基板输送装置、基板处理系统、基板输送方法、电子器件的制造方法及存储介质
文献发布时间:2023-06-19 13:26:15
技术领域
本发明涉及基板输送装置、基板处理系统、基板输送方法、电子器件的制造方法及存储介质。
背景技术
在有机EL显示器等的制造中,对基板执行在基板上对蒸镀物质进行成膜的成膜处理等规定的处理。在进行这样的处理时,通过输送机器人等将基板向成膜装置等各种处理装置输送。在专利文献1中,公开了输送机器人向被示教的输送位置输送基板。
在先技术文献
专利文献:
专利文献1:日本特开2019-153775号公报
发明内容
发明要解决的课题
有机EL显示器通过利用各种成膜工序在基板上形成多个层而制造。此时,根据生产线的情况,有时直至某个工序为止对大型基板(也称为基样玻璃)进行处理,之后将该大型基板切断而分割成多个更小的基板,在此以后的工序中对分割的基板进行成膜等处理。例如,在智能手机用的有机EL显示器的制造中,在背板工序(TFT形成工序、阳极形成工序等)中对第6代的大型基板(约1500mm×约1850mm)进行成膜处理等。之后,将该大型基板切断成两半,形成第6代的半切割基板(约1500mm×约925mm),在之后的工序中对该第6代的半切割基板进行成膜等处理。
在这样的情况下,从大型基板的切出位置不同的基板被依次送入比分割工序靠后的工序所使用的处理装置。但是,对于从大型基板切出的基板,有时根据从大型基板的哪个部位切出(例如,根据是基样玻璃的左半部分还是右半部分),尺寸、刚性分布这样的基板的特性不同。若基板的特性不同,则在基板载置于输送机器人等的状态下输送基板时的基板的滑动方式等产生差异,有时会造成基板被送入处理装置时的基板的位置的偏差。
本发明提供一种涉及从大型基板切出的基板的输送,抑制因切出位置的不同而导致的输送位置的偏差的技术。
用于解决课题的手段
根据本发明的一方式,提供一种基板输送装置,所述基板输送装置具备:
输送部件,其将从大型基板切出的基板向处理装置内的交接位置输送,向该处理装置所具备的基板支承部件交接所述基板;以及
控制部件,其对所述输送部件进行控制,
其特征在于,
所述基板输送装置具备获取部件,所述获取部件获取与切出所述基板的所述大型基板的部位相关的基板信息,
所述控制部件基于由所述获取部件获取的所述基板信息,使所述输送部件向所述交接位置输送所述基板。
另外,根据本发明的其他方式,提供一种基板输送装置,所述基板输送装置具备:
输送部件,其将分割大型基板而得到的多个基板中的任一个基板向处理装置内的交接位置输送,向该处理装置所具备的基板支承部件交接所述基板;以及
控制部件,其对所述输送部件进行控制,
其特征在于,
所述基板输送装置具备获取部件,所述获取部件获取由所述输送部件输送的基板的与在分割前的所述大型基板中的部位相关的基板信息,
所述控制部件使所述输送部件向根据由所述获取部件获取的所述基板信息而不同的所述交接位置输送所述基板。
另外,根据本发明的其他方式,提供一种基板处理系统,所述基板处理系统具备:
处理装置,其具有对分割大型基板而得到的多个基板中的任一个基板进行支承的基板支承部件,并对由所述基板支承部件支承的所述基板进行处理;
输送部件,其将所述基板向所述处理装置内的交接位置输送,向所述基板支承部件交接所述基板;以及
控制部件,其对所述输送部件进行控制,
其特征在于,
所述基板处理系统具备获取部件,所述获取部件获取由所述输送部件输送的基板的与在分割前的所述大型基板中的部位相关的基板信息,
所述控制部件基于由所述获取部件获取的所述基板信息,使所述输送部件向所述交接位置输送所述基板。
另外,根据本发明的其他方式,提供一种基板处理系统,所述基板处理系统具备:
处理装置,其具有对分割大型基板而得到的多个基板中的任一个基板进行支承的基板支承部件,并对由所述基板支承部件支承的所述基板进行处理;
输送部件,其将所述基板向所述处理装置内的交接位置输送,向所述基板支承部件交接所述基板;以及
控制部件,其对所述输送部件进行控制,
其特征在于,
所述基板处理系统具备获取部件,所述获取部件获取由所述输送部件输送的基板的与在分割前的所述大型基板中的相对位置相关的基板信息,
所述控制部件使所述输送部件向根据由所述获取部件获取的所述基板信息而不同的所述交接位置输送所述基板。
另外,根据本发明的其他方式,提供一种基板输送方法,所述基板输送方法包括输送工序,在所述输送工序中,将分割大型基板而得到的多个基板中的任一个基板向处理装置内的交接位置输送,向该处理装置所具备的基板支承部件交接所述基板,
其特征在于,
包括获取工序,在所述获取工序中,获取所述基板的与在分割前的所述大型基板中的部位相关的基板信息,
在所述输送工序中,基于在所述获取工序中获取的所述基板信息,向所述交接位置输送所述基板。
另外,根据本发明的其他方式,提供一种基板输送方法,所述基板输送方法包括输送工序,在所述输送工序中,将分割大型基板而得到的多个基板中的任一个基板向处理装置内的交接位置输送,向该处理装置所具备的基板支承部件交接所述基板,
其特征在于,
包括获取工序,在所述获取工序中,获取所述基板的与在分割前的所述大型基板中的部位相关的基板信息,
在所述输送工序中,向根据在所述获取工序中获取的所述基板信息而不同的所述交接位置输送所述基板。
另外,根据本发明的其他方式,提供一种电子器件的制造方法,其特征在于,所述制造方法包括:
通过上述方式的基板输送方法输送基板的输送工序;以及
在通过所述输送工序输送到作为所述处理装置的成膜装置的所述基板上进行成膜的成膜工序。
另外,根据本发明的其他方式,提供一种计算机可读取的存储介质,其特征在于,存储有用于使计算机执行上述方式的基板输送方法的各工序的程序。
发明的效果
根据本发明,能够提供一种涉及从大型基板切出的基板的输送,抑制因切出位置的不同而导致的输送位置的偏差的技术。
附图说明
图1是电子器件的生产线的一部分的示意图。
图2是一实施方式的成膜装置的概略图。
图3(A)及图3(B)是一实施方式的输送装置的说明图。
图4是表示大型基板和切割基板的例子的图。
图5是示意性地表示输送机器人将基板输送到成膜室之后的基板从目标位置的偏移的图。
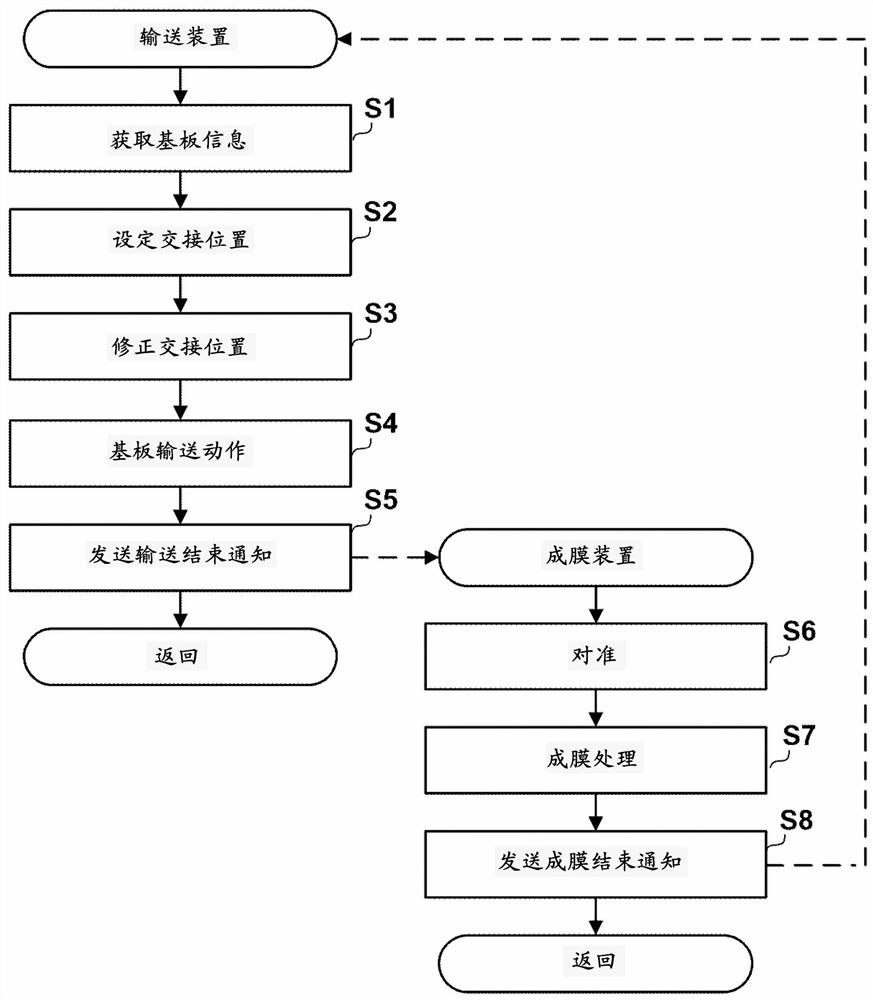
图6是表示输送装置的处理部及成膜装置的控制装置的处理例的流程图。
图7是表示输送装置的处理部的处理例的流程图。
图8(A)是表示上位装置所管理的信息的例子的图。图8(B)是表示存储部所管理的信息的例子的图。
图9(A)是有机EL显示装置的整体图,图9(B)是表示1像素的截面构造的图。
具体实施方式
以下,参照附图对实施方式进行详细说明。此外,以下的实施方式并不限定权利要求书的发明。虽然在实施方式中记载了多个特征,但未必这些多个特征全部是发明所必需的特征,另外,多个特征也可以任意组合。并且,在附图中,对相同或同样的结构标注相同附图标记,省略重复的说明。
<电子器件的生产线>
图1是表示能够应用本发明的成膜装置的电子器件的生产线的结构的一部分的示意图。图1的生产线例如用于智能手机用的有机EL显示装置的显示面板的制造,基板100被依次输送到成膜模块301,在基板100上进行有机EL的成膜。
在成膜模块301中,在具有俯视呈八边形的形状的输送室302的周围,配置有对基板100进行成膜处理的多个成膜室303a~303d和收纳使用前后的掩膜的掩膜储存室305。在输送室302配置有设置于其内部的后述的输送装置15(基板输送装置)所具有的输送基板100的输送机器人151(输送部件)。换言之,成膜模块301是以包围输送机器人151的周围的方式配置有多个成膜室303a~303d的集群型的成膜单元。此外,在将成膜室303a~303d进行统称的情况下或者不进行区别的情况下表述为成膜室303。
在基板100的输送方向(箭头方向)上,在成膜模块301的上游侧、下游侧,分别配置有缓冲室306、回旋室307、交接室308。在制造过程中,各室维持为真空状态。此外,在图1中仅图示了1个成膜模块301,但本实施方式的生产线具有多个成膜模块301,多个成膜模块301具有通过由缓冲室306、回旋室307、交接室308构成的连结装置连结的结构。此外,连结装置的结构不限定于此,例如也可以仅由缓冲室306或交接室308构成。
输送机器人151进行从上游侧的交接室308向输送室302的基板100的送入、成膜室303之间的基板100的输送、掩膜储存室305与成膜室303之间的掩膜的输送、以及从输送室302向下游侧的缓冲室306的基板100的送出。
缓冲室306是用于根据生产线的运转状况而暂时储存基板100的室。在缓冲室306设置有能够将多张基板100保持基板100的被处理面(被成膜面)朝向重力方向下方的水平状态不变地进行收纳的多层构造的基板收纳架(也称为盒体)和为了使送入或送出基板100的层与输送位置对齐而使基板收纳架升降的升降机构。由此,能够在缓冲室306中暂时收容多个基板100,使其滞留在缓冲室306。
回旋室307具备变更基板100的朝向的装置。在本实施方式中,回旋室307通过设置于回旋室307的输送机器人(未图示)使基板100的朝向旋转180度。设置于回旋室307的输送机器人在支承着在缓冲室306接收到的基板100的状态下回旋180度并向交接室308移送,从而在缓冲室306内和交接室308之间基板的前端和后端调换。由此,向成膜室303送入基板100时的朝向在各成膜模块301中成为相同的方向,因此,能够使相对于基板100的成膜的扫描方向、掩膜的朝向在各成膜模块301中一致。通过采用这样的结构,能够使各成膜模块301中向掩膜储存室305设置掩膜的朝向一致,掩膜的管理得以简化,能够提高可用性。
生产线的控制系统包括作为主计算机对整个生产线进行控制的上位装置300和控制各结构的控制装置14a~14d、309、310,它们能够经由有线或无线的通信线路300a进行通信。控制装置14a~14d与成膜室303a~303d对应地设置,对后述的成膜装置1进行控制。此外,在将控制装置14a~14d进行统称的情况下或者不进行区别的情况下表述为控制装置14。
控制装置309对输送装置15所具有的输送机器人151进行控制。控制装置310对回旋室307的装置进行控制。上位装置300将与基板100相关的信息、输送时机等指示发送到各控制装置14、309、310,各控制装置14、309、310基于接收到的指示来控制各结构。
<成膜装置的概要>
图2是本发明的一实施方式的成膜装置1的概略图。成膜装置1是在基板100上对蒸镀物质进行成膜的装置,使用掩膜101形成规定的图案的蒸镀物质的薄膜。由成膜装置1进行成膜的基板100的材质能够适当选择玻璃、树脂、金属等材料,优选使用在玻璃上形成有聚酰亚胺等树脂层的材料。作为蒸镀物质,是有机材料、无机材料(金属、金属氧化物等)等物质。成膜装置1能够应用于制造例如显示装置(平板显示器等)、薄膜太阳能电池、有机光电转换元件(有机薄膜拍摄元件)等电子器件或光学元件等的制造装置,特别是,能够应用于制造有机EL面板的制造装置。在以下的说明中,对成膜装置1通过真空蒸镀在基板100上进行成膜的例子进行说明,但本发明不限定于此,能够应用溅射、CVD等各种成膜方法。此外,在各图中,箭头Z表示上下方向(重力方向),箭头X及箭头Y表示相互正交的水平方向。
成膜装置1具有箱型的真空腔室3。真空腔室3的内部空间3a维持为真空环境或氮气等非活性气体环境。在本实施方式中,真空腔室3与未图示的真空泵连接。此外,在本说明书中,“真空”是指充满比大气压低的压力的气体的状态,换言之,是指减压状态。在真空腔室3的内部空间3a,配置有将基板100以水平姿势进行支承的基板支承单元6、支承掩膜101的掩膜台5、成膜单元4、板单元9。掩膜101是具有与要在基板100上形成的薄膜图案对应的开口图案的金属掩膜,固定在掩膜台5之上。作为掩膜101,能够使用具有在框状的掩膜框架焊接固定有几μm~几十μm左右的厚度的掩膜箔的构造的掩膜。掩膜101的材质没有特别限定,但优选使用因瓦合金等热膨胀系数小的金属。成膜处理在基板100载置于掩膜101之上且基板100与掩膜101相互重叠的状态下进行。
板单元9具备在成膜时对基板100进行冷却的冷却板10和利用磁力吸引掩膜101而使基板100与掩膜101紧贴的磁铁板11。板单元9设置为能够通过例如具备滚珠丝杠机构等的升降单元13而在Z方向上升降。
成膜单元4是由加热器、挡板、蒸发源的驱动机构、蒸发速率监视器等构成并将蒸镀物质蒸镀到基板100上的蒸镀源。更具体而言,在本实施方式中,成膜单元4是多个喷嘴(未图示)在X方向上排列配置并从各个喷嘴放出蒸镀材料的线性蒸发源。成膜单元4通过蒸发源移动机构(未图示)而在Y方向(从成膜室303与输送室302的连接部远离的方向)上往复移动。
另外,成膜装置1具备进行基板100与掩膜101的对准的对准装置2。概略而言,对准装置2利用相机(拍摄装置)7、8对形成于基板100及掩膜101的对准标记进行检测,基于该检测结果来调整基板100与掩膜101的相对位置。相机7、8配置在真空腔室3的上壁的上方,能够经由形成于上壁的窗口部(未图示)拍摄真空腔室3内的图像。相机7、8拍摄配置在真空腔室3内的基板100上设置的基板对准标记和掩膜101上设置的掩膜对准标记。通过未图示的图像处理部件对得到的图像进行处理,从而能够获取基板100和掩膜101的位置信息。相机7、8也可以说是获取基板100和掩膜101的位置信息的位置信息获取部件。
对准装置2具备对基板100的周缘部进行支承的基板支承单元6。基板支承单元6具备相互在X方向上分离地设置且沿Y方向延伸的一对底座部62和从底座部62向内侧突出的多个爪状的载置部61。此外,载置部61有时也称为“承接爪”或“指状件”。多个载置部61隔开间隔地配置在一对底座部62的每一个上。基板100的周缘部的长边侧的部分载置于载置部61。底座部62经由多个支柱64悬挂于梁构件222。
通过如本实施方式这样将底座部62在X方向上分离地形成一对而在基板100的短边侧未形成底座部62的结构,能够抑制输送机器人151向载置部61交接基板时的、输送机器人151与底座部62的干涉。由此,能够提高基板100的输送及交接的效率。但是,底座部62也可以是包围基板100的整个周缘部那样的矩形框状。另外,底座部62也可以是局部地具有切口的矩形框状。通过采用局部地具有切口的矩形框状,能够抑制输送机器人151向载置部61交接基板时的、输送机器人151与底座部62的干涉,能够提高基板100的输送及交接的效率。
基板支承单元6还具备夹紧单元63。夹紧单元63具备多个夹紧部66。各夹紧部66与各载置部61对应地设置,能够由夹紧部66和载置部61夹持基板100的周缘部来进行保持。作为基板100的支承方式,除了这样由夹紧部66和载置部61夹持基板100的周缘部来进行保持的方式之外,还能够采用不设置夹紧部66而仅在载置部61载置基板100的方式。
另外,对准装置2具备调整单元20,该调整单元20对周缘部由基板支承单元6支承的基板100与掩膜101的相对位置进行调整。调整单元20基于相机7、8的检测结果等而使基板支承单元6在X-Y平面上位移,从而调整基板100相对于掩膜101的相对位置。在本实施方式中,使掩膜101的位置固定并使基板100位移来调整它们的相对位置,但也可以使掩膜101位移来进行调整,或者,也可以使基板100和掩膜101双方都位移。
另外,对准装置2具备接离单元22,该接离单元22通过使基板支承单元6升降,使周缘部由基板支承单元6支承的基板100和掩膜101在基板100的厚度方向(Z方向)上接近及分离(远离)。换言之,接离单元22能够使基板100和掩膜101在重叠的方向上接近。作为接离单元22,也可以使用例如采用了滚珠丝杠机构的电动致动器等。
<输送装置>
图3(A)及图3(B)是输送装置15的说明图,图3(A)是表示从交接室308送出基板100时的状态的图,图3(B)是示意性地表示输送装置15的结构的侧视图。输送装置15具有将从大型基板切出的基板向处理装置输送的输送机器人151。输送机器人151是水平多关节机器人,包括主体部1511、第1臂1512、第2臂1513以及机械手1514。
主体部1511构成输送机器人151的基座部分,例如设置在输送室302的底面。更具体而言,主体部1511具备具有凸缘部1511c的有底圆筒形状的壳体1511d,经由凸缘部1511c固定于构成输送室302的底面的腔室壁302a上设置的开口部。主体部1511具有将第1臂1512的一端支承为能够转动的升降部1511b和使升降部1511b能够升降的升降机构1511a。升降机构1511a和升降部1511b配置在壳体1511d的内部。升降机构1511a例如也可以由滚珠丝杠机构构成。在该情况下,升降机构1511a包括丝杠轴、构成为与该丝杠轴螺纹接合的滚珠螺母、以及使丝杠轴旋转的马达(均未图示),在马达的驱动力的作用下丝杠轴旋转,从而使通过托架与滚珠螺母连接的升降部1511b升降。
在升降部1511b安装有用于使第1臂1512相对于主体部1511转动的马达1511e。另外,升降部1511b具备固定第1臂1512的基端侧的中空旋转轴(未图示)和将中空旋转轴支承为能够转动的圆筒状的保持构件(未图示)。当马达1511e旋转时,马达1511e的动力经由中空旋转轴传递到第1臂1512,从而第1臂1512转动。另外,第1臂1512在与底座部1511连接的端部的相反侧的端部处与第2臂连接。第2臂1513设置为能够以马达1513a为驱动源,其一端部相对于第1臂1512绕沿重力方向延伸的轴转动。另外,第2臂在与第1臂1512连接的端部的相反侧的端部处与机械手1514连接。
机械手1514具有能够转动地连结于第2臂1513的前端侧的手基部1514a和搭载基板100及掩膜101的4根手叉1514b(载置部)。机械手1514能够以马达1514c为驱动源,相对于第2臂1513绕沿重力方向延伸的轴转动。4根手叉1514b中的2根手叉1514b以相互隔开规定的间隔的状态平行地配置。该2根手叉1514b以从手基部1514a向水平方向的一侧突出的方式固定于手基部1514a。剩余的2根手叉1514b以朝向从手基部1514a向水平方向的一侧突出的2根手叉1514b的相反侧从手基部1514突出的方式固定于手基部1514。
此外,上述的输送机器人151的结构是例示,能够适当采用周知技术。例如,输送机器人151也可以是垂直多关节型的机器人。另外,机械手1514不限于通过载置基板100等来进行支承的结构,也可以是通过把持基板100的端部或吸附基板100来保持基板100的结构。
控制装置309对整个输送装置15进行控制。进一步而言,控制装置309对输送机器人151进行控制。控制装置309具备处理部3091(控制部件)、存储部3092、输入输出接口(I/O)3093以及通信部3094。
处理部3091是以CPU(Central Processing Unit)为代表的处理器,执行存储于存储部3092的程序来控制输送装置15。存储部3092是ROM(Read Only Memory)、RAM(RandomAccess Memory)、HDD(Hard Disk Drive)等存储设备(存储部件),除了存储处理部3091所执行的程序之外,还存储各种控制信息。I/O(Input/Output)3093是发送接收处理部3091与外部设备之间的信号的接口。通信部3094是经由通信线路300a与上位装置300或其他控制装置14、310等进行通信的通信设备,处理部3091经由通信部3094从上位装置300等接收信息,或者向上位装置300等发送信息。此外,控制装置309、14、310和上位装置300的全部或一部分也可以由PLC(Programmable Logic Controller)、ASIC(Application SpecificIntegrated Circuit)、FPGA(Field Programmable Gate Array)构成。
<基板>
本实施方式的基板100是从大型基板切出的切割基板。图4是表示大型基板和切割基板的例子的图。大型基板MG是第6代全尺寸(约1500mm×约1850mm)的基样玻璃,具有矩形形状。在大型基板MG的一部分的角部,形成有用于确定大型基板MG的朝向的定向平面OF。
此外,在此,示出了仅大型基板MG的4个角部中的1个角部被切掉而形成定向平面OF的例子,但并不限定于此,也可以是虽然4个角部全部被切掉,但将1个角部切掉得比其他角部大,从而形成定向平面OF。在该情况下,能够将切掉成与其他角部不同的形状的部分作为定向平面OF。
如上所述,例如,在智能手机用的有机EL显示器的制造中,在背板工序(TFT形成工序、阳极形成工序等)中对第6代全尺寸的大型基板MG进行成膜处理等。之后,将该大型基板MG切断成两半(切出工序),切断而得到的第6代的半切割尺寸(约1500mm×约925mm)的基板100向本实施方式的生产线中的进行有机层的成膜的成膜模块301送入。送入成膜模块301的基板100是从大型基板MG切出而得到的2种分割基板中的任一种,在本实施方式中是基板100A或基板100B。大型基板MG在距作为其一边的基准边为距离L的位置的切断线CTL处切断,从而得到基板100A和基板100B。在图1所例示的生产线中,基板100A和基板100B混合,作为基板100进行输送,进行各种处理。
此外,在此,设为将大型基板MG切断成两半,但并不限定于此,只要将大型基板MG切断而分割成大致相同大小的多个基板即可。例如,也可以将大型基板MG分割为4部分而形成4个基板100,将其送入成膜模块301。
基板100A和基板100B有时尺寸、刚性分布这样的基板的特性不同。例如,基板100A成为短边的长度被裁量为L的基板,但基板100B的短边的长度未被裁量,有时基板100A和基板100B之间短边的长度不同。另外,在基板100B中存在定向平面OF,但在基板100A中没有定向平面OF。切断面处的残余应力的大小有时也在基板100A和基板100B之间不同。另外,切断面的位置在基板100A中为右边,在基板100B中为左边,部位不同。这样的基板的特性的不同有时会对基板输送时的基板100的动作产生影响。
图5是示意性地表示输送机器人151将基板100输送到成膜室303之后的基板100从目标位置的偏移的图。在本实施方式中,输送机器人151在机械手1514的手叉1514b上载置着基板100的状态下输送基板。因此,在输送时,基板100有时会相对于手叉1514b滑动。在该情况下,即使输送机器人151本身相对于成膜装置1内的载置部61在相同的相对位置交接基板100,载置于载置部61的基板100有时也会从作为目标的输送位置偏移(偏移量Ax及Ay)。而且,由于上述的基板的特性的不同,有时在基板100A和基板100B之间该偏移量Ax、Ay的倾向也不同。也就是说,在基板100A和基板100B之间,有时输送机器人151向成膜装置1交接的交接位置不同。另一方面,对于载置于载置部61的基板100,之后要由对准装置2执行对准。但是,在基板100A和基板100B之间交接位置产生偏移的情况下,有时对准需要时间,或者对准的精度会降低。
因此,在本实施方式中,如以下说明的这样,进行与切出基板100的大型基板MG的部位对应的基板的输送控制。
<控制例>
对控制装置309的处理部3091所执行的输送装置15的控制例以及控制装置14所执行的成膜装置1的控制例进行说明。图6是表示处理部3091及控制装置14的处理例的流程图,图7是表示处理部3091的处理例的流程图。本流程图例如基于处理部3091从上位装置300收到基板100的输送指示这一情况而开始。
在步骤S1(以下,简称为S1。对于其他步骤也同样。)中,处理部3091获取接下来要输送的基板100的基板信息(获取工序)。在本实施方式中,基板信息包含与基板100在分割之前的大型基板MG中的相对位置相关的信息。换言之,该信息是与切出基板100的大型基板MG的部位相关的部位信息,也可以称为“切出信息”或“切割信息”。这样,处理部141具有作为获取基板100的与在分割前的大型基板MG中的部位相关的基板信息的获取部件的功能。在本实施方式中,在图4中,将与大型基板MG的切断线CTL的左侧的部位对应且切割位置处于图面右侧的基板100A设为A切割,将与大型基板MG的切断线CTL的右侧的部位对应且切割位置处于图面左侧的基板100B设为B切割。处理部3091获取要输送的基板100是A切割还是B切割作为基板信息。
另外,在本实施方式中,基板信息与基板100的其他信息相关联地由上位装置300进行管理。图8(A)示出了上位装置300所管理的信息的例子。在本实施方式中,上位装置300将用于识别各基板100的识别信息、该基板100的基板信息(是基板100A还是基板100B)以及输送路线信息相对应地进行存储。然后,在上位装置300向控制装置309等指示基板100的处理的情况下,将识别信息和基板信息发送到作为指示对象的控制装置309等。也就是说,在S1中,处理部3091通过经由通信部3094从上位装置300接收与基板100相关的信息而获取基板信息。此外,上位装置300例如也可以从切断大型基板MG的切断装置(基板分割装置)或生产线中配置在比成膜装置1靠上游侧的位置的其他装置、或者生产线的外部的装置来获取基板信息,也可以受理生产线的操作者的输入,根据操作者的输入来获取基板信息。
在S2中,处理部3091设定基板100的交接位置。在本实施方式中,输送装置15按照设置在成膜模块301内的各成膜室303中的每个成膜装置1将与交接位置相关的位置信息存储于存储部3092。处理部3091基于从上位装置300获取的输送路线信息来确认作为输送目的地的成膜装置1,基于与该成膜装置1对应的位置信息来设定基板100的交接位置。与交接位置相关的位置信息例如可以是在整个成膜模块301中的固定坐标系、在成膜装置1中的固定坐标系的坐标信息,也可以是输送机器人151的控制参数。输送机器人151的控制参数例如可以是驱动输送机器人151的各部分的各马达的输出电流、输出电压等,也可以是检测各马达的旋转角度的旋转编码器的目标值等。
在S3中,处理部3091基于在S1中获取的基板信息,对在S2中设定的基板100的交接位置进行修正。图8(B)是表示存储部3092所管理的信息的例子的图。在本实施方式的情况下,存储部3092将作为用于修正基板信息交接位置的交接位置修正信息的交接位置偏置量和基板信息相对应地进行存储。处理部3091从存储部3092读取与在S1中获取的基板信息对应的交接位置偏置量,按照读取的偏置量对基板100的交接位置进行修正。从某一侧面来看,处理部3091在S2中设定作为输送目的地的交接位置的基准值,在S3中基于基板信息而使交接位置从基准值偏置。此外,偏置量例如可以是X方向及Y方向上的与基准值的相对距离,也可以是输送机器人151的控制参数等。
此外,每个该基板信息的偏置量例如也可以在将输送机器人151向生产线设置时等执行的、用于示教基板100的输送轨迹、交接位置的教学作业时设定。例如,也可以在教学作业时,按照基板100的每个种类(A切割、B切割)来测定使输送机器人151移动到成膜装置1内的交接位置时的、载置于输送机器人151的基板100从目标位置的偏移量。而且,也可以基于该测定结果,设定因基板信息而不同的偏置量,以便按照基板100的每个种类来抵消从目标位置的偏移。
设定交接位置修正信息时使用的、使输送机器人151移动到成膜装置1内的交接位置时的基板100从目标位置的偏移量也可以使用成膜装置1的相机7或8进行测定。例如,在使输送机器人151移动到成膜装置1内的交接位置之后(S1~S5之后),利用相机7或8检测形成于基板100的基板对准标记、基板100的端部或角部,获取基板100的位置信息。然后,基于获取的基板100的位置信息和目标位置,获取实际输送之后的基板100的位置与目标位置之间的偏移量。此外,向交接位置输送后的基板100的位置信息的获取可以在基板100被输送机器人151支承的状态下进行,也可以在向基板支承单元6的交接完成之后基板100被基板支承单元6支承的状态下进行。向交接位置输送后的基板100的位置信息的获取也可以兼用作S6中由对准装置2进行基板100与掩膜101的对准时的由相机7或8进行的测量。
这样,若使用成膜装置1的相机7或8来测定使输送机器人151移动到成膜装置1内的交接位置时的基板100从目标位置的偏移量,则不需要另外设置用于测定从目标位置的偏移量的测定部件,因此,能够简化装置结构。另外,不仅在教学作业时,在生产线的运转中也能够进行偏置量的更新,因此,也能够适时地应对因环境的变化、装置随时间的变化而导致的输送偏移的变动,能够维持输送精度。此外,虽然设为基于使用相机7或8测定的基板100的位置信息来更新偏置量,但并不限定于此,也可以以抵消上述的偏移的方式直接更新交接位置的位置信息。
在S4中,处理部3091进行基板输送动作(控制部件)。具体而言,处理部3091对输送机器人151进行控制,将基板100输送至在S2及S3中设定的交接位置,载置基板100。从某一侧面来看,处理部3091通过S2~S4,基于获取的基板信息,使输送机器人151将基板100向交接位置输送。在S5中,处理部3091向作为交接对象的成膜装置1的控制装置14及/或上位装置300发送基板输送动作已结束这一意思的输送结束通知。通过以上步骤,输送装置15侧的处理结束。
成膜装置1的控制装置14在接收到输送结束通知时,在S6中通过对准装置2进行基板100与掩膜101的对准。此外,省略详细的说明,但作为对准的方法,能够采用周知技术。
在S7中,成膜装置1的控制装置14在对准结束后,执行成膜处理。在此,通过成膜单元4经由掩膜101在基板100的下表面形成薄膜。当成膜处理结束时,在步骤S8中,控制装置14向输送装置15的控制装置309及/或上位装置300发送成膜已结束这一意思的成膜结束通知。通过以上步骤,成膜装置1侧的处理结束。
此外,在参照上位装置300所管理的输送路线信息,基板100的下一个输送目的地是成膜模块301内的别的成膜室303内的成膜装置1的情况下,接收到了成膜结束通知的处理部3091也可以再次从S1开始反复处理。另外,在下一个输送目的地是缓冲室306的情况下,处理部3091也可以基于基板信息来变更基板100的交接位置。
图7是表示S3所示的交接位置修正的具体例的流程图。
在S31中,处理部3091确认在S1中获取的基板信息,若是A切割则进入S32,若是B切割则进入S33。在S32中,处理部3091基于图8(B)所示的基板信息与交接位置偏置量的关系,获取偏置量(Δx=x1,Δy=y1)。在S33中,处理部3091基于图8(B)所示的基板信息与交接位置偏置量的关系,获取偏置量(Δx=x2,Δy=y2)。在S34中,处理部3091基于在S32或S33中获取的偏置量,对在S2中设定的交接位置进行修正。由此,在基板100是A切割的情况下和是B切割的情况下变更交接位置。
此外,x1及x2的关系以及y1及y2的关系没有特别限定。例如,可以在A切割和B切割之间偏置量Δx、Δy分别不同(x2≠x1且y2≠y1)。另外,也可以在A切割和B切割之间偏置量Δx、Δy中的任一个不同。例如,可以为x2≠x1且y2=y1,也可以为x2=x1且y2≠y1。
或者,也可以存在A切割和B切割的偏置量Δx、Δy相同(x2=x1且y2=y1)的情况。即,在本实施方式中,虽然存储部3092将与A切割对应的偏置量和与B切割对应的偏置量分别进行存储,但也可以存在它们的值为相同值的情况。进一步而言,只要存储部3092将交接位置偏置量与基板信息相对应地区别存储,在交接基板100时根据基板信息来选择并使用存储的多个交接位置偏置量的任一个,则交接位置偏置量的具体的值没有特别限定。此外,例如,即使在处理某个基板时在基板100是A切割的情况下和是B切割的情况下交接位置偏置量为相同值,有时也会在处理了几张基板之后如上述那样再设定或更新交接位置偏置量,因此,不一定始终为相同值。
如以上说明的这样,在本实施方式中,处理部3091基于基板信息,使输送机器人151将基板100向交接位置输送。由此,关于从大型基板切出的基板的输送,能够抑制因切出位置的不同而导致的输送位置的偏差。进一步而言,在本实施方式中,在从大型基板的切出位置不同的基板100A和基板100B之间设定不同的交接位置。因此,即使由于从大型基板的切出位置不同而导致基板的特性不同,该特性的不同对基板输送时的基板100的动作产生影响的情况下,也能够抑制输送位置的偏差。
另外,在本实施方式中,在进行基板100相对于基板支承单元6的载置部61的位置调整时,不使基板支承单元6工作而是使输送机器人151工作。因此,在维持了成膜单元4与基板支承单元6的相对的位置关系不变的状态下执行基板100相对于载置部61的位置调整。由此,在基板100载置于载置部61之后,不需要每次都执行成膜单元4和基板支承单元6的位置调整,因此,能够缩短作业时间。
<电子器件的制造方法>
下面,对电子器件的制造方法的一例进行说明。以下,作为电子器件的例子,例示有机EL显示装置的结构及制造方法。在该例的情况下,图1所例示的成膜模块301在生产线上例如设置3处。
首先,对要制造的有机EL显示装置进行说明。图9(A)是有机EL显示装置50的整体图,图9(B)是表示1像素的截面构造的图。
如图9(A)所示,在有机EL显示装置50的显示区域51,具备多个发光元件的像素52以矩阵状配置有多个。详细情况之后说明,但发光元件分别具有具备被一对电极夹着的有机层的构造。
此外,在此所说的像素是指在显示区域51中能够进行所期望的颜色的显示的最小单位。在彩色有机EL显示装置的情况下,通过显示出互不相同的发光的第1发光元件52R、第2发光元件52G、第3发光元件52B这多个副像素的组合而构成像素52。像素52往往由红色(R)发光元件、绿色(G)发光元件以及蓝色(B)发光元件这3种副像素的组合构成,但并不限定于此。像素52只要包含至少1种副像素即可,优选包含2种以上的副像素,更优选包含3种以上的副像素。作为构成像素52的副像素,例如,也可以是红色(R)发光元件、绿色(G)发光元件、蓝色(B)发光元件以及黄色(Y)发光元件这4种副像素的组合。
图9(B)是图9(A)的A-B线的局部剖视示意图。像素52具有由在基板53上具备第1电极(阳极)54、空穴传输层55、红色层56R·绿色层56G·蓝色层56B中的任一个、电子传输层57以及第2电极(阴极)58的有机EL元件构成的多个副像素。其中,空穴传输层55、红色层56R、绿色层56G、蓝色层56B、电子传输层57相当于有机层。红色层56R、绿色层56G、蓝色层56B分别形成为与发出红色、绿色、蓝色的发光元件(有时也表述为有机EL元件)对应的图案。
另外,第1电极54按每个发光元件分离地形成。空穴传输层55、电子传输层57以及第2电极58可以遍及多个发光元件52R、52G、52B共通地形成,也可以按每个发光元件形成。即,也可以如图9(B)所示,空穴传输层55遍及多个副像素区域作为共通的层形成之后,红色层56R、绿色层56G、蓝色层56B按每个副像素区域分离地形成,进而在此之上电子传输层57和第2电极58遍及多个副像素区域作为共通的层形成。
此外,为了防止接近的第1电极54之间的短路,在第1电极54之间设置有绝缘层59。并且,由于有机EL层会因水分、氧而劣化,因此,设置有用于保护有机EL元件不受水分、氧的影响的保护层60。
在图9(B)中,用一个层示出了空穴传输层55、电子传输层57,但也可以根据有机EL显示元件的构造,由具有空穴阻挡层、电子阻挡层的多个层形成。另外,也可以在第1电极54与空穴传输层55之间形成具有能带构造的空穴注入层,以能够使空穴从第1电极54顺利地向空穴传输层55注入。同样地,也可以在第2电极58与电子传输层57之间也形成电子注入层。
红色层56R、绿色层56G、蓝色层56B分别可以由单一的发光层形成,也可以通过层叠多个层而形成。例如,也可以将红色层56R由2层构成,使上侧的层由红色的发光层形成,使下侧的层由空穴传输层或电子阻挡层形成。或者,也可以使下侧的层由红色的发光层形成,使上侧的层由电子传输层或空穴阻挡层形成。通过这样在发光层的下侧或上侧设置层,调整发光层中的发光位置,调整光程长度,从而具有提高发光元件的色纯度的效果。
此外,在此,示出了红色层56R的例子,但绿色层56G、蓝色层56B也可以采用同样的构造。另外,层叠数也可以为2层以上。并且,可以将发光层和电子阻挡层这样不同材料的层层叠,也可以例如将发光层层叠2层以上等将相同材料的层层叠。
下面,具体说明有机EL显示装置的制造方法的例子。在此,设想红色层56R由下侧层56R1和上侧层56R2这2层构成,绿色层56G和蓝色层56B由单一的发光层构成的情况。
首先,准备形成有用于驱动有机EL显示装置的电路(未图示)以及第1电极54的基板53。此外,基板53的材质没有特别限定,能够由玻璃、塑料、金属等构成。在本实施方式中,作为基板53,使用在玻璃基板上层叠有聚酰亚胺的膜的基板。
在形成有第1电极54的基板53之上通过棒涂(日文:バーコート)、旋涂来涂覆丙烯酸或聚酰亚胺等的树脂层,利用光刻法以在形成有第1电极54的部分形成开口的方式将树脂层图案化而形成绝缘层59。该开口部相当于发光元件实际发光的发光区域。此外,在本实施方式中,直至形成绝缘层59为止对大型基板进行处理,在形成绝缘层59后,执行分割基板53的分割工序。
将绝缘层59形成图案的基板53送入第1成膜室303,使空穴传输层55在显示区域的第1电极54之上作为共通的层而成膜。空穴传输层55利用按照最终成为1个1个的有机EL显示装置的面板部分的显示区域51形成有开口的掩膜来进行成膜。
接下来,将形成至空穴传输层55的基板53送入第2成膜室303。进行基板53与掩膜的对准,将基板载置在掩膜之上,在空穴传输层55之上的、基板53的配置发出红色的元件的部分(形成红色的副像素的区域),对红色层56R进行成膜。在此,在第2成膜室中使用的掩膜是仅在成为有机EL显示装置的副像素的基板53上的多个区域中的成为红色的副像素的多个区域形成有开口的高精细掩膜。由此,包含红色发光层的红色层56R仅在成为基板53上的多个副像素的区域中的成为红色的副像素的区域成膜。换言之,红色层56R在成为基板53上的多个副像素的区域中的成为蓝色的副像素的区域、成为绿色的副像素的区域不成膜,在成为红色的副像素的区域选择性地成膜。
与红色层56R的成膜同样地,在第3成膜室303中对绿色层56G进行成膜,然后在第4成膜室303中对蓝色层56B进行成膜。在红色层56R、绿色层56G、蓝色层56B的成膜完成之后,在第5成膜室303中在整个显示区域51上对电子传输层57进行成膜。电子传输层57作为共通的层而形成于3色的层56R、56G、56B。
将形成至电子传输层57的基板移动到第6成膜室303,对第2电极58进行成膜。在本实施方式中,在第1成膜室303~第6成膜室303中通过真空蒸镀进行各层的成膜。但是,本发明并不限定于此,例如第6成膜室303中的第2电极58的成膜也可以通过溅射进行成膜。之后,将形成至第2电极58的基板移动到密封装置并通过等离子CVD对保护层60进行成膜(密封工序),完成有机EL显示装置50。此外,在此设为通过CVD法形成保护层60,但并不限定于此,也可以通过ALD法、喷墨法形成。
在此,第1成膜室303~第6成膜室303中的成膜使用形成有与要形成的各个层的图案对应的开口的掩膜来进行成膜。在成膜时,在进行了基板53与掩膜的相对的位置调整(对准)之后,在掩膜之上载置基板53而进行成膜。在此,各成膜室中进行的对准工序按上述的对准工序那样进行。
<其他实施方式>
在上述实施方式中,输送装置15将基板100输送到成膜装置1。但是,也可以在输送装置15向进行成膜以外的处理的处理装置输送基板100时执行上述的处理(S1~S5)。作为进行成膜以外的处理的处理装置,可举出上述的密封装置等。
另外,在上述实施方式中,上位装置300将各基板100的识别信息、基板信息以及输送路线信息相对应地进行存储,输送装置15的存储部3092将基板信息和交接位置偏置量相对应地进行存储。但是,也可以由上位装置300将这些信息统一管理。
另外,交接位置的偏置量也可以按照成膜模块301内的每个成膜装置1分别设置。即,偏置量也可以基于基板信息及成膜装置1来设定。但是,偏置量仅与基板信息对应,也能够采用若基板信息相同则在各成膜装置1中使用相同的偏置量的结构。
另外,在上述实施方式中,处理部3091在设定了交接位置的基准值之后,基于基板信息使交接位置偏置。但是,也可以将多个交接位置的位置信息分别与多个基板信息(在上述实施方式中为A切割和B切割)相对应而得到的信息存储于存储部3092。换言之,也可以将因基板的切出位置引起的输送偏移考虑在内而预先进行了修正的交接位置的位置信息与信息相对应地存储于存储部3092。而且,处理部3091也可以读取与获取的基板信息对应的位置信息,控制输送机器人151以便在按照读取的位置信息的交接位置交接基板100。也就是说,与基板信息相对应的信息不限于从交接位置的基准值的偏置量,也可以是交接位置本身的位置信息,例如在整个成膜模块301中的固定坐标系、在成膜装置1中的固定坐标系的坐标信息等。
另外,在上述实施方式中,处理部3091通过通信从上位装置300获取基板信息(S1)。但是,处理部3091对基板信息的获取也可以为其他方式。例如,也可以是输送装置15具备能够检测定向平面OF的有无的相机等检测装置,处理部3091基于其检测结果来获取基板信息。另外,也可以将例如表示基板信息的条形码等标识符赋予各基板100,处理部3091通过读取标识符来获取基板信息。
此外,在上述实施方式中,成膜室303内的成膜装置1可以说具有1个包括基板支承单元6及掩膜台5等而构成的基板台,但成膜装置1也可以具有2个以上的基板台。由此,能够在成膜单元4对位于一方的基板台的基板100进行成膜的期间将基板100送入另一方的基板台,进行对准装置2的对准等,能够提高作业效率。而且,在这样的结构中,存储部3092也可以将基于基板信息的偏置量按照每个基板台进行存储。处理部3091也可以控制输送机器人151以便基于基板信息及载置有基板100的基板台来变更交接位置。
另外,在上述实施方式中,设为将基板信息和基板100的识别信息相关联地由上位装置300进行管理,但也可以是基板100的识别信息本身包含基板信息。例如,也可以在构成识别信息的字符串等中包含表示基板信息的部分。在该情况下,处理部3111能够根据从上位装置300接收到的基板100的识别信息来获取基板信息。
本发明也能够通过如下处理来实现:将实现上述的实施方式的1个以上的功能的程序经由网络或存储介质向系统或装置供给,该系统或装置的计算机中的1个以上的处理器读取并执行程序。另外,也能够通过实现1个以上的功能的电路(例如ASIC)来实现。
发明并不限定于上述实施方式,能够在不脱离发明的精神及范围的情况下进行各种变更及变形。因此,为了公开发明的范围而附上权利要求。
附图标记说明
1成膜装置,15输送装置(基板输送装置),151输送机器人(输送部件),3091处理部(获取部件、控制部件),3092存储部(存储部件),100基板,101掩膜。
- 基板输送装置、基板处理系统、基板输送方法、电子器件的制造方法及存储介质
- 基板输送装置、基板输送组件、基板输送方法以及计算机可读存储介质