领域应用广泛,机器人在机械制造业中主要代替人完成大批量、高质量要求的工作,如汽车制造、舰船制造及某些家电产品的制造等,化工等行业自动化生产线中的点焊、弧焊、喷漆、切割、电子装配及物流系统的搬运、包装等工作,也有部分是由机器人完成的,本发明的机器人专为基于机器人的灵活自动化的制造行业,为开放式结构,特别适合于灵活应用,本发明设计目主要用于螺丝自动上料。
现有的螺丝上料的装置技术存在以下问题:螺丝很多还是人工上料,或自动上料后还需要人工定位等,这样加重了人工成本,影响整个生产线的自动化和统一性,从而影响生产效率。
发明内容
本发明的目的在于提供一种用于螺丝自动上料的六轴机器人装置,以解决上述背景技术中提出的传统的螺丝上料置功能不完善从而影响产线生产效率的问题。
为实现上述目的,本发明提供如下技术方案:一种用于螺丝自动上料的六轴机器人装置,包括工业机器人和上料机构组件,所述工业机器人的执行末端装有上料机构组件,所述工业机器人的安装接口简单易于集成,所述上料机构组件的上连接板直接固定在工业机器人的第六轴工具法兰轴的轴端面。
优选的,所述上料机构组件包括上连接板和第二筋板,所述上连接板的下端装有第一筋板和第二筋板,所述第一筋板和第二筋板的下端面平齐,平齐面装有下连接板,上连接板、第一筋板、第二筋板、下连接板组成一个稳固的框形安装座,四者通过螺丝连接紧固,所述第二筋板左端面装有第一夹爪,所述第一夹爪的移动端各装有一个连接块,所述连接块上各装有一个通道夹爪,两个通道夹爪内有半圆通道,组合后可形成一个圆形通道,当第一夹爪收紧时,两个半圆闭合,通道夹爪夹持工件螺丝,当第一夹爪张开时,两个半圆张开,工件螺丝落下,所述第一夹爪左端面装有安装块,所述安装块上装有管道,所述安装块的管道安装孔有槽口,管道插入后锁紧槽口的螺丝,安装孔收紧锁死管道,所述工件螺丝从管道吹过来通过安装块内部通道掉入通道夹爪里面的圆形通道里面。
优选的,所述两个通道夹爪的半圆通道组合后可形成的圆形通道的为阶梯孔,上通道直径略大于工件螺丝的螺帽,中间的锥孔定位工件螺丝螺帽的位置,下通道直径略大于工件螺丝螺杆的直径,这样有利于工件螺丝的顺畅通行和定位。
优选的,所述下连接板下端装有滑台气缸,所述滑台气缸的滑块下面装有固定板,所述固定板右下端面装有安装板,所述安装板下端面装有光电开关,所述固定板左下端面装有第二夹爪,所述第二夹爪的移动端各装有一个夹爪安装座,所述前面的夹爪安装座上装有右夹爪臂,所述后面的夹爪安装座上装有左夹爪臂,所述左夹爪臂和右夹爪臂夹持掉下来的工件螺丝,并通过滑台气缸送到安装位。
优选的,所述安装板下端面装有光电开关,型号是PZ-V31P,是智能反射型光电开关,所述光电开关能检测通道夹爪通道内有无工件螺丝。
优选的,所述左夹爪臂和右夹爪臂有半圆形阶梯孔,闭合形成圆形通道,阶梯面定位工件螺丝的上下位置,上圆柱直径略大于螺帽直径,工件螺丝的螺杆被下圆柱夹紧,完成圆周定位,当滑台气缸在零位时,此左右夹爪臂圆形通道与通道夹爪的圆形通道同轴心,当第二夹爪张开时,左夹爪臂和右夹爪臂分开,工件螺丝落下,当第二夹爪收紧时,左夹爪臂和右夹爪臂闭合,工件螺丝被定位。
优选的,所述滑台气缸伸出时,固定板露出滑台气缸的上端面堵住通道夹爪内的圆形通道出口,两者之间的间隙0.5mm,实现第二夹爪工作时,通道夹爪的储料功能。
优选的,所述工业机器人是小型通用的六轴工业机器人,结构紧凑,机身小巧,结构紧凑,机身小巧,有效工作范围宽大,节拍时间短,易于集成,有利于提高生产速度,减少设备占用空间,优化工作站布局,各种优化特性使工作站缩小,有利于小件的物料处理和装配应用。
与现有螺丝上料装置技术相比,本发明提供了一种用于螺丝自动上料的六轴机器人装置,具备以下有益效果:
1、本发明的上料机构组件设置了两套气动平行夹爪装置,第一夹爪机构具备工件螺丝初定位和储料功能,第一夹爪机构的通道夹爪内的通道可以初定位工件螺丝的轴心位置,并在第二夹爪机构动作时在通道内储存一件工件螺丝,减少节拍时间;第二夹爪机构具有抓取工件螺丝的功能,并能进行工件螺丝的终定位,准确的放置到工件螺丝的安装孔内,这样工件螺丝放置在安装孔不需要多次定位或人工辅助,减少整个工序的节拍时间和人工,提高生产效率。
2、本发明的工业机器人型号为ABB IRB1200-7/0.7,置地式,负载7Kg,最大行程703mm,重复定位精度±0.02mm;所述工业机器人是小型通用的六轴工业机器人,每个轴均由单独的电机驱动,各个轴绕轴线运动,结构紧凑,机身小巧,有效工作范围宽大,节拍时间短,易于集成,有利于提高生产速度,减少设备占用空间,优化工作站布局,速度快,精度高,能更有效率的工作。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制,在附图中:
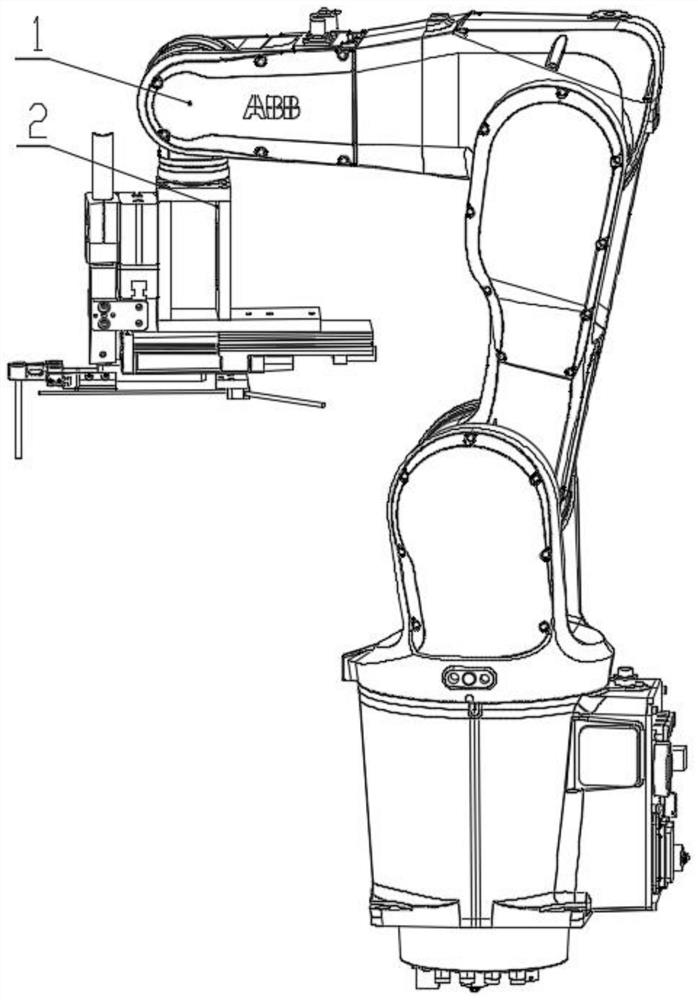
图1为本发明提出的一种用于螺丝自动上料的六轴机器人装置的主视结构示意图;
图2为本发明提出的一种用于螺丝自动上料的六轴机器人装置的上料机构组件的主视结构上料状态示意图;
图3为本发明提出的一种用于螺丝自动上料的六轴机器人装置的上料机构组件的左视结构放料状态示意图;
图4为本发明图1结构中的序号明细表;
图5为本发明图2和图3结构中的序号明细表。
图例说明:1、工业机器人;2、上料机构组件;201、下连接板;202、第一筋板;203、上连接板;204、第二筋板;205、第一夹爪;206、连接块; 207、安装块;208、通道夹爪;209、滑台气缸;210、光电开关;211、安装板;212、固定板;213、第二夹爪;214、夹爪安装座;215、管道;216、左夹爪臂;217、右夹爪臂;218、工件螺丝。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-5,本发明提供一种技术方案:一种用于螺丝自动上料的六轴机器人装置,包括工业机器人1和上料机构组件2,工业机器人1的执行末端装有上料机构组件2,上料机构组件2的上连接板203固定在工业机器人1的第六轴工具法兰轴的轴端面,上连接板203是工业机器人1和上料机构组件2的连接件。
一种用于螺丝自动上料的六轴机器人装置,上料机构组件2包括上连接板203和第二筋板204,上连接板203的下端装有第一筋板202和第二筋板 204,第一筋板202和第二筋板204装在下连接板201上面,上连接板203、第一筋板202、第二筋板204、下连接板201组成一个稳固的安装座,第二筋板204左端面装有第一夹爪205,第一夹爪205的移动端各装有一个连接块 206,连接块206上各装有一个通道夹爪208,第一夹爪205左端面装有安装块207,安装块207上装有管道215,管道215插入安装块207的有槽口的安装孔,从管道215吹过来的工件螺丝218通过安装块207内部与管道215相通的通道掉入通道夹爪208里面。
一种用于螺丝自动上料的六轴机器人装置,下连接板201下端装有滑台气缸209,滑台气缸209的滑块上装有固定板212,固定板212右下端面装有安装板211,安装板211下端面装有光电开关210,能检测通道夹爪208通道内有无工件螺丝218,固定板212左下端面装有第二夹爪213,第二夹爪213 的移动端各装有一个夹爪安装座214,前面的夹爪安装座214上装有右夹爪臂 217,后面的夹爪安装座214上装有左夹爪臂216,左夹爪臂216和右夹爪臂217闭合能夹持掉下来的工件螺丝218,实现第二夹爪213的抓取功能。
一种用于螺丝自动上料的六轴机器人装置,左夹爪臂216和右夹爪臂217 有半圆形阶梯孔,闭合形成圆形通道与工件螺丝218相合,当滑台气缸209 在零位时,此圆形通道与通道夹爪208的圆形通道同轴心,能接住通道夹爪 208内掉下的工件螺丝218,光电开关210检测到工件螺丝218掉入左夹爪臂 216和右夹爪臂217,第二夹爪213收紧,带动左夹爪臂216和右夹爪臂217 闭合,夹紧工件螺丝218,滑台气缸209伸出,固定板212露出滑台气缸209 的上端面堵住通道夹爪208内的圆形通道出口,从管道215开始吹过来下一件工件螺丝218,等待滑台气缸209缩回。
本发明的工作原理及使用流程:本发明安装好过后,新型用于螺丝自动上料的六轴机器人装置主要由工业机器人1和上料机构组件2组成。工业机器人1收到程序命令控制执行末端停在初始位置,工业机器人1通过上连接板203控制上料机构组件2停在初始位置,工件螺丝218开始从管道215吹过来,经管道215、安装块207通道掉入通道夹爪208内,此时第一夹爪205 的初始状态是收紧的,通道夹爪208闭合,通道夹爪208内的圆形通道与安装块207内的通道同轴心,此时下连接板201下面的滑台气缸209是缩回的,滑台气缸209滑块上装有固定板212,固定板212上安装有第二夹爪213,此时第二夹爪213的执行端是张开的,保证左夹爪臂216和右夹爪臂217的圆形通道与通道夹爪208内的通道同轴心,这样通道夹爪208内的工件螺丝218 定位时,工件螺丝218的螺杆部分才能准确插入左夹爪臂216和右夹爪臂217 的圆形通道内,工件螺丝218的螺杆部分插入左夹爪臂216和右夹爪臂217 的圆形通道后,光电开关210检测到工件螺丝218,第一夹爪205张开,工件螺丝218完全掉下来,左夹爪臂216和右夹爪臂217的圆形通道台阶面定位工件螺丝218的螺帽端面,第二夹爪213开始收紧,左夹爪臂216和右夹爪臂217夹紧工件螺丝218,滑台气缸209开始伸出,工业机器人1开始动作,带动上料机构组件2到达工件螺丝218到一个安装位,到达安装位后,第二夹爪213张开,工件螺丝218掉入安装位的孔内,由于工件螺丝218完全定位和工业机器人1对安装位的准确定位,工件螺丝218能快速准确的掉入安装孔内,不需反复多次对孔。当滑台气缸209伸出时,固定板212露出滑台气缸209的上端面堵住通道夹爪208内的圆形通道出口,此时管道215可以吹出下一件工件螺丝218储存在通道夹爪208内,等待下一次的动作,当工件螺丝218掉入安装孔后,光电开关210检测到工件螺丝218已不在,滑台气缸209缩回,工业机器人1运动到下一个安装位,开始第二次上料。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种用于螺丝自动上料的六轴机器人装置
- 一种六轴机器人联动自动上料装置