一种混凝土下料推平自动识别的方法
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及水利工程混凝土浇筑施工领域,特别涉及一种混凝土下料推平自动识别的方法。
背景技术
下料推平指大坝混凝土经缆机吊运到仓面,依据规划要求,将混凝土投放到指定位置,然后由平仓机(推土机)进行摊铺作业的过程。
在水利工程施工过程中,尤其是拱坝、重力坝等混凝土坝,具有工期紧、工程量巨大、施工环境恶劣、工序复杂等特点,如何保证混凝土施工机械的精细化管理和规范化作业,直接关系到大坝能否高品质高效施工。
平仓机作为大坝混凝土工程施工的关键设备,承担大坝混凝土料堆推平摊铺工作,若需满足大坝工程建设,平仓机需对每一混凝土料堆进行及时平仓,且料堆摊铺范围需符合仓面条带设计。因此,在大坝混凝土施工过程中,如何通过平仓机施工过程精细化管控,对平仓机作业过程进行控制,实现平仓机在仓面的及时、规范平仓,是保证大坝混凝土施工进度、质量的重要工作。
传统的平仓机施工作业管理,一方面是通过对平仓机驾驶员的作业培训,规范驾驶员在仓面的料堆推平施工工艺。另一方面是通过仓面管理人员的现场指挥,使驾驶员根据仓面浇筑需求进行下料推平作业。传统管理模式中,一方面对平仓机驾驶员、现场管理人员的施工经验及作业责任心有要求较高,无法保证仓面混凝土浇筑的及时推平、按条带推平。另一方面,由于没有施工过程记录,存在无法确定仓面混凝土是否是按照设计混凝土级配进行推平施工,同时存在下料推平过程在事后无法追溯的问题。因此需采用精细化、智能化的技术手段和设备对平仓机的下料推平进行全过程实时监控,进而做到平仓机的及时推平、按施工工艺需求推平,最大程度满足大坝施工进度、质量需求。
发明内容
本发明所要解决的技术问题是提供一种混凝土下料推平自动识别的方法,对平仓机作业全过程进行监控,分析平仓机推平状态,自动判断平仓机是否进行推平作业与推平过程的规范性,进而判断大坝混凝土下料推平的及时性,实现大坝混凝土下料推平全过程的智能化监控与精准化管理。
为解决上述技术问题,本发明所采用的技术方案是:一种混凝土下料推平自动识别的方法,包括如下步骤:
步骤一、平仓机的机头、机尾和缆机安装定位监控设备,平仓机上的定位监控设备安装在平仓机中轴线上;
步骤二、实时监控平仓机和下料点信息:
机头、机尾的坐标信息为P
步骤三、服务器进行信息计算。
优选的方案中,步骤三中,计算平仓机的推平区域:平仓机宽度设置为L,则平仓机机头位置P
平仓机的机头与机尾在xy平面的直线与y轴夹角为θ,则
平仓机推平区域机头左侧边界点b
b
平仓机推平区域机头右则边界点b
b
同理可得平仓机推平区域机尾右侧边界点b
b
平仓机推平区域机尾右侧边界点b
b
则平仓机推平区域边界为B(b
优选的方案中,所述步骤三中,平仓机机尾与机头的方向向量a为:
a(P
两次时刻平仓机机头的方向向量a′为:
a′(P′
则,a与a′的向量积k为:
k=a*a′=(P′
基于k值正负进行平仓机行进方向判断,若k>0,则平仓机为前进动作,若k<0,则平仓机为后退动作。
优选的方案中,所述步骤三中,判断混凝土下料堆是否开始平仓:设每罐混凝土方量为G,下料料堆为锥形,料堆底面半径为R,坯层厚度为H,推平边界点位数据集P
优选的方案中,所述步骤三中,计算平仓机下料推平时间:记录缆机下料点X完成下料时间T1,当平仓机L
优选的方案中,当下料平仓间隔T大于管控指标值时,通过服务器向平仓机作业超时预警。
优选的方案中,所述t
本发明提供的一种混凝土下料推平自动识别的方法,能够对各下料点以及平仓机的位置进行监控,该方法能够判定平仓机对各下料点的推平间隔是否超时,若超时,报送给现场指挥及后方管理人员,对推平过程进行监控,判断平仓机的行驶状态、推平区域以及混凝土下料堆是否开始平仓,基于平仓机运行轨迹的下料推平全过程统计与分析,实现平仓机下料推平运行智能化监控与分析预警。
附图说明
下面结合附图和实施实例对本发明作进一步说明:
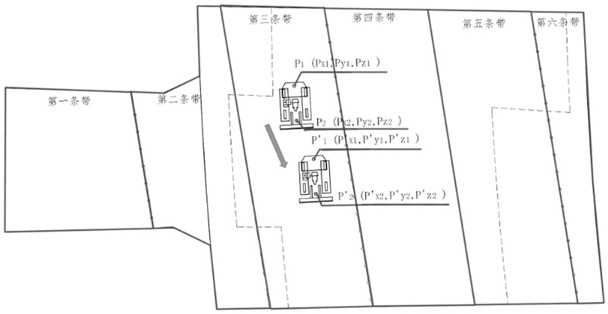
图1是平仓机的位置示意图;
具体实施方式
一种混凝土下料推平自动识别的方法,包括如下步骤:
步骤一、平仓机的机头、机尾和缆机安装定位监控设备,平仓机上的定位监控设备安装在平仓机中轴线上;
步骤二、实时监控平仓机和下料点信息:
如图1所示,机头、机尾的坐标信息为P
步骤三、服务器进行信息计算。
平仓机机尾与机头的方向向量a为:
a(P
两次时刻平仓机机头的方向向量a′为:
a′(P′
则,a与a′的向量积k为:
k=a*a′=(P′
基于k值正负进行平仓机行进方向判断,若k>0,则平仓机为前进动作,若k<0,则平仓机为后退动作。
计算平仓机的推平区域:平仓机宽度设置为L,则平仓机机头位置P
平仓机的机头与机尾在xy平面的直线与y轴夹角为θ,则
平仓机推平区域机头左侧边界点b
b
平仓机推平区域机头右则边界点b
b
同理可得平仓机推平区域机尾右侧边界点b
b
平仓机推平区域机尾右侧边界点b
b
则平仓机推平区域边界为B(b
判断混凝土下料堆是否开始平仓:设每罐混凝土方量为G,下料料堆为锥形,料堆底面半径为R,坯层厚度为H,推平边界点位数据集P
计算平仓机下料推平时间:记录缆机下料点X完成下料时间T1,当平仓机L
当下料平仓间隔T大于管控指标值时,通过服务器向平仓机作业超时预警。
平仓机下料推平的识别方法,是依据大坝混凝土浇筑效率、质量的需求而构建,并成功应用于大坝工程施工中,不仅实现了平仓机施工全过程的实时监控,而且实现了平仓机作业的过程预警及事后追溯功能,进一步完成了平仓机施工的精细化分析统计,从而为大坝施工现场指挥人员与后方管理人员提供了量化数据展示,实现了大坝工程施工的精细化管控。
- 一种混凝土下料推平自动识别的方法
- 网球平推滚压式包球方法及平推自动滚压包球机